WitMotion WT61 IMU (MPU6050) – 6-osiowy akcelerometr + żyroskop z wyjściem kąta, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V do Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – 6-osiowy akcelerometr + żyroskop z wyjściem kąta, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V do Arduino/Raspberry Pi/PC
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
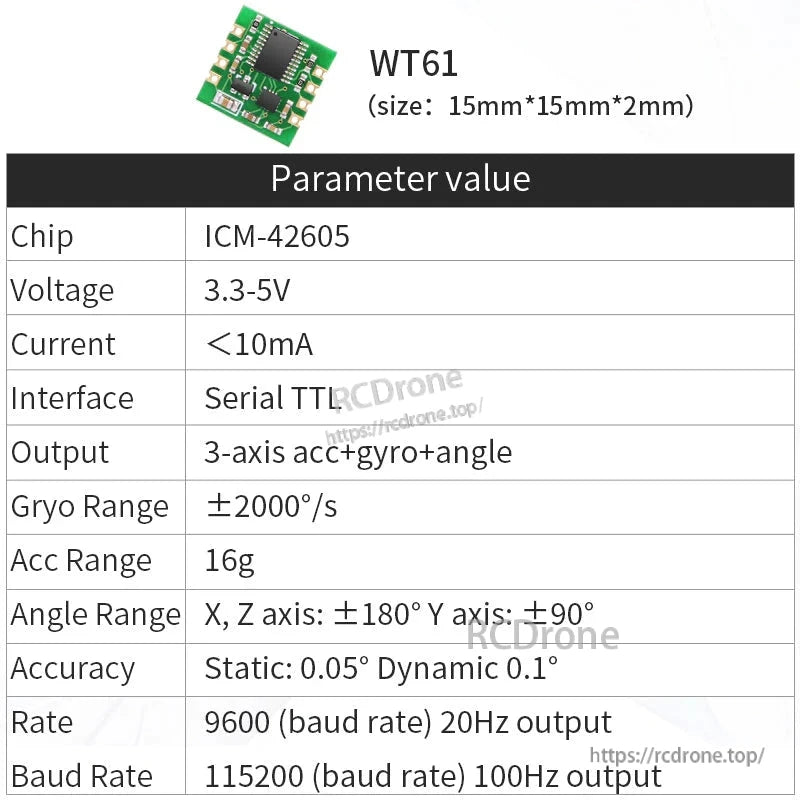
WitMotion WT61 to czujnik postawy MEMS 6-osiowy, który wyjmuje 3-osiowe przyspieszenie, 3-osiową prędkość kątową oraz skumulowany kąt (roll/pitch/yaw). Wykorzystuje 48 MHz MCU z wbudowanym IMU (MPU6050, zgodnie z nazwą modelu) oraz dynamiczną fuzję WitMotion + filtrację Kalman, aby zapewnić wysoką stabilność, niski poziom szumów i precyzyjne wyniki kątowe. Moduł komunikuje się za pomocą Serial TTL i jest mały (15,24 × 15,24 × 2 mm, ~1 g), co ułatwia jego osadzenie w urządzeniach IoT, robotach, maszynach mobilnych, monitorowaniu strukturalnym, elektronice użytkowej i gadżetach VR.
Kluczowe cechy
-
3 wyjścia: przyspieszenie, prędkość kątowa i kąt (postawa).
-
Algorytm fuzji: dynamiczna fuzja + filtracja Kalman; dziedzictwo algorytmu postawy klasy satelitarnej; dokładność kąta 0,05° (statyczna), 0,1° (dynamiczna).
-
Wysokiej jakości sprzęt: 48 MHz rdzeń MCU, stabilny chip zasilający, miedź zanurzona w złocie, wbudowany czujnik MEMS.
-
Małe & światło: 15.24 × 15.24 × 2 mm, ~1 g; wsparcie dla montażu poziomego/pionowego.
-
Wybieralne prędkości transmisji & baud: 20 Hz / 100 Hz wskaźnik zwrotu; 9600 / 115200 bps.
-
Aplikacja na Androida + oprogramowanie na Windows: wykresy w czasie rzeczywistym, nagrywanie, widok surowych danych, eksport TXT, przeglądarka demonstracyjna 3D oraz bogata konfiguracja (szerokość pasma, wskaźnik wyjścia, umiejscowienie, progi, tryb uśpienia, reset osi Z).
-
Przykłady SDK &: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Narzędzia dokumentacyjne &: karta katalogowa, podręcznik, MiniIMU.exe, sterowniki CH340/CP2102, filmy demonstracyjne.
-
Wsparcie & jakości: raport kalibracji fabrycznej pokazany; RoHS, CE, ISO 9001.
Specyfikacje techniczne
| Przedmiot | Szczegóły |
|---|---|
| Model / Marka | WT61 / WitMotion |
| Napięcie zasilania | 3.3 V ~ 5 V |
| Prąd | < 10 mA |
| Interfejs | Serial TTL |
| Zawartość wyjścia | przyspieszenie 3-osiowe, prędkość kątowa 3-osiowa, kąt |
| Zakres przyspieszenia | ±2/±4/±8/±16 g (adaptacyjny) |
| Zakres żyroskopu | ±2000 °/s |
| Zakres kąta | X, Z: ±180°; Y: ±90° |
| Dokładność kąta | X/Y statyczny 0.05°; dynamiczny 0.1° |
| Stabilność (błąd) | Przyspieszenie: 0.01 g; Żyroskop: 0.05 °/s; Kąt (XY): 0.01° |
| Wskaźnik zwrotu | 20 Hz / 100 Hz |
| Prędkość Baud | 9600 / 115200 bps |
| Rozdzielczość przyspieszenia | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Rozmiar / Waga | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Temperatura pracy | –40 °C do +85 °C |
| Definicja osi | Współrzędne kartezjańskie, zasada prawej ręki |
| Montaż | Poziomy lub pionowy |
Pinout & Mechaniczny
Kontur płytki (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Piny:
| # | Nazwa | Funkcja |
|---|---|---|
| 1 | D0 | NC zarezerwowane |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Dane szeregowe wejście, poziom TTL |
| 4 | TX | Dane szeregowe wyjście, poziom TTL |
| 5 | GND | Uziemienie |
| 6 | SWIM | Interfejs danych SWIM |
| 7 | D2 | NC zarezerwowane |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC zarezerwowane |
| 10 | SDA | NC zarezerwowane |
| 11 | GND | Uziemienie |
| 12 | D3 | NC zarezerwowane |
Okablowanie MCU (pokazany schemat): TTL szeregowy do hosta MCU z TX↔RX połączeniem krzyżowym (VCC, TX, RX, GND).
Oprogramowanie, Aplikacje & Narzędzia
-
Aplikacja na Androida: połączenie przez USB-do-TTL + OTG telefonu; wykresy w czasie rzeczywistym dla Acc/Gyro/Kąt; Przycisk nagrywania; menu modułów (3-osiowy / 6-osiowy / 9-osiowy / BLE5.0 / WT901-WIFI); bogate Strony konfiguracji (kalibracja akcelerometru, kierunek instalacji, częstotliwość pobierania, pasmo pomiarowe, próg detekcji statycznej, wybór wzorca).
-
Windows PC (MiniIMU.exe): wskaźniki postawy na żywo, krzywe w czasie rzeczywistym („Solidne pomiary danych”), Przechowywanie danych & Eksport (surowe i przetworzone dane do formatu TXT/CSV), Menu konfiguracji (baudrate 115200, tryb=Serial, wybór kierunku, pasmo e.g. , 94 Hz, uśpienie, reset Z-osi do 0°).
-
Demo 3D: wizualizuje ruch czujnika; oferowany kod źródłowy 3D (jak wskazano).
-
Uchwyt testowy: opcjonalny uchwyt typu plug-and-play do okablowania bez lutowania (sprzedawane osobno).
Algorytmy & Wydajność
-
Algorytm WitMotion × Filtr Kalman: opracowany na podstawie metod określania postawy satelitów w lotnictwie ; łączy fuzję kinetyczną, filtrację cyfrową, estymację stanu; dostarcza podaną 0.05°/0.1° dokładność kąta i doskonała stabilność odchylenia/niskie szumy (wykres i odznaki pokazane).
Typowe zastosowania
Urządzenia IoT, monitorowanie środowiska, ochrona struktury budynku, robotyka & automatyzacja, ropa & energia, maszyny mobilne , przemysł wydobywczy, elektronika użytkowa, gadżety VR.
Zgodność & Wsparcie
-
Certyfikaty pokazane: Raport kalibracji, RoHS, CE, ISO 9001.
-
Notatki porównawcze: testowane fabrycznie przed wysyłką, dostępne SDK, 12-miesięczna gwarancja, dożywotnie wsparcie techniczne od WitMotion R&D.
Notatki & Akcesoria
-
W zestawie: moduł WT61.
-
Opcjonalnie: konwerter USB do TTL, adapter OTG do telefonu, akrylowy uchwyt testowy zacisk.
-
Użyj układu współrzędnych praworęcznych i postępuj zgodnie z kierunkami instalacji poziomej/pionowej pokazanymi w oprogramowaniu dla najlepszej dokładności.
Szczegóły

WitMotion WT61 IMU zapewnia dokładność kąta nachylenia 0,05 stopnia, cyfrowe filtrowanie, algorytm fuzji oraz zawiera funkcje przyspieszenia, żyroskopu, kąta, wibracji, MCU i filtrowania.

WitMotion WT61 IMU oferuje wyjście przyspieszenia, żyroskopu i kąta w 3 osiach. Obsługuje 3,3V-5V, niski prąd, szeregowy TTL, adaptacyjny zakres ±2/4/8/16g, wysoką dokładność, kompaktowy rozmiar, lekką wagę i szeroki zakres temperatur.

WitMotion WT61 IMU oferuje wysoką precyzję z filtrowaniem Kalmanem, certyfikaty obejmują RoHS, CE, ISO-9001.Cechy: 48MHz MCU, czujnik MEMS, stabilny chip zasilający oraz złocona miedź w interfejsie.

Algorytm WitMotion x Filtr Kalman. Algorytm WitMotion pochodzi z Algorytmu Określania Położenia Satelity w Lotnictwie, połączonego z filtrowaniem Kalman i fuzją dynamiki ruchu. Dokładność kąta: oś X, Y: 0,05° (statyczna), 0,1° (dynamiczna). Wykres przedstawia dane kątowe w czasie, z niebieskimi, czerwonymi i żółtymi liniami reprezentującymi różne pomiary lub przefiltrowane wyniki. Znaczniki czasu wahają się od 15:21:09:210 do 15:21:15:223. Oś pionowa rozciąga się od -180 do 180 stopni.

WitMotion WT61 IMU dla IoT, monitorowania środowiska, robotyki, automatyzacji, górnictwa, mostów, gadżetów VR oraz zastosowań przemysłowych.

WitMotion IMU zapewnia wysoką dokładność, stabilność, kompaktowy rozmiar, doskonałe komponenty, SDK, testy fabryczne oraz wsparcie przez cały okres użytkowania.Zawiera filtrację Kalman, algorytm fuzji oraz 12-miesięczną gwarancję, przewyższając inne.

WitMotion WT61 IMU ma 12-pinowy układ z portami VCC, GND, TX, RX, SCL, SDA, SWIM oraz zarezerwowanymi; zawiera szczegóły dotyczące rozmiaru w mm.

WitMotion WT61 IMU łączy się przez USB z adapterem OTG do wyświetlania i nagrywania danych na smartfonie. Wielofunkcyjna aplikacja na Androida wyświetla dane z czujników w czasie rzeczywistym, w tym kąty, przyspieszenie i znaczniki czasowe, z opcjami konfiguracji i rejestrowania danych.

WitMotion WT61 IMU oferuje łatwą konfigurację, funkcjonalność plug-and-play oraz pomiary postawy w czasie rzeczywistym z odczytami kątów.

WitMotion WT61 IMU oferuje kalibrację, pomiar w czasie rzeczywistym oraz eksport danych. Wyświetla i przechowuje przyspieszenie, prędkość kątową, pole magnetyczne oraz surowe dane w formacie TXT.

3D demonstracja wyświetla ruch czujnika w intuicyjny sposób. SDK wspiera Matlab, Python, Raspberry Pi, STM32, ROS, Arduino oraz C++/C#. Połączenie szeregowe TTL z MCU; TX i RX są połączone krzyżowo.

3D demonstracja wizualizuje ruch czujnika za pomocą modeli samochodu, kasku, sześcianu i drona. SDK wspiera Matlab, Python, Raspberry Pi, STM32, ROS, Arduino oraz C++/C#. Połączenie szeregowe przez TTL łączy MCU i moduł z krzyżowo połączonymi TX i RX.

Testowanie IMU obejmuje stół obrotowy 3-osiowy, wibracyjne testy, ekstremalne temperatury, starzenie oraz oceny w wysokich temperaturach.


WitMotion WT61 IMU oferuje częstotliwość zwrotu 20-100Hz, napięcie 3.3-5V oraz wykrywa przyspieszenie, kąt i żyroskop. Wspiera interfejs TTL, kompatybilny z Androidem, PC, MCU oraz Arduino.
Related Collections