






WitMotion HWT901B Akcelerometr z czujnikiem ciśnienia – MPU9250 9-osiowy żyroskop/kąt/kompas AHRS IMU, 0,1° pitch/roll, 200Hz, RS232/RS485/TTL, IP68
WitMotion HWT901B Akcelerometr z czujnikiem ciśnienia – MPU9250 9-osiowy żyroskop/kąt/kompas AHRS IMU, 0,1° pitch/roll, 200Hz, RS232/RS485/TTL, IP68
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WitMotion HWT901B to przemysłowy inklinometr referencyjny do pomiaru postawy &i kierunku, który integruje wysokoprecyzyjny żyroskop 3-osiowy, akcelerometr 3-osiowy oraz magnetometr 3-osiowy z odzyskiwaniem pola magnetycznego. Wysokowydajny 32-bitowy MCU uruchamia wewnętrzny solver postawy z dynamiczną fuzją + filtrowaniem Kalman, dostarczając stabilne, niskoszumowe dane kątowe. Typowa dokładność nachylenia/rolla wynosi 0,1° (statyczna); długoterminowa stabilność kierunku osiągana jest dzięki fuzji 9-osiowej z kompensacją magnetometru (wymagana kalibracja). Wytrzymała obudowa aluminiowa oferuje ochronę IP68, szeroki zakres zasilania 5–36 V oraz solidną odporność EMC do użytku w trudnych warunkach przemysłowych przez długi czas.
Kluczowe cechy
-
9-osiowy AHRS z filtracją Kalman i zaawansowanym filtrowaniem cyfrowym w celu tłumienia szumów i dryfu
-
Kompenacja magnetometru z czujnikiem geomagnetycznym PNI RM3100 w standardzie wojskowym dla wysokiej powtarzalności i automatycznego odzyskiwania z zakłóceń magnetycznych
-
Wybierana zawartość wyjściowa: czas, przyspieszenie 3-osiowe, prędkość kątowa 3-osiowa, kąt 3-osiowy, pole magnetyczne 3-osiowe
-
Regulowane prędkości: baud 4800–230400 bps; wyjście 0.2–200 Hz (maks 200 Hz)
-
Interfejsy: TTL / RS-232 / RS-485; opcja CAN pokazana na liście modeli
-
Wytrzymała konstrukcja: aluminiowa obudowa, IP68 uszczelnienie, silna odporność na EMI
-
Darmowe oprogramowanie na PC (krzywe w czasie rzeczywistym, rejestrowanie/eksport, kalibracja, konfigurowalna szerokość pasma i zawartość) oraz aplikacja na Androida do konfiguracji i przeglądania danych
-
Typowe zastosowania: maszyny budowlane, inteligentne rolnictwo, dźwigi wieżowe, linie automatyzacji
Specyfikacje
Parametry akcelerometru
|
Parametry |
Stan |
Typowa wartość |
Zakres pomiaru |
±16g |
|
|
Współczynnik rozdzielczości |
±16g |
0.0005(g/LSB) |
|
Szum RMS |
Szerokość pasma=100Hz |
0.75~1mg-rms |
|
Statyczny dryf zerowy |
Umieścić poziomo |
±20~40mg |
|
Dryf temperaturowy |
-40°C ~ +85°C |
±0.15mg/℃ |
|
Pasmo przenoszenia |
5~256Hz |
Parametry żyroskopu
|
Parametry |
Stan |
Wartość typowa |
|
Zakres pomiarowy |
±2000°/s |
|
|
Stosunek rozdzielczości |
±2000°/s |
0.061(°/s)/(LSB) |
|
Szum RMS |
Pasmo przenoszenia=100Hz |
0.028~0.07(°/s)-rms |
|
Statyczny dryf zerowy |
Umieścić poziomo |
±0.5~1°/s |
|
Dryf temperaturowy |
-40°C ~ +85°C |
±0.005~0.015 (°/s)/℃ |
|
Pasmo przenoszenia |
5~256Hz |
Parametry magnetometru
|
Parametry |
Stan |
Wartość typowa |
|
Zakres pomiarowy |
±2Gauss |
|
|
Stosunek rozdzielczości |
±2Gauss |
8.333nT/LSB |
Parametry kąta nachylenia i przechylenia
|
Parametry |
Stan |
Typowa wartość |
|
Zakres pomiarowy |
X:±180° |
|
|
Y:±90° |
||
|
Dokładność nachylenia |
0.1° |
|
|
Stosunek rozdzielczości |
Umieścić poziomo |
0.0055° |
|
Dryf temperatury |
-40°C ~ +85°C |
±0.5~1° |
Kąt kierunkowy
|
Parametry |
Warunki |
Typowa wartość |
|
Zakres pomiarowy |
Z:±180° |
|
|
Dokładność kierunku |
Algorytm 9-osiowy, kalibracja pola magnetycznego, dynamiczny/statyczny |
1°(Bez zakłóceń od pól magnetycznych)【1】 |
|
Algorytm 6-osiowy, statyczny |
0.5°(Istnieje dynamiczny błąd całkowity) 【2】 |
|
|
Współczynnik rozdzielczości |
Umieścić poziomo |
0.0055° |
Uwaga:【1】Proszę przeprowadzić kalibrację pola magnetycznego w środowisku testowym przed użyciem, aby upewnić się, że czujnik jest zaznajomiony z polem magnetycznym w otoczeniu. Podczas kalibracji proszę trzymać się z dala od zakłóceń magnetycznych.
【2】W niektórych środowiskach wibracyjnych wystąpią błędy kumulacyjne. Konkretne błędy nie mogą być oszacowane i są uzależnione od rzeczywistych testów.
Zastosowania
Poziomowanie dźwigów budowlanych/pojazdów, narzędzia rolnicze i automatyczne sterowanie w logistyce, monitorowanie kołysania/kąta dźwigów wieżowych oraz automatyzacja fabryczna w zakresie feedbacku dotyczącego postawy/pochylenia.
Szczegóły

Przemysłowy, wytrzymały inklinometr, dokładność 0,05° w osi XY, przyspieszenie 3-osiowe, żyroskop, kąt, pole magnetyczne, kwaternion.
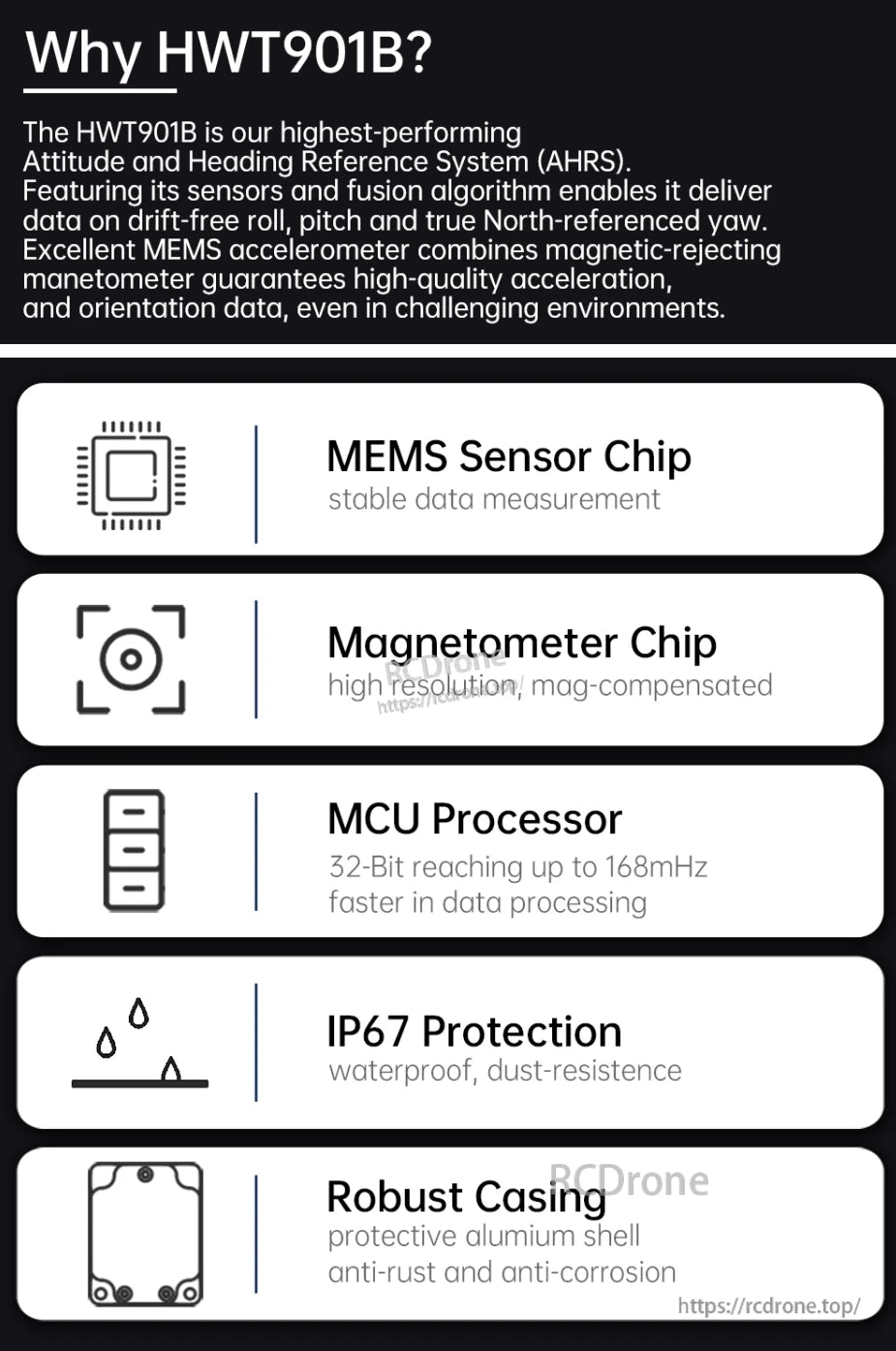
HWT901B to wysokowydajny AHRS z czujnikiem MEMS, magnetometrem, 32-bitowym MCU, ochroną IP67 i obudową aluminiową. Zapewnia dane o roll, pitch, yaw bez dryfu, stabilne pomiary, kompensację magnetyczną, szybkie przetwarzanie, wodoodporność i odporność na korozję.
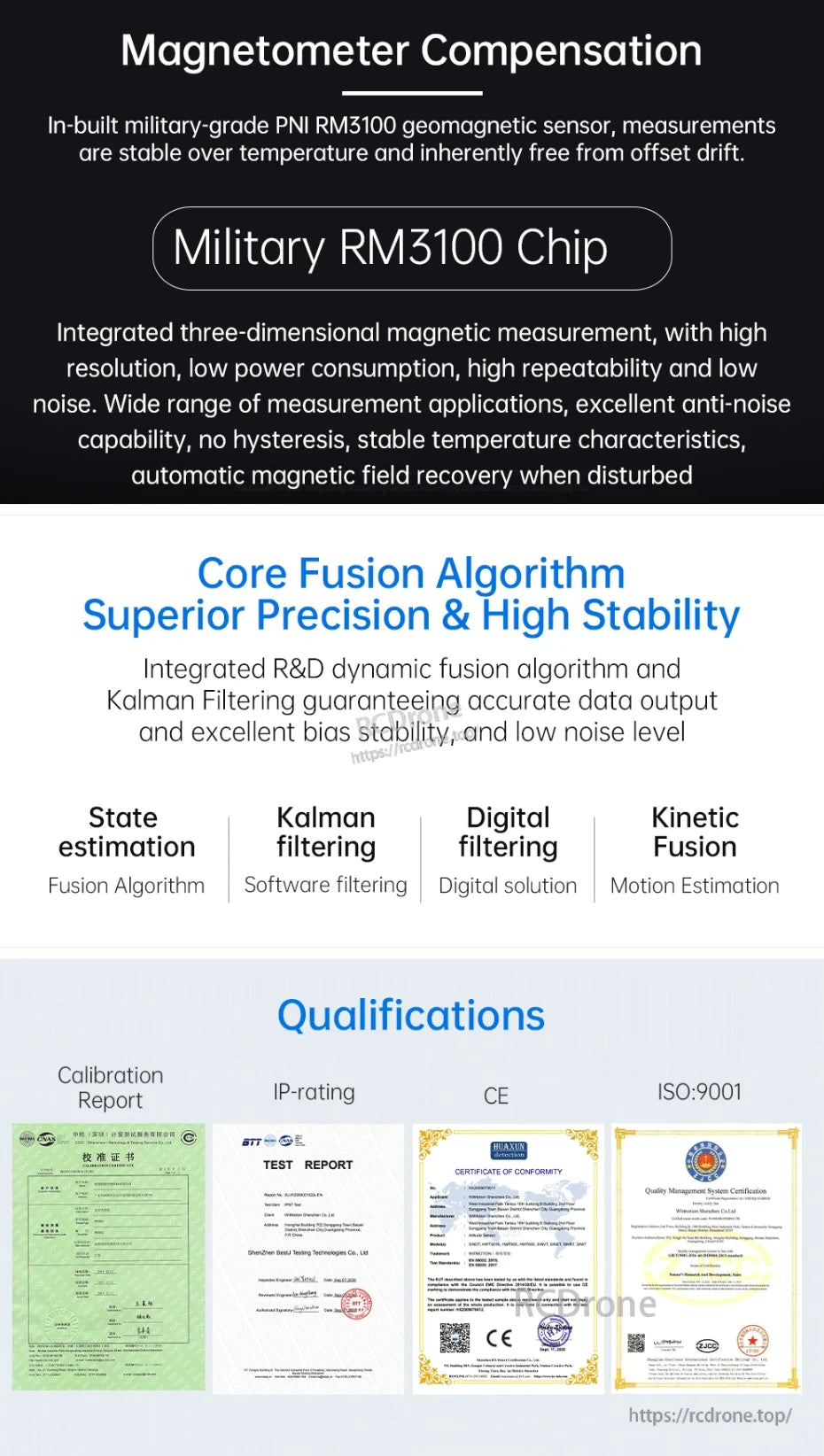
WitMotion HWT901B zawiera magnetometr RM3100 o standardzie wojskowym, algorytm fuzji rdzeniowej oraz certyfikaty takie jak CE, ISO-9001, klasyfikacja IP i raport kalibracyjny.
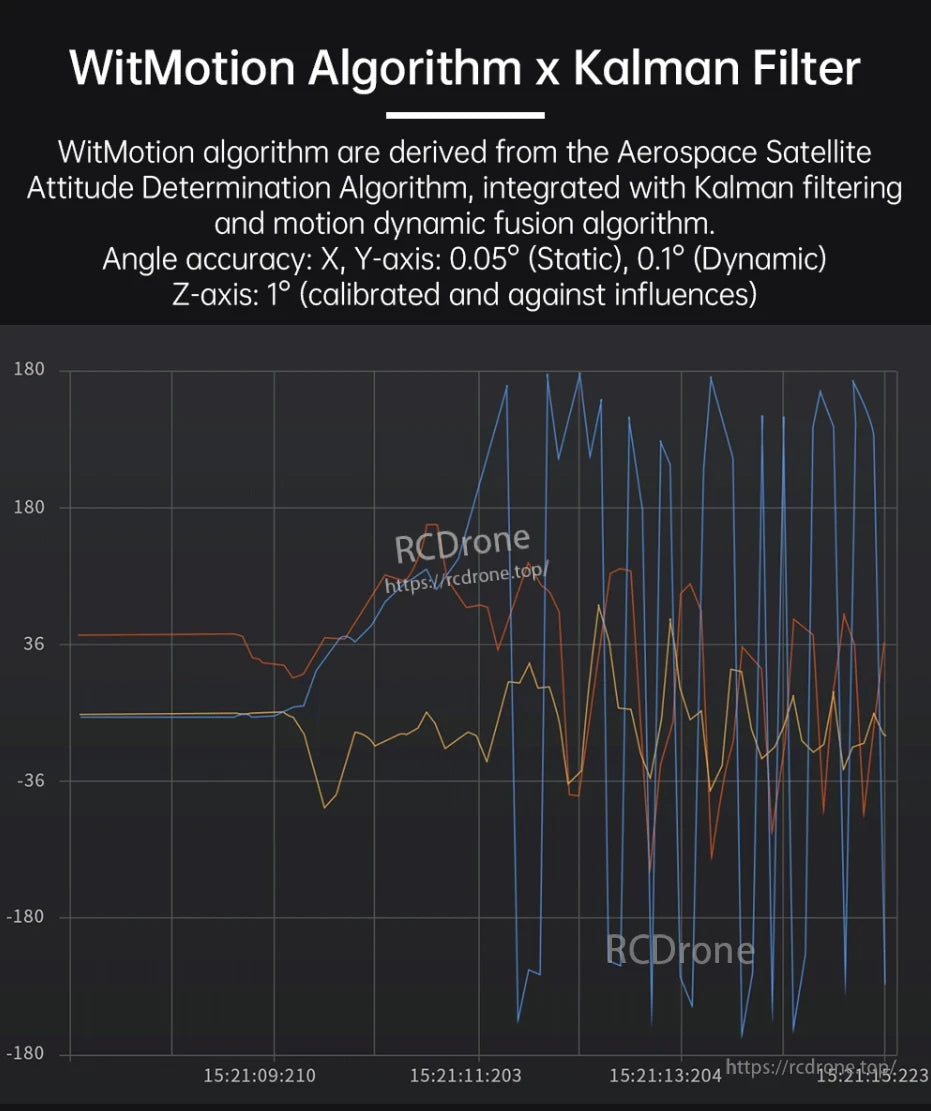
Algorytm WitMotion x Filtr Kalman. Oparty na algorytmie określania postawy satelity w lotnictwie, zintegrowany z filtrowaniem Kalman i fuzją dynamiki ruchu. Dokładność kąta: oś X, Y 0,05° (statyczna), 0,1° (dynamiczna); oś Z 1° (skalibrowana).
Wysokiej prędkości procesor 32-bitowy, 168MHz, niskoprądowy, szybkie przetwarzanie danych

Wodoszczelny akcelerometr IP67 z aluminiową obudową, trwały w trudnych warunkach.
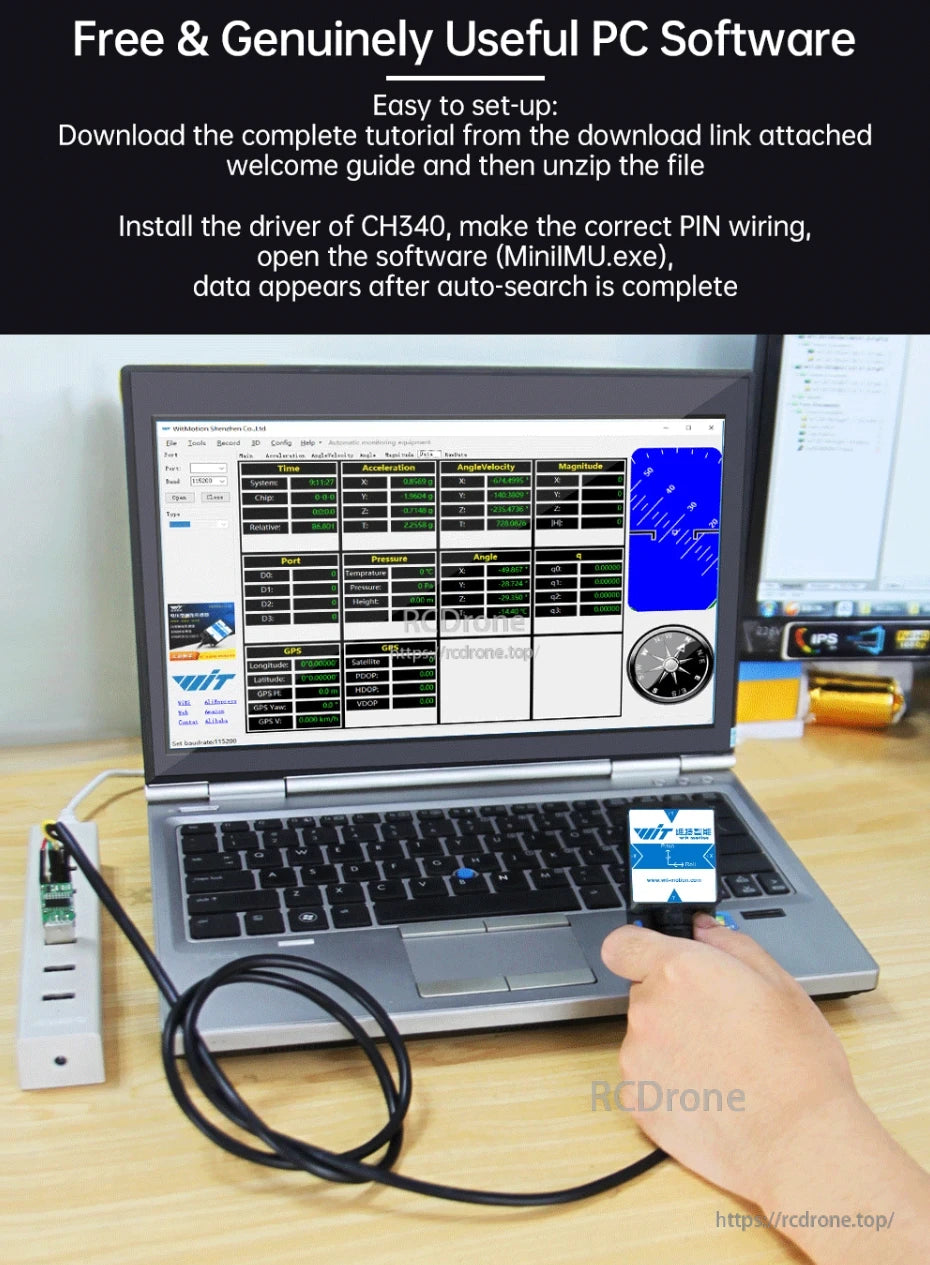
Darmowe & i naprawdę przydatne oprogramowanie PC dla akcelerometru WitMotion HWT901B. Łatwa konfiguracja: pobierz samouczek, zainstaluj sterownik CH340, podłącz przez USB, uruchom MiniIMU.exe. Wyświetlanie danych w czasie rzeczywistym obejmuje przyspieszenie, kąt, GPS i inne na interfejsie laptopa.
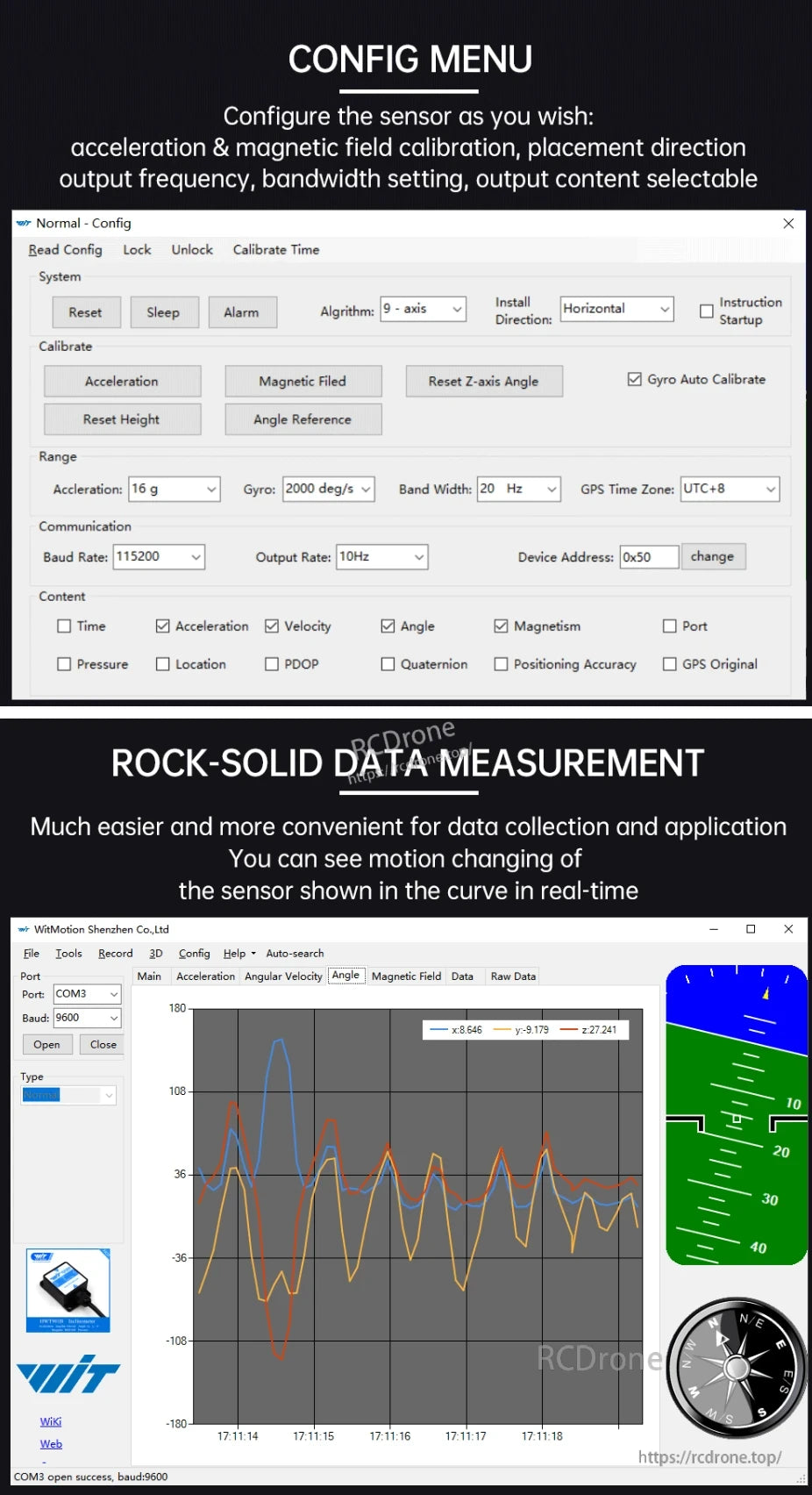
Akcelerometr WitMotion HWT901B oferuje konfigurowalne ustawienia, takie jak kalibracja, częstotliwość wyjściowa i zawartość danych. Umożliwia wizualizację danych ruchu w czasie rzeczywistym z pomiarami kąta, przyspieszenia i pola magnetycznego dla dokładnego i wygodnego zbierania danych.
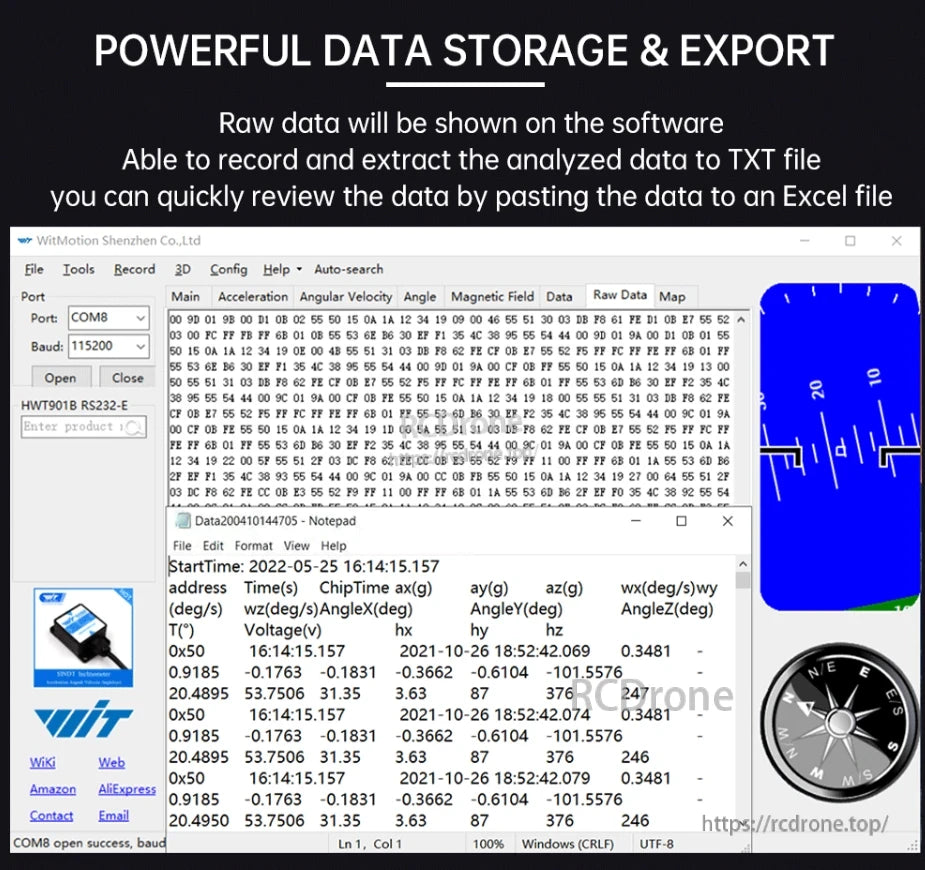
Akcelerometr WitMotion HWT901B oferuje przechowywanie danych, odczyty w czasie rzeczywistym, logi z znacznikami czasowymi oraz wizualizację kompasu.Dane wyświetlane w oprogramowaniu, zapisywane jako TXT i importowane do Excela w celu analizy.
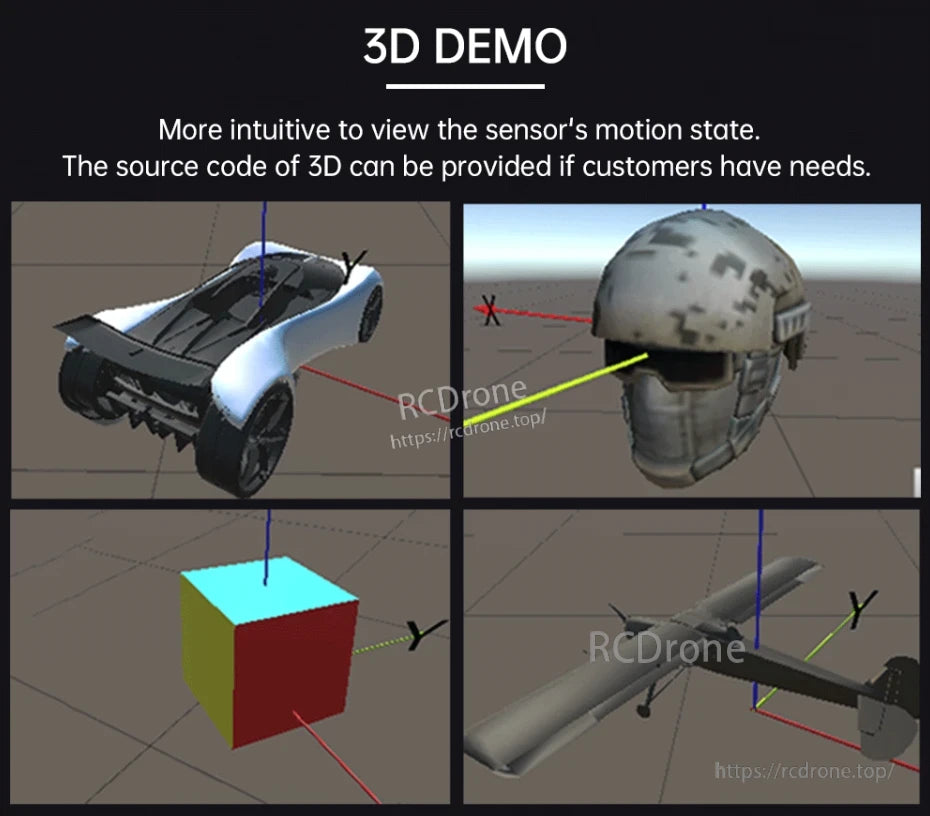
3D demonstracja wizualizacji stanu ruchu czujnika z modelami samochodu, kasku, sześcianu i drona.
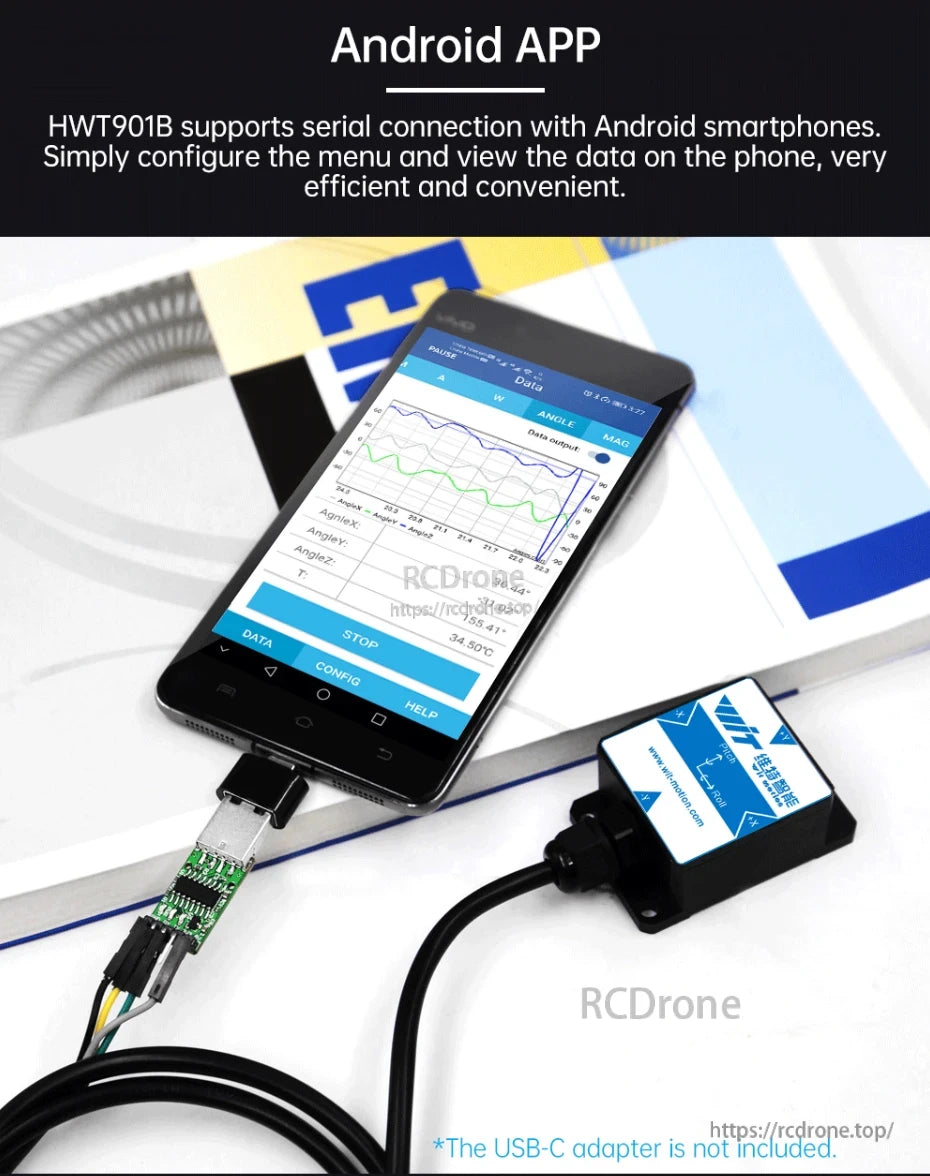
HWT901B obsługuje połączenie szeregowe z Androidem dla efektywnego wyświetlania danych. Aplikacja wyświetla kąt, dane magnetyczne i temperaturę. Adapter USB-C nie jest dołączony.
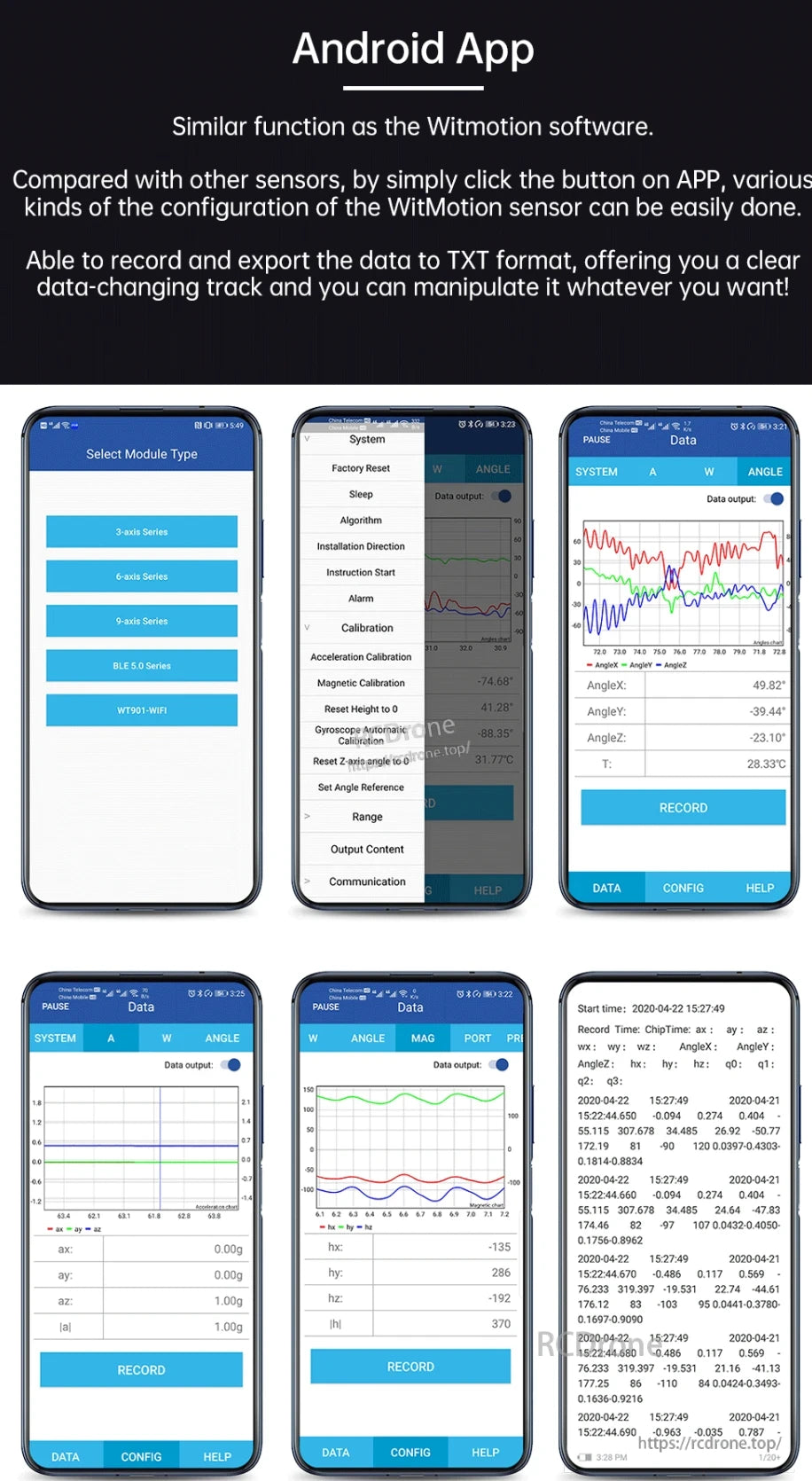
Aplikacja na Androida do konfiguracji czujnika WitMotion, rejestrowania danych i eksportu. Funkcje obejmują wybór modułu, kalibrację, wyświetlanie danych w czasie rzeczywistym oraz eksport w formacie TXT. Obsługuje 3-osiowe, 6-osiowe, 9-osiowe, BLE 5.0 oraz serię WT901-WIFI.

Zestawy rozwojowe zawierają podręcznik, kartę danych, oprogramowanie na Windows, sterowniki CH340 & CP2102, przykładowy kod dla STM32, Arduino, 51, C++ i Matlab. Zawierają pliki PDF, folder ze sterownikami, filmy demonstracyjne oraz aplikację na Androida.
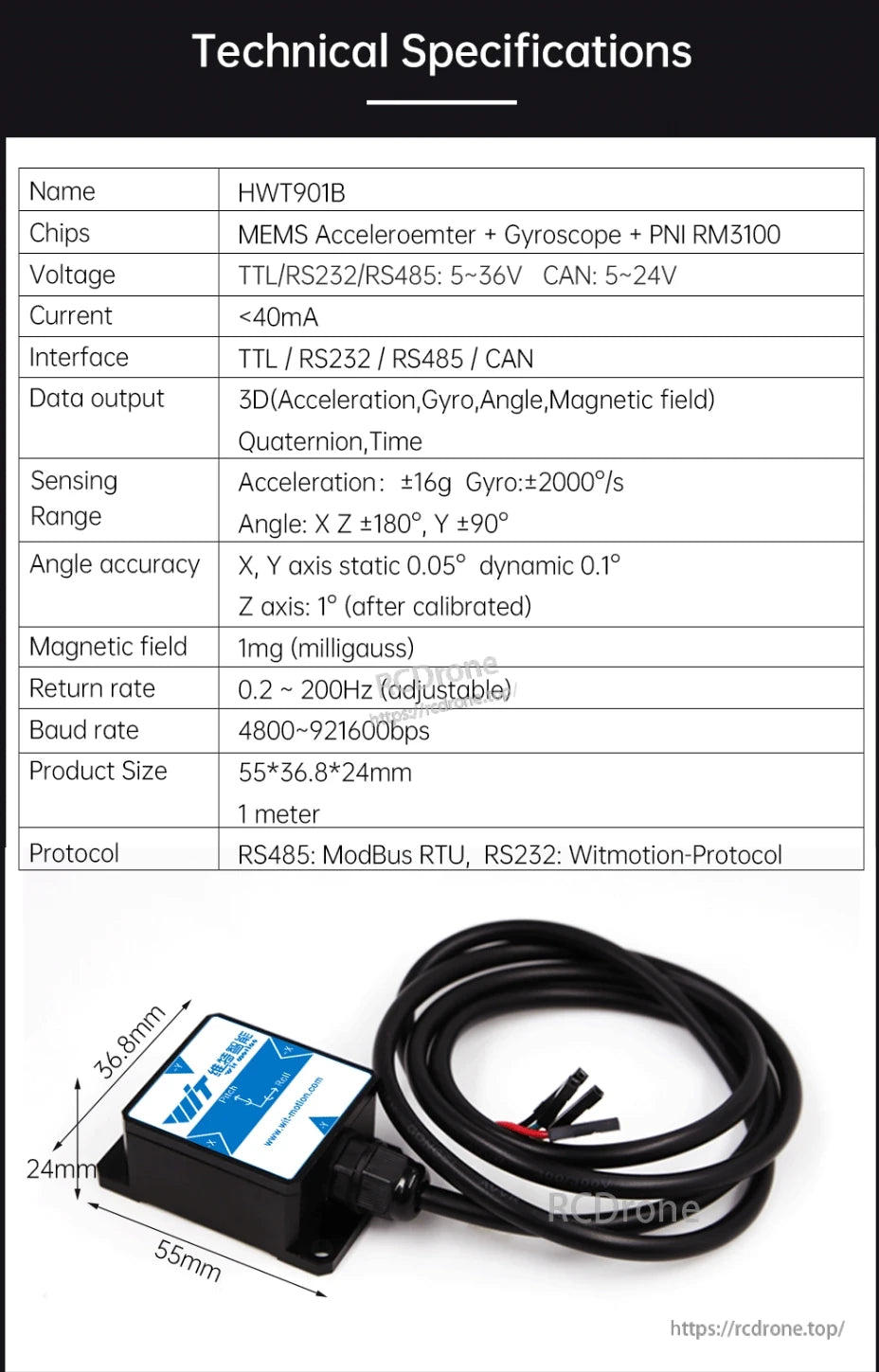
HWT901B to czujnik 3D z akcelerometrem MEMS, żyroskopem i magnetometrem. Obsługuje wiele interfejsów, oferuje wysoką dokładność i mierzy przyspieszenie, kąt oraz pole magnetyczne. Wymiary: 55×36.8×24mm.
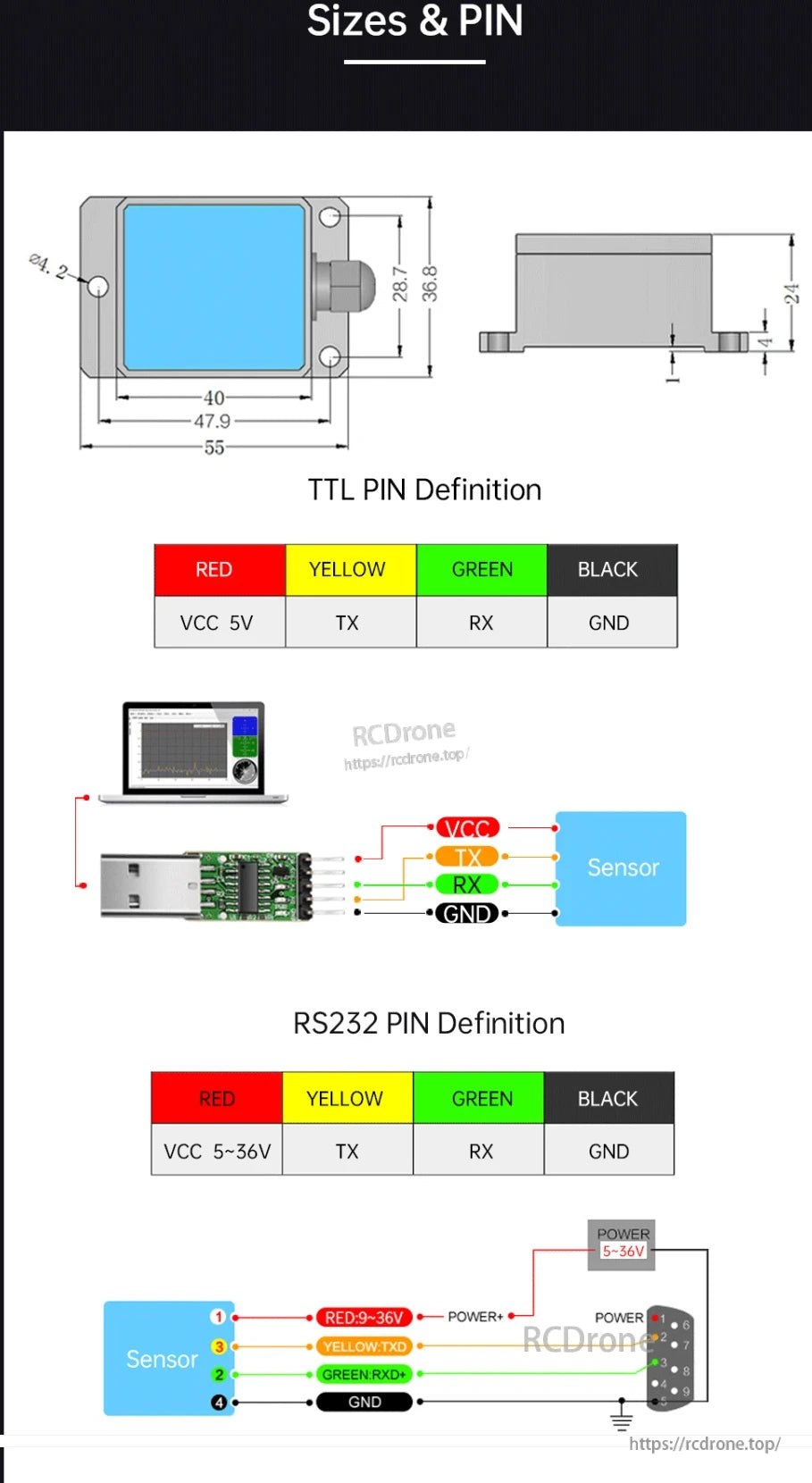
Akcelerometr WitMotion HWT901B ma wymiary 55mm x 47.9mm x 36.8mm z otworem montażowym o średnicy 4.2mm. Posiada konfiguracje pinów TTL i RS232: czerwony (VCC, 5V lub 5-36V), żółty (TX), zielony (RX) i czarny (GND). Schematy połączeń pokazują, jak podłączyć czujnik do modułu USB i źródła zasilania. Interfejs RS232 akceptuje zasilanie 5-36V, z oznaczonymi pinami dla zasilania, TXD, RXD i masy. Laptop jest dołączony do zestawu do monitorowania danych.
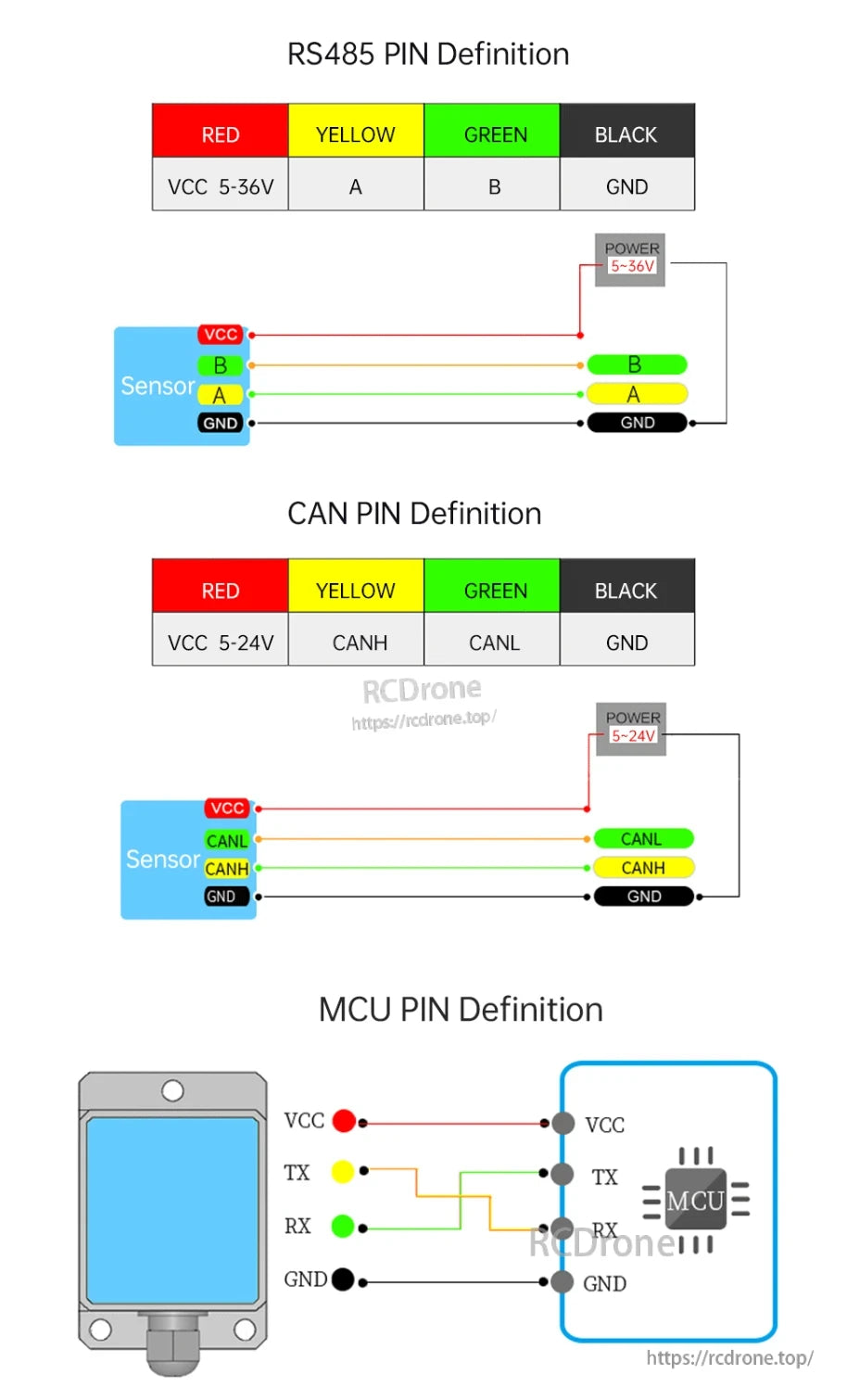
Definicje pinów dla interfejsów RS485, CAN i MCU są szczegółowo opisane. RS485 używa czerwonego (VCC 5–36V), żółtego (A), zielonego (B) i czarnego (GND). CAN używa czerwonego (VCC 5–24V), żółtego (CANH), zielonego (CANL) i czarnego (GND).Sekcja MCU pokazuje połączenia VCC, TX, RX i GND do czujnika. Przewody w kolorach odpowiadających łączą zasilanie, dane i masę. Każde złącze wymienia zakresy napięcia i funkcje sygnałów do integracji z czujnikami i mikrokontrolerami.

WitMotion HWT901B Akcelerometr z kablem, oznaczony VCC, RX, TX, GND oraz przewodami w kolorach odpowiadających.

Related Collections






