




WitMotion SINDT Dwuosiowy czujnik nachylenia AHRS, Akcelerometr+Żyroskop+Kwaternion, 0,05° XY, 0–±90°, 200 Hz, IP67, RS232/RS485/TTL
WitMotion SINDT Dwuosiowy czujnik nachylenia AHRS, Akcelerometr+Żyroskop+Kwaternion, 0,05° XY, 0–±90°, 200 Hz, IP67, RS232/RS485/TTL
WitMotion
Nie można załadować gotowości do odbioru
Overview
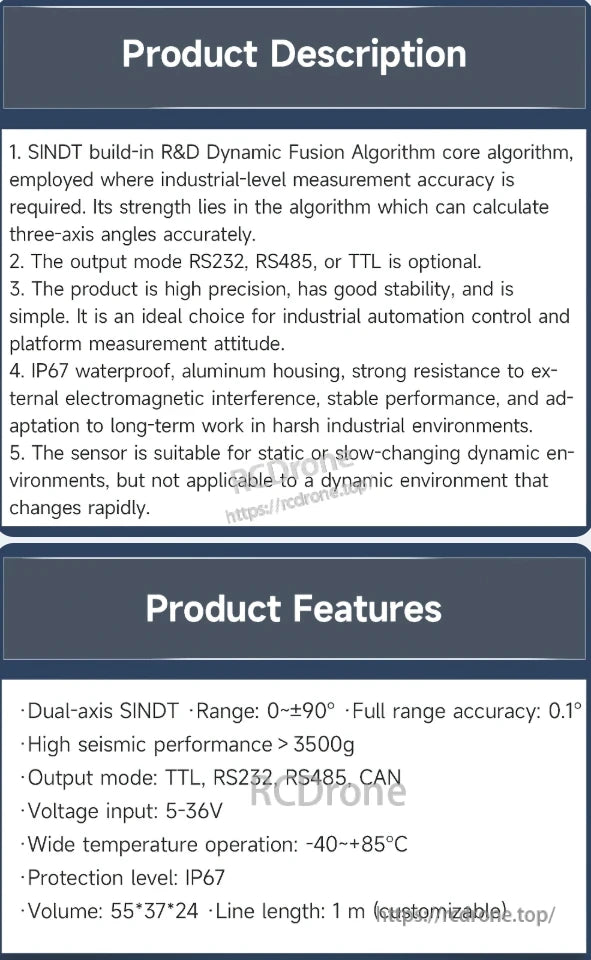
WitMotion SINDT to przemysłowy czujnik nachylenia w podwójnej osi / inklinometr AHRS, zbudowany wokół MPU6050 IMU z wbudowanym algorytmem fuzji Kalman. Mierzy kąty osi X i Y, jednocześnie dostarczając dane o przyspieszeniu w 3 osiach, prędkości kątowej, danych o orientacji magnetycznej/quaternion. Urządzenie wykorzystuje obudowę aluminiową z uszczelnieniem IP67 i jest dostarczane z darmowym oprogramowaniem na PC do konfiguracji, wizualizacji i rejestrowania. Zaprojektowane do długoterminowego użytkowania w trudnych warunkach, obsługuje interfejsy TTL/RS232/RS485 (CAN opcjonalnie) oraz szeroki zakres zasilania 5–36 V.
Kluczowe cechy
-
Podwójna oś nachylenia (SINDT), zakres: 0~±90°; dokładność statyczna: 0.05°, dokładność dynamiczna: 0.1°
-
Dane wyjściowe: 3-osiowy akcelerometr, 3-osiowy żyroskop, kwaternion, kąt 2-osiowy (pitch/roll)
-
Interfejsy wyjściowe: TTL, RS232, RS485 (CAN pokazany jako opcjonalny)
-
Prędkość transmisji danych / odpowiedź częstotliwościowa: Odpowiedź DC, 0.2–200 Hz
-
Rozdzielczość: 0.01° (szerokość pasma 5 Hz)
-
Dryft zerowy temperatury: ±0.01°/°C; Współczynnik temperaturowy ≤150 ppm°/°C
-
Wzmocniony: Obudowa aluminiowa, IP67, kabel odporny na olej/zużycie/szeroki zakres temperatur
-
Wysoka wydajność sejsmiczna: >3500 g; odporność na wibracje: 10 grms, 10–1000 Hz
-
Szybka reakcja: 0.01 s; czas włączenia: 0.2 s
-
Moc: 5–36 V wejście (tabela specyfikacji podaje 9–36 V limity); typowe 60 mA
-
Darmowe oprogramowanie na PC; przykładowe programy dla STM32, biblioteka szeregowa Arduino oraz routines szeregowe 51-MCU
Zastosowania
Platformy podnoszące • Dźwigi wieżowe • Obrotowe stoły nachyleniowe • Strojenie podwozi samochodowych • Sprzęt medyczny • Monitorowanie nachylenia paneli słonecznych
Specyfikacje (na podstawie zdjęć produktu)
Wydajność
| Przedmiot | Stan | Wartość |
|---|---|---|
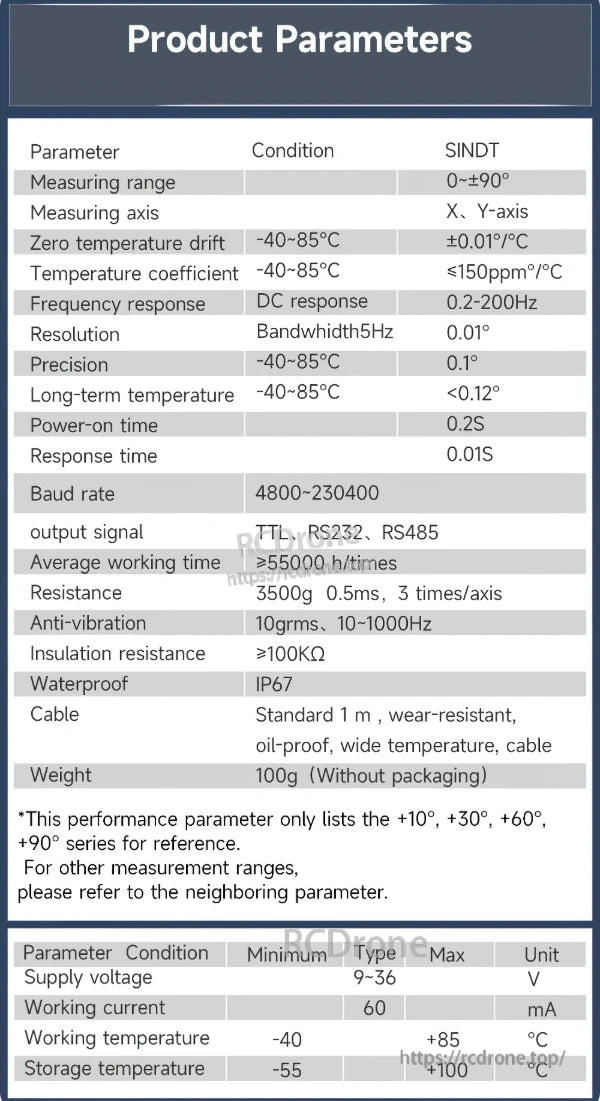
| Zakres pomiarowy | — | 0~±90° |
| Osie pomiarowe | — | X, Y |
| Rozdzielczość | Pasmo 5 Hz | 0.01° |
| Precyzja | −40~+85 °C | 0.1° |
| Dokładność statyczna | — | 0.05° |
| Dokładność dynamiczna | — | 0.1° |
| Pasmo przenoszenia | DC | 0.2–200 Hz |
| Czas reakcji | — | 0.01 s |
| Czas włączenia | — | 0.2 s |
| Dryft zerowy temperatury | −40~+85 °C | ±0.01°/°C |
| Współczynnik temperatury | −40~+85 °C | ≤150 ppm°/°C |
| Długoterminowa temperatura | −40~+85 °C | <0.12° |
Wiarygodność &i Środowisko
| Przedmiot | Wartość |
|---|---|
| Odporność sejsmiczna | 3500 g, 0.5 ms, 3 razy/osi |
| Antywibracyjny | 10 grms, 10–1000 Hz |
| Opór izolacji | ≥100 kΩ |
| Wodoodporny | IP67 |
| Średni czas pracy | ≥55 000 h/razy |
| Temperatura pracy | −40~+85 °C |
| Temperatura przechowywania | −55~+100 °C |
Elektrotechnika
| Pozycja | Min | Typ | Max | Jednostka |
|---|---|---|---|---|
| Napięcie zasilania* | 9 | — | 36 | V |
| Prąd roboczy | — | 60 | — | mA |
| *Schematy okablowania pokazują 5–36 V akceptowalne na VCC. |
Interfejs &i komunikacja
| Element | Wartość |
|---|---|
| Sygnały wyjściowe | TTL, RS232, RS485 (CAN wymieniony w funkcjach) |
| Prędkość baud | 4800–230400 bps |
Mechaniczne
| Element | Wartość |
|---|---|
| Obudowa | Aluminium, czarny |
| Wymiary | 55 × 37 × 24 mm (rysunek pokazany) |
| Waga | ≈100 g (bez opakowania) |
| Kabel | Standard 1 m, odporny na zużycie/olej/szeroki zakres temperatur (długość do dostosowania) |
Okablowanie &i Pinout (według kodu kolorów)
TTL (5–36 V):
-
CZERWONY: VCC, ŻÓŁTY: TX, ZIELONY: RX, CZARNY: GND
RS232 (5–36 V):
-
CZERWONY: VCC, ŻÓŁTY: 232TX, ZIELONY: 232RX, CZARNY: GND
RS485 (5–36 V):
-
CZERWONY: VCC, ŻÓŁTY: A, ZIELONY: B, CZARNY: GND
Schematy okablowania MCU są dostępne na obrazach.
Uwagi dotyczące instalacji
-
Zamontuj na płaskiej, gładkiej, sztywnej powierzchni odniesienia; unikaj przechyłu między podstawą czujnika a mierzona powierzchnią.
-
Utrzymuj oś czujnika równolegle do mierzony osi (patrz rysunki).
-
Nieprawidłowe zamocowanie (pochylona podstawa lub niewłaściwe wyrównanie osi) wprowadza błąd kątowy.
W zestawie / Oprogramowanie
-
Czujnik inklinometr SINDT z kablem 1 m
-
Oprogramowanie WitMotion PC (darmowe pobranie)
-
Przykładowy kod: STM32, szeregowy Arduino, szeregowy 51-MCU
Uwaga: Produkt nie dostarcza schematycznego kodu źródłowego (jak pokazano).
Szczegóły

Czujnik nachylenia w podwójnej osi z wbudowanym algorytmem fuzji filtru Kalman do pomiaru poziomu, nachylenia i kąta. Posiada aluminiową obudowę i klasę wodoodporności IP67. Zawiera darmowe oprogramowanie WITMOTION na PC do uproszczonego rozwoju. Dokładność statyczna: 0,05°, dokładność dynamiczna: 0,1°. Czujnik obsługuje pomiary osi X i Y, wyświetlane za pomocą przyjaznego interfejsu na laptopie. Zaprojektowany do precyzyjnego monitorowania kątowego w różnych zastosowaniach.
WitMotion Inklinometr SINDT oferuje pomiar w dwóch osiach z dokładnością 0,1°, ochroną IP67 i wieloma opcjami wyjścia. Działa w zakresie 5-36V, wytrzymuje ekstremalne temperatury i radzi sobie z wstrząsami do 3500g.
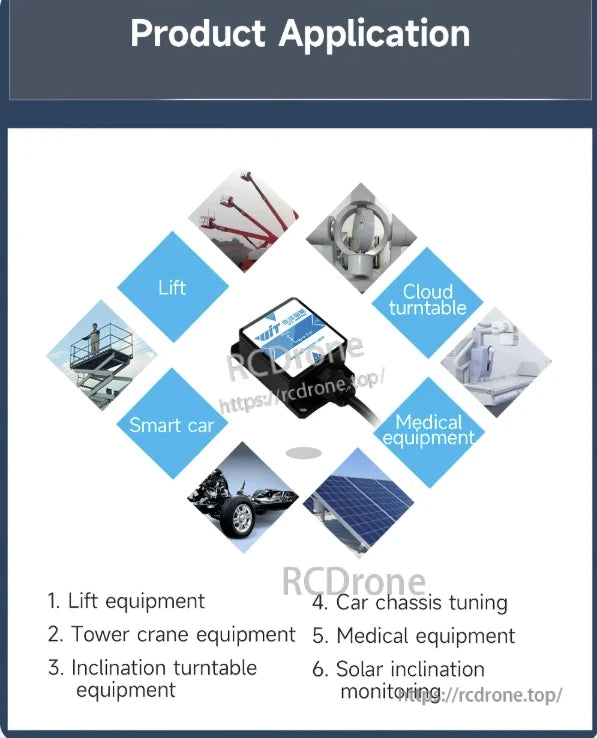
Inklinometr WitMotion SINDT stosowany w windach, dźwigach, obrotowych stołach, inteligentnych samochodach, medycynie i monitorowaniu energii słonecznej.
WitMotion SINDT inclinometr oferuje zakres ±90°, precyzję 0,1°, rozdzielczość 0,01°, ocena IP67. Obsługuje TTL, RS232, RS485. Działa w temperaturze od -40°C do +85°C, waży 100g.

Zapewnij prawidłową instalację czujnika nachylenia, aby zapobiec błędom pomiarowym. Utrzymuj ciasny, gładki i stabilny kontakt z równoległym wyrównaniem osi. Niewłaściwe zamocowanie prowadzi do nieścisłości kątowych — zapoznaj się z rysunkami w celu prawidłowego ustawienia.

Przykładowe programy dla STM32, Arduino i procedur portu szeregowego; brak dostarczonego kodu źródłowego schematu.
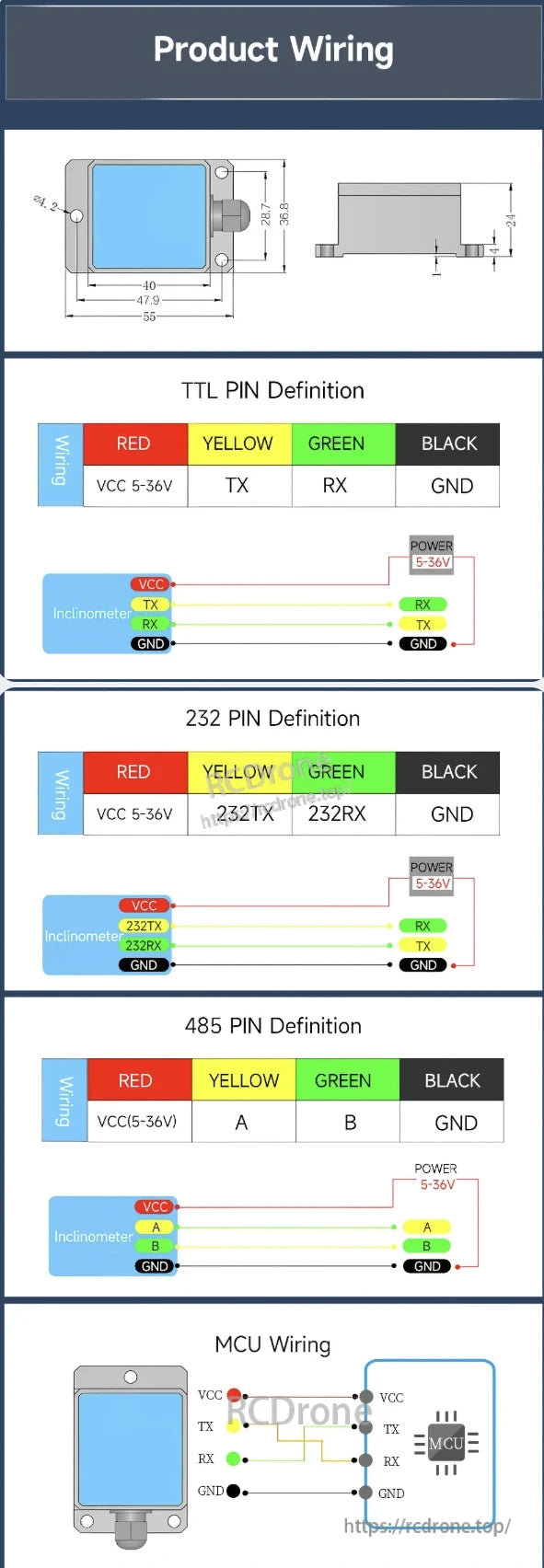
Diagram okablowania WitMotion SINDT Inclinometer obejmuje połączenia TTL, 232, 485 i MCU. Przewody oznaczone kolorami (czerwony, żółty, zielony, czarny) definiują VCC, TX, RX, GND, A, B dla różnych interfejsów z zakresem zasilania 5-36V.

Related Collections




