WitMotion WT1-IMU Dwukanałowy czujnik kąta (akcelerometr + inklinometr), 3.3–5V TTL, dokładność 0,5°, częstotliwość 20 Hz
WitMotion WT1-IMU Dwukanałowy czujnik kąta (akcelerometr + inklinometr), 3.3–5V TTL, dokładność 0,5°, częstotliwość 20 Hz
WitMotion
Nie można załadować gotowości do odbioru
Overview
WitMotion WT1-IMU to bardzo opłacalny czujnik kąta w podwójnej osi, który łączy dane z akcelerometru/żyroskopu/magnetometru z algorytmem opartym na filtrze Kalman'a, aby w czasie rzeczywistym wyjściować kąt X/Y. Moduł działa w zakresie 3.3–5 V, komunikuje się przez TTL serial i jest zbudowany na kompaktowej płytce PCB pokrytej złotem, co ułatwia integrację SMT. Typowa dokładność kąta wynosi ±0.5° (X & Y) z domyślną częstotliwością zwrotu 20 Hz. Oficjalne oprogramowanie na PC oferuje pulpity, kalibrację, rejestrowanie i eksport; SDK/przykłady wspierają MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino i C/C#.
Key Features
-
Wyjście kąta w podwójnej osi (X, Y) do pomiaru postawy/pochylenia
-
Filtr Kalman'a + algorytm fuzji WitMotion dla wysokiej stabilności
-
Zasilanie: 3.3–5 V, TTL UART; LDO wbudowany
-
Dokładność: ±0.5° (X &i Y)
-
Zakres kątowy: X ±180°, Y ±90°
-
Domyślny wskaźnik zwrotu: 20 Hz (konfigurowalne w oprogramowaniu)
-
Zużycie prądu: typ. ~5 mA, <10 mA
-
Kompleksowy 15.24 × 15.24 mm moduł; złocone otwory stemplowe
-
Bezpłatne oprogramowanie na PC: pulpit nawigacyjny, kalibracja, ustawienia pasma/prędkości, rejestrowanie danych &i odtwarzanie, eksport do TXT/BIN/PLAY/XLS
-
Akcesoria/uchwyty: opcjonalny adapter USB do TTL i uchwyt do testowania do łatwego uruchamiania
Specyfikacje
| Przedmiot | Wartość |
|---|---|
| Model | WT1-IMU |
| Napięcie | 3.3–5 V |
| Interfejs | TTL UART |
| Zawartość wyjścia | Kąt 2-osiowy (X, Y) |
| Zakres kątów | X: ±180°;Y: ±90° |
| Dokładność kątowa | X/Y: ±0.5° |
| Domyślny wskaźnik zwrotu | 20 Hz |
| Prędkość baud | 9600 (domyślnie 20 Hz wyjścia) |
| Prąd | typ. 5 mA; <10 mA |
Wymiary &i osie
| Rozmiar (mm) | Wartość |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (wysokość) | 2 |
Definicja osi: X w prawo, Y w górę, Z na zewnątrz od płytki; rotacja zgodna z regułą prawej ręki.
Rozkład pinów (12-pinowy otwór stempla)
| Nr | Pin | Funkcja |
|---|---|---|
| 1 | D0 | NC (zarezerwowany) |
| 2 | VCC | 3.3–5 V wejście |
| 3 | RX | Dane szeregowe wejście (TTL) |
| 4 | TX | Dane szeregowe wyjście (TTL) |
| 5 | GND | Uziemienie |
| 6 | SWIM | Interfejs danych SWIM |
| 7 | D3 | NC (zarezerwowane) |
| 8 | GND | Uziemienie |
| 9 | SDA | NC (zarezerwowane) |
| 10 | SCL | NC (zarezerwowane) |
| 11 | VCC | 3.3–5 V wejście |
| 12 | D2 | NC (zarezerwowane) |
Połączenie MCU: TTL szeregowe; krzyżowe połączenie TX↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC i GND wspólne.
Oprogramowanie &i rozwój
-
Panel sterowania: na żywo widok kąta, przyspieszenia, prędkości kątowej, pola magnetycznego, kwaternionu itp.
-
Menu konfiguracji: kalibracja przyspieszenia &i magnetyczna, kierunek umiejscowienia, częstotliwość/widmo wyjściowe, prędkość transmisji, tryb uśpienia.
-
Nagrywanie/eksport: szybkie rejestrowanie i eksport do TXT/BIN/PLAY lub wklejanie do Excel (XLS).
-
Narzędzia: przykłady/SDK dla MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#.
-
Opcjonalny uchwyt do testowania do błyskawicznego programowania/uruchamiania.
Typowe zastosowania
Wyświetlacz montowany na głowie, śledzenie ruchu, robotyka, AGV/UGV, bezzałogowe prowadzenie, monitorowanie postawy w górnictwie/wieżach/przemyśle, sprzęt automatyzacyjny, badania i rozwój w lotnictwie załogowym R&&D, monitorowanie bezpieczeństwa oraz inteligentne/zautomatyzowane farmy.
Szczegóły

Czujnik kąta w podwójnej osi, opłacalny, stabilny, z algorytmem filtru Kalmana, certyfikowany ISO9001.
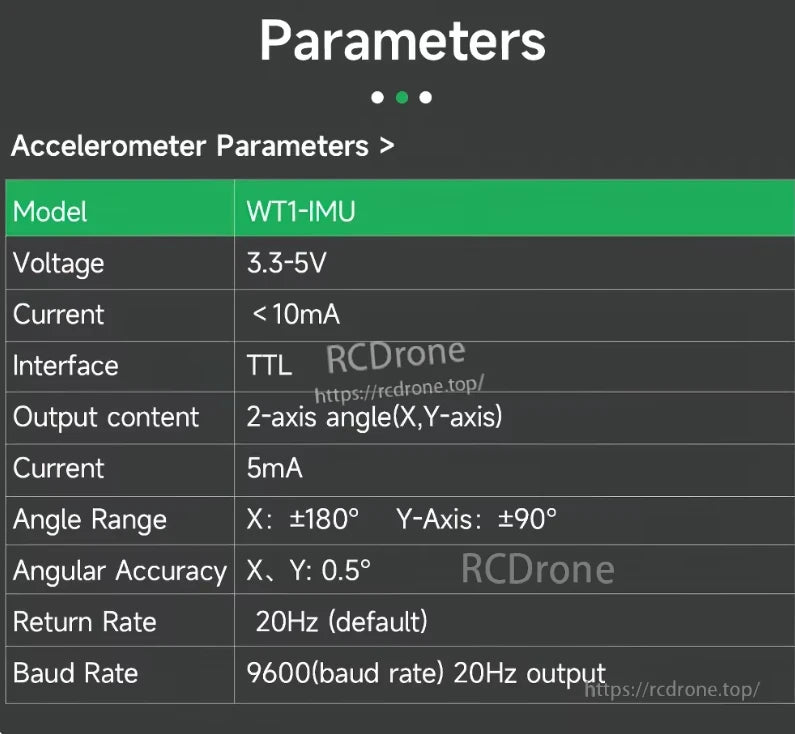
WT1-IMU akcelerometr działa przy 3.3-5V, <10mA prąd, interfejs TTL. Wyjścia kątów 2-osiowych (X: ±180°, Y: ±90°) z dokładnością 0.5°. Domyślny wskaźnik zwrotu 20Hz, prędkość baud 9600.
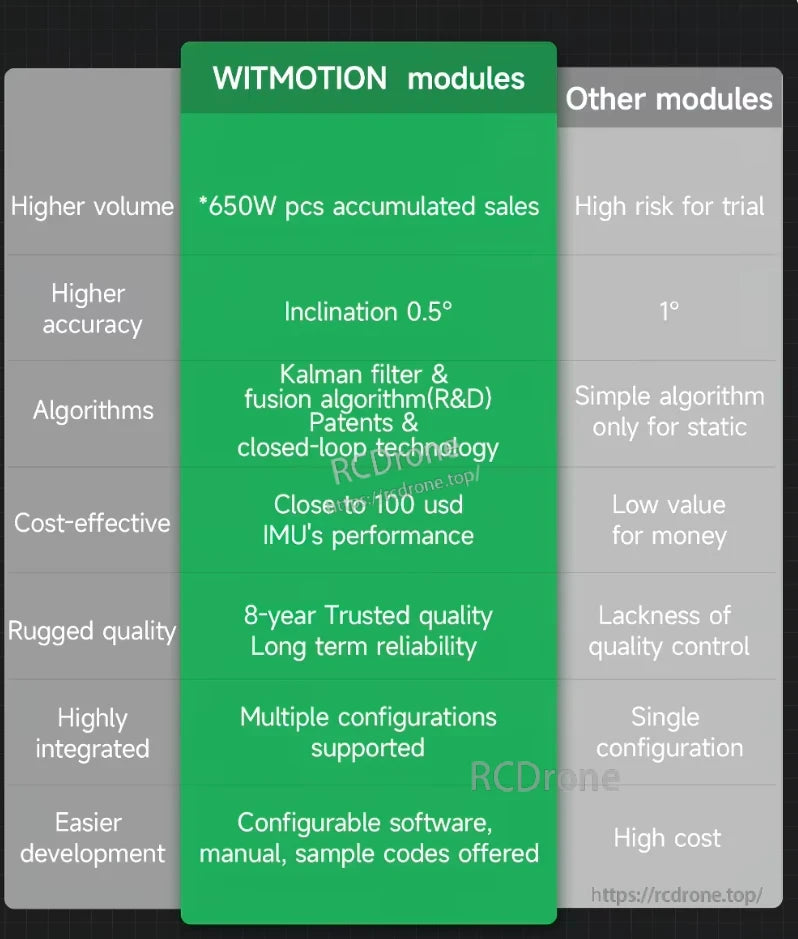
Moduły WitMotion zapewniają dużą objętość, dokładność i opłacalność dzięki solidnej konstrukcji, wielu konfiguracjom i łatwemu rozwojowi. Oferują sprzedaż 650W, nachylenie 0,5°, filtr Kalman, technologię zamkniętej pętli oraz konfigurowalne oprogramowanie. Inne moduły oferują niższą wydajność, mniej funkcji i wyższe ryzyko.
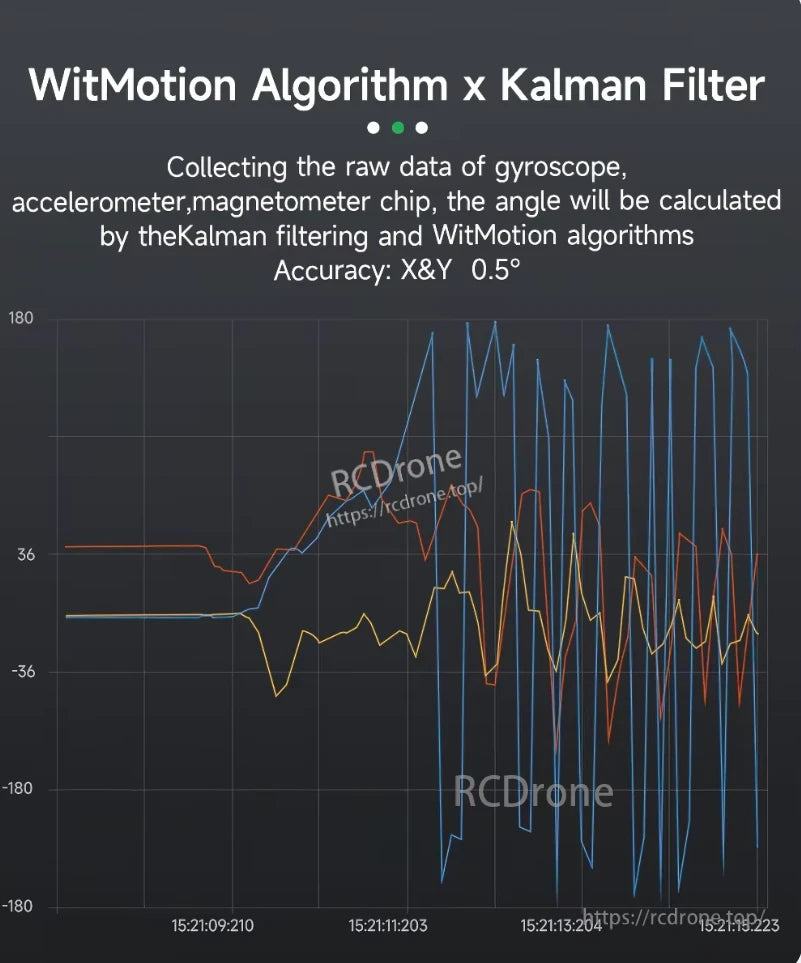
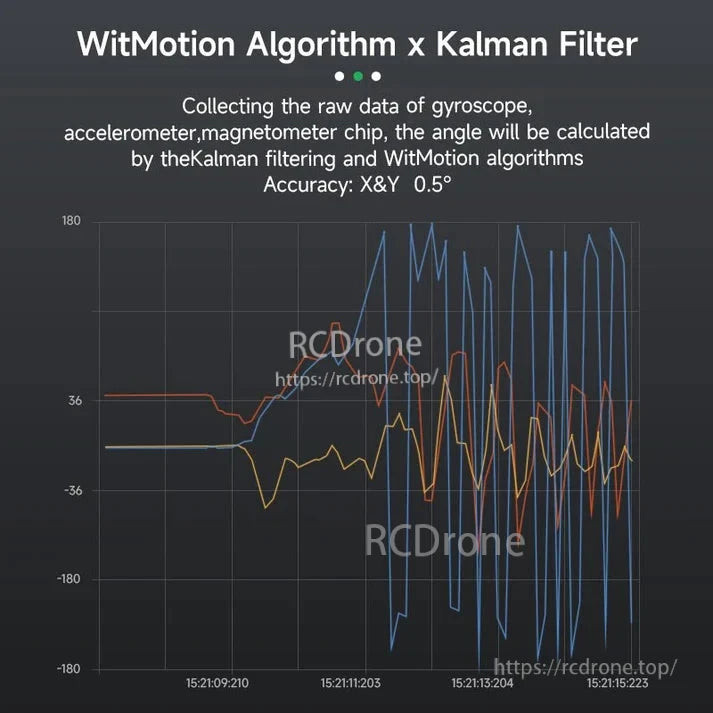
Algorytm WitMotion x Filtr Kalman. Zbiera surowe dane z żyroskopu, akcelerometru, magnetometru. Oblicza kąt za pomocą filtracji Kalman i algorytmów WitMotion. Dokładność: X&Y 0,5°.
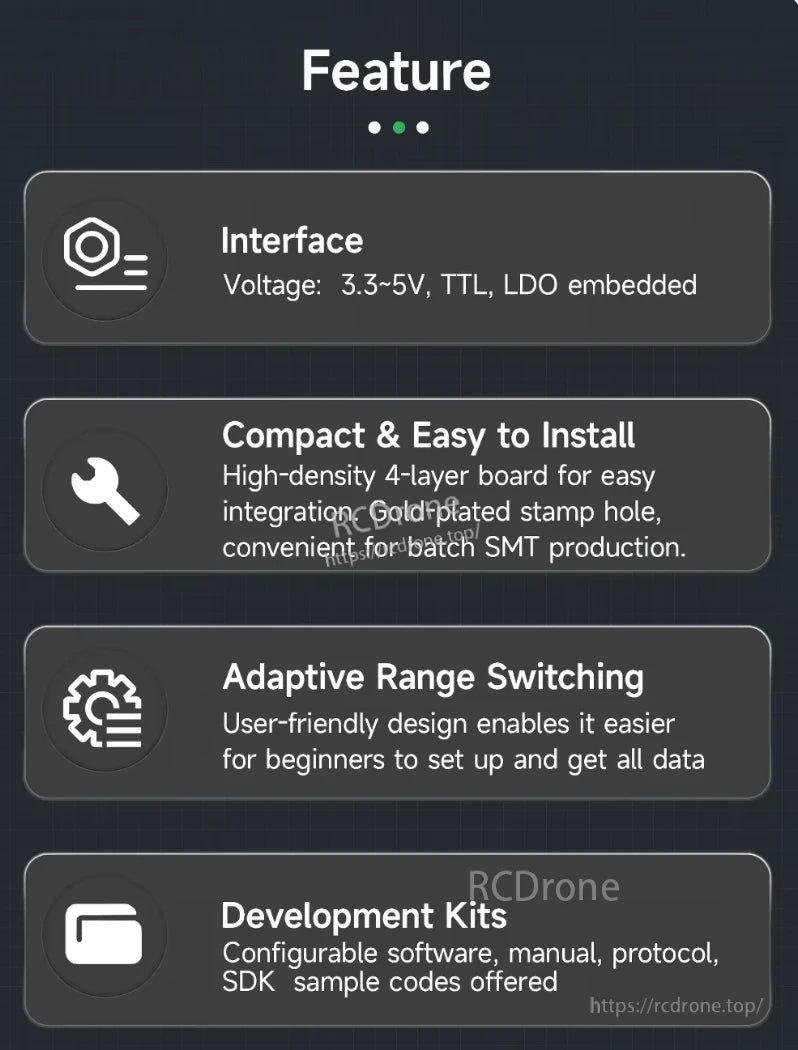
Interfejs: 3.3~5V, TTL, LDO wbudowane. Kompaktowy & łatwy w instalacji z wysokodensyjną 4-warstwową płytką i złoconymi otworami stemplowanymi. Adaptacyjne przełączanie zakresu dla początkujących. Zestawy deweloperskie zawierają oprogramowanie, podręcznik, protokół, SDK i przykładowe kody.
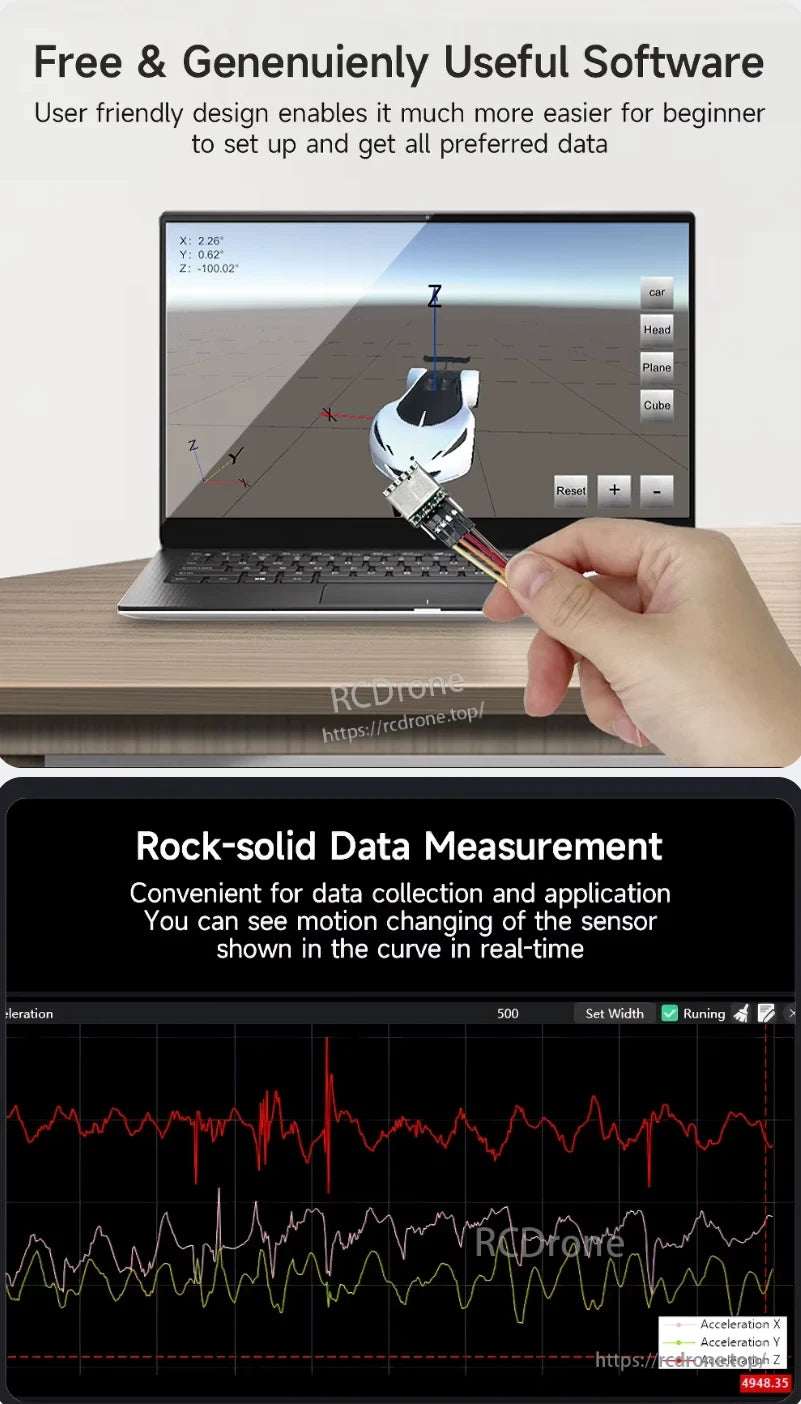
Bezpłatne &i naprawdę przydatne oprogramowanie oferuje przyjazny dla użytkownika design, co ułatwia konfigurację i pobieranie danych. Śledzenie ruchu w czasie rzeczywistym z solidnym pomiarem danych wyświetla zmiany przyspieszenia w osiach X, Y, Z za pomocą dynamicznych krzywych.
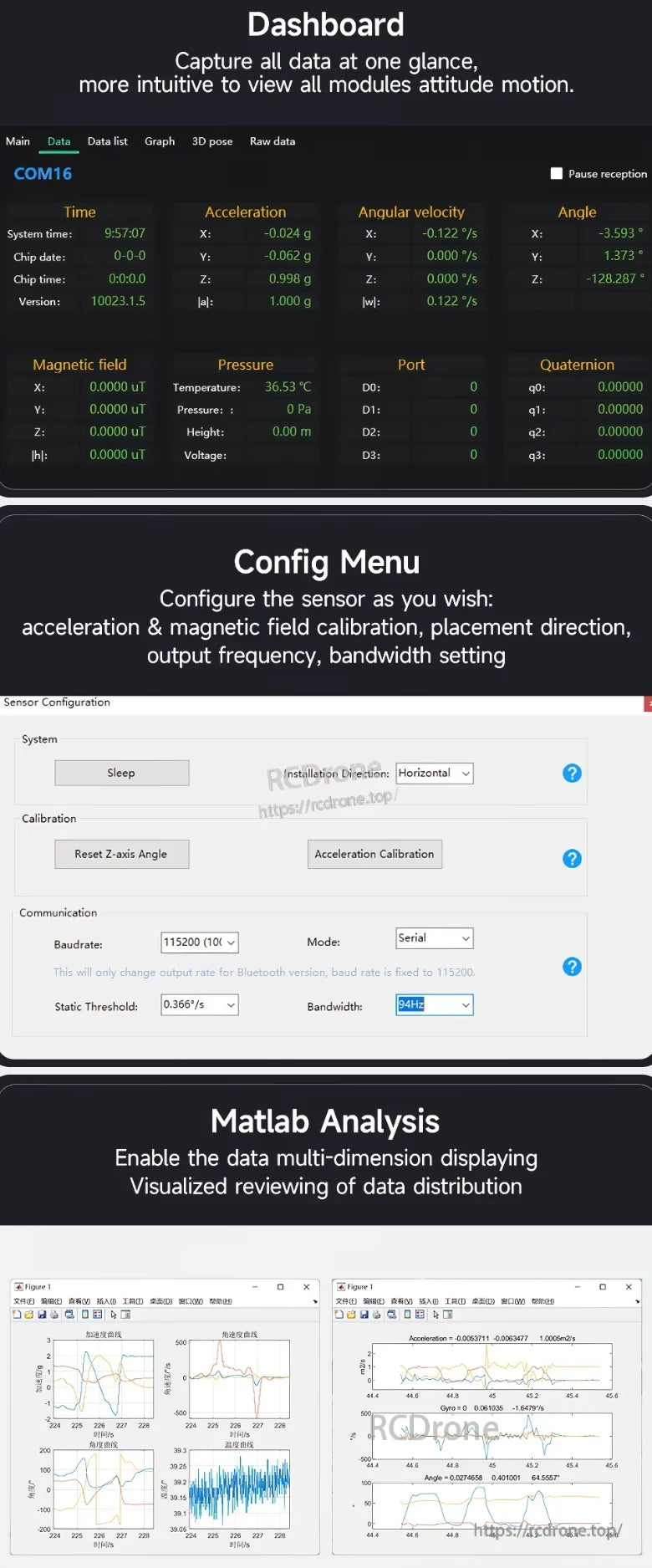
Panel sterowania wyświetla dane czujników w czasie rzeczywistym, w tym przyspieszenie, prędkość kątową, kąt, pole magnetyczne, ciśnienie i kwaternion. Menu konfiguracji umożliwia kalibrację, kierunek instalacji, ustawienia prędkości transmisji i pasma. Analiza w Matlabie umożliwia wizualizację danych w wielu wymiarach.
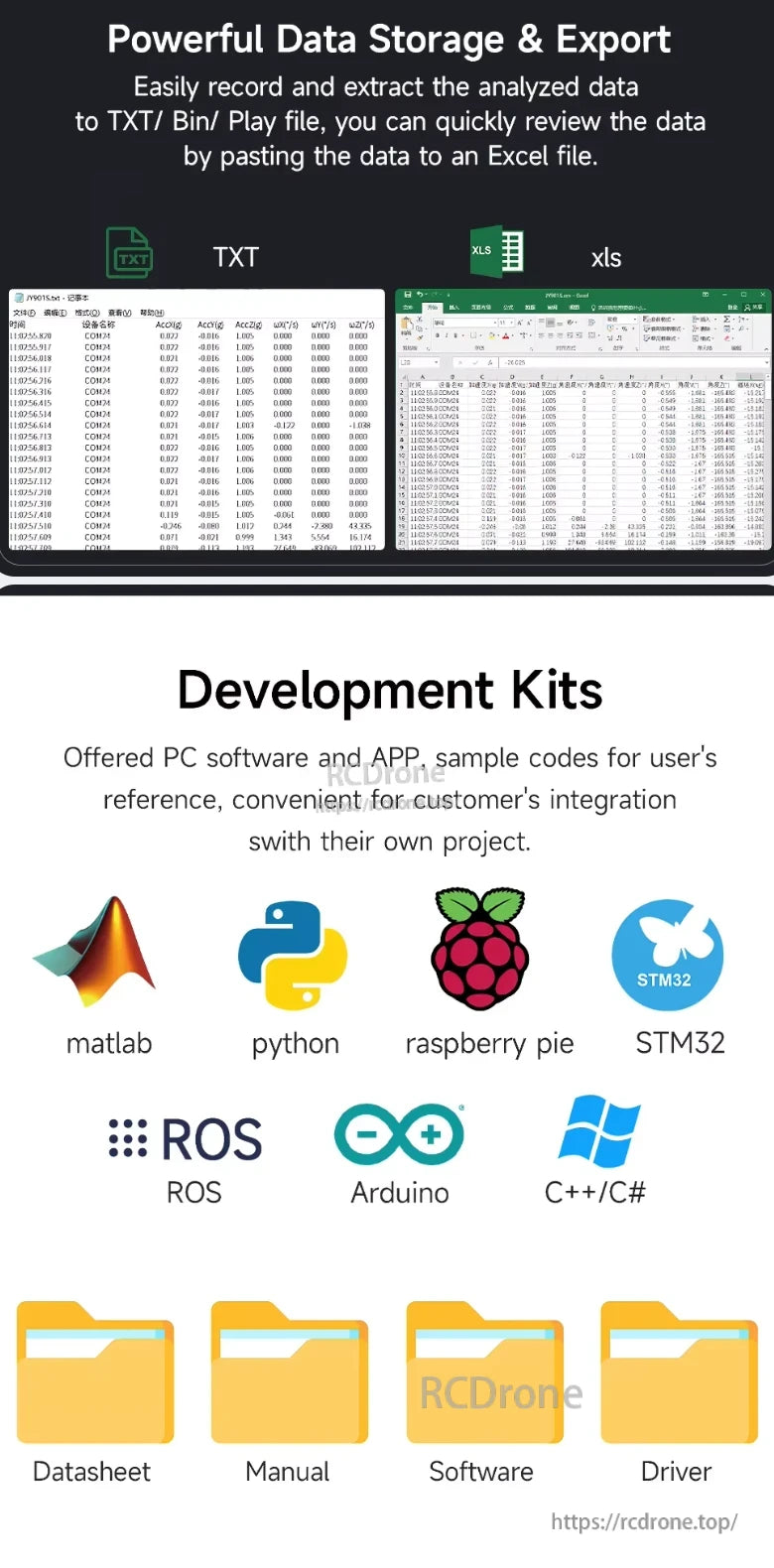
Potężne przechowywanie danych i eksport do plików TXT, BIN lub Play; kompatybilne z MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#. Zawiera kartę katalogową, podręcznik, oprogramowanie i sterownik dla łatwej integracji.
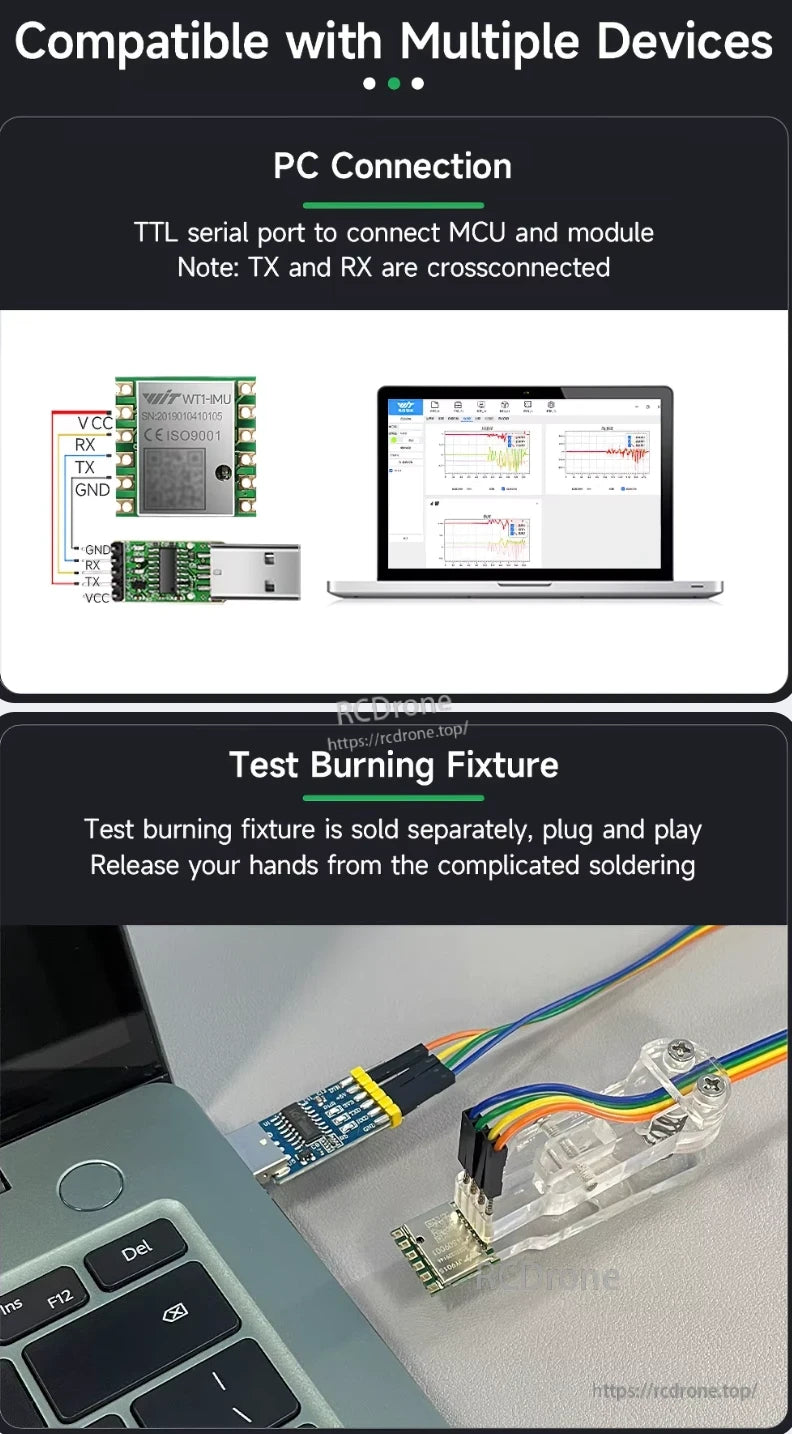
WitMotion WT1-IMU obsługuje połączenie z komputerem za pośrednictwem portu szeregowego TTL z krzyżowo połączonymi TX i RX.Kompatybilny z wieloma urządzeniami. Testowy uchwyt do palenia sprzedawany osobno, plug and play dla łatwej konfiguracji bez lutowania.
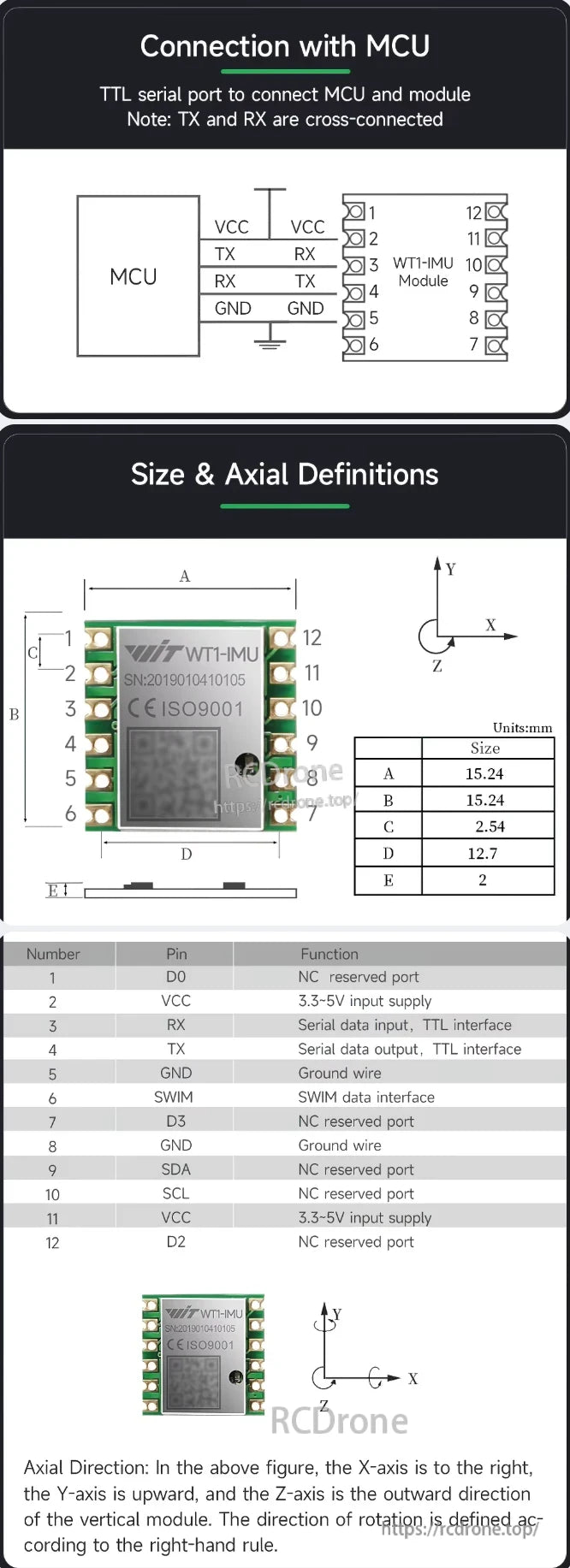
WitMotion WT1-IMU czujnik kąta w podwójnej osi oferuje połączenie szeregowe TTL, układ 12-pinowy, kompaktowy rozmiar 15.24×15.24×2.54 mm, osie zgodne z regułą prawej ręki i zawiera piny VCC, GND, TX, RX, SWIM, SDA, SCL.

Aplikacje czujnika IMU: górnictwo, rolnictwo, robotyka, wieże, automatyzacja, drony, śledzenie, monitorowanie.
Related Collections