WitMotion WT61C Wysokiej precyzji czujnik przyspieszenia (MPU6050) - 6-osiowy Acc+Gyro+Kąt AHRS IMU do Arduino / TTL & RS232
WitMotion WT61C Wysokiej precyzji czujnik przyspieszenia (MPU6050) - 6-osiowy Acc+Gyro+Kąt AHRS IMU do Arduino / TTL & RS232
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WitMotion WT61C to opłacalny 6-osiowy AHRS IMU, który łączy 3-osiowy akcelerometr i 3-osiowy żyroskop, aby dostarczyć przyspieszenie, prędkość kątową oraz kąt 3-osiowy (roll/pitch/yaw). Zasilany przez algorytm fuzji WitMotion (Kalman), zapewnia dokładność kąta statycznego XY na poziomie 0,05° (0,1° dynamicznie), co czyni go idealnym do wykrywania nachylenia, wibracji i orientacji w projektach wbudowanych, robotyce, automatyzacji, platformach poziomujących oraz integracjach VR/AR. Obsługuje interfejsy szeregowe TTL (3,3–5 V) oraz RS232 (5–36 V) i działa bezproblemowo z Arduino, STM32, C/C++ oraz MATLAB przy użyciu dostarczonego SDK i narzędzi PC.
Kluczowe cechy
-
Wyjścia 6-osiowe: 3-osiowe przyspieszenie, 3-osiowa prędkość kątowa oraz 3-osiowy kąt.
-
Wysoka dokładność: XY statycznie 0.05°, dynamic 0.1°; stabilność przyspieszenia 0.01 g.
-
Szerokie zakresy: Przyspieszenie ±16 g; Żyroskop ±2000 °/s; Kąt X/Z ±180°, Y 90°.
-
Regulowana szybkość wyjścia: 0.2–100 Hz; baud 9600 / 115200 bps.
-
Podwójny interfejs: TTL 3.3–5 V lub RS232 5–36 V dla łatwej integracji z MCU/przemysłowej.
-
Algorytm fuzji WitMotion: Filtracja Kalman'a z kompensacją dryfu dla stabilnej postawy.
-
Konfigurowalne za pomocą oprogramowania: Kalibracja przyspieszenia, orientacja umiejscowienia, pasmo przenoszenia, szybkość wyjścia, resetowanie osi Z do 0°.
-
Źródła dla deweloperów: Darmowe oprogramowanie na Windows PC (MiniIMU.exe), sterowniki (CH340/CP2102), instrukcja &i karta katalogowa, SDK dla 51 szeregowego, C/C++, STM32, Arduino, MATLAB, a także aplikacja na Androida i filmy demonstracyjne.
-
Narzędzia danych: Widok surowych danych, wykresy w czasie rzeczywistym, eksport TXT, oraz demo ruchu 3D (kod źródłowy dostępny na życzenie).
Specyfikacje techniczne
-
Model: WT61C
-
Marka: WitMotion
-
Napięcie wejściowe: TTL: 3.3–5 V; RS232: 5–36 V
-
Prąd: < 25 mA
-
Interfejs: TTL / RS232
-
Dane wyjściowe: 3-osiowa akceleracja, 3-osiowy żyroskop, 3-osiowy kąt (skumulowany błąd w osi Z)
-
Zakres pomiarowy: Akc ±16 g; Żyroskop ±2000 °/s; Kąt X/Z ±180°, Y 90°
-
Rozdzielczość: Akc 0.0005 g; Żyroskop 0.61 °/s
-
Stabilność: Akc 0.01 g
-
Dokładność kąta: XY statyczny 0.05°, dynamiczny 0.1°
-
Częstotliwość wyjściowa: 0.2–100 Hz
-
Prędkość Baud: 9600 / 115200 bps
-
Rozmiar: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
Instalacja: Pionowa lub pozioma
-
Waga netto: 20 g
-
Temperatura pracy: −40 ~ 85 °C
-
Definicja osi: Współrzędne kartezjańskie, zasada prawej ręki
Pinout (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Dane szeregowe wejściowe, TTL
-
RX — Dane szeregowe wyjściowe, TTL
-
GND — Masa
Protokół wyjścia kąta (nagłówek ramki 0x55 0x53)
| Indeks | Bajt | Znaczenie |
|---|---|---|
| 0 | 0x55 | Nagłówek |
| 1 | 0x53 | Identyfikacja jako kąt pakiet |
| 2 | RollL | Kąt osi X, niski bajt |
| 3 | RollH | Kąt osi X, wysoki bajt |
| 4 | PitchL | Kąt osi Y, niski bajt |
| 5 | PitchH | Oś Y kąt wysoki bajt |
| 6 | YawL | Oś Z kąt niski bajt |
| 7 | YawH | Oś Z kąt wysoki bajt |
| 8 | VL | Wersja oprogramowania niski |
| 9 | VH | Wersja oprogramowania wysoki |
| 10 | Suma | Sum kontrolny |
Dekodowanie kąta (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Sum kontrolny:Suma = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Pakiety przyspieszenia i prędkości kątowej mają podobny format.)
Oprogramowanie &i integracja
-
Narzędzia Windows pokazują surowe ramki, przetworzone dane, wykresy na żywo i wskaźniki postawy; wspierają nagrywanie &i eksport TXT.
-
Demo 3D wizualizuje ruch; kod źródłowy może być dostarczony.
-
Połączenie MCU: bezpośredni port szeregowy do Arduino/MCU; TTL jest zalecany dla prostszej integracji.
Typowe zastosowania
-
Automatyzacja &i robotyka, monitorowanie kąta nachylenia, platformy poziomujące, monitorowanie wibracji, testowanie przemysłowe, integracja IoT, gogle VR/AR.
Szczegóły

Ekonomiczny IMU z dokładnością 0,05° w osiach X Y.Cechy inclinations, wibracji i pomiaru postawy z wykorzystaniem algorytmu fuzji WitMotion. Zawiera przyspieszenie, żyroskop, kąt, wibracje, filtrację Kalman oraz funkcje MCU.
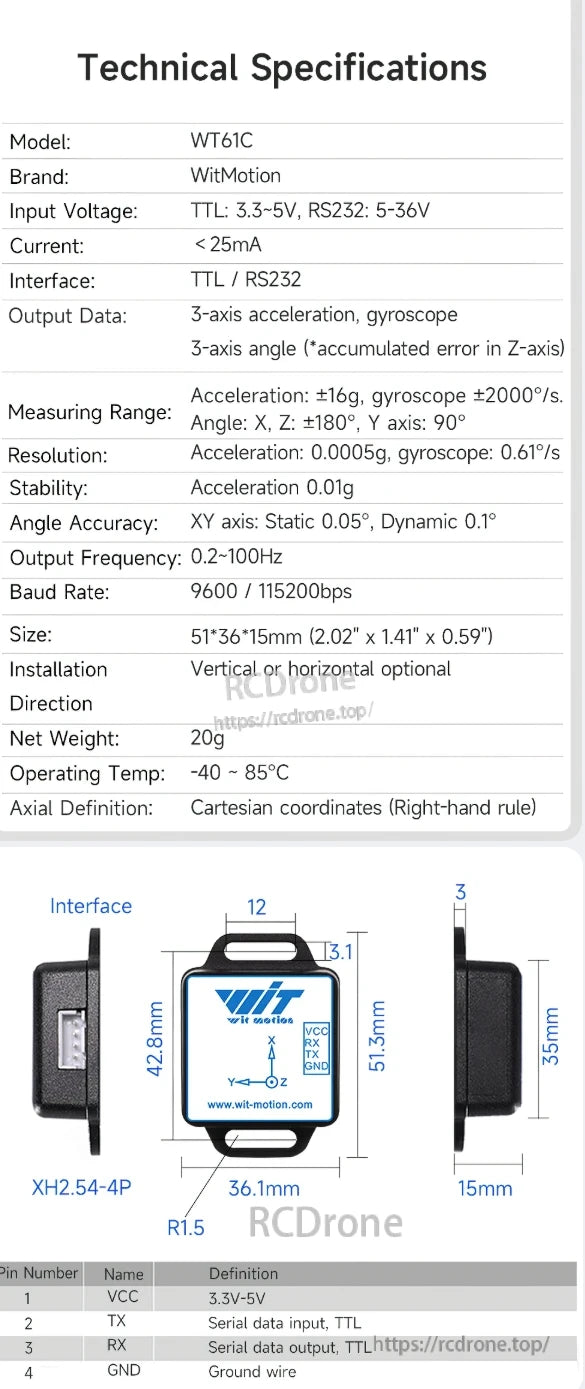
Czujnik WitMotion WT61C oferuje przyspieszenie 3-osiowe oraz żyroskop z zakresem ±16g/±2000°/s, rozdzielczością 0.0005g, interfejsem TTL/RS232, prędkością transmisji 9600/115200bps, zakresem temperatury pracy od -40°C do 85°C oraz wymiarami 51.3×36.1×15mm.
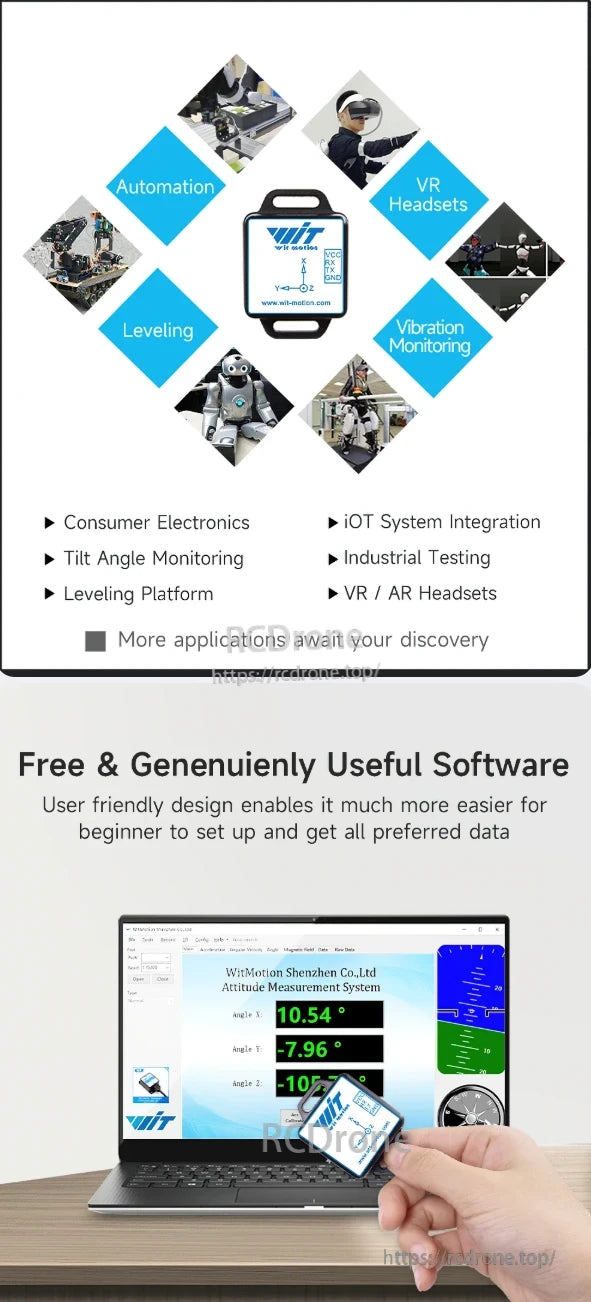
Czujnik akcelerometru WitMotion WT61C umożliwia automatyzację, zestawy VR, poziomowanie oraz monitorowanie wibracji. Oferuje darmowe oprogramowanie do łatwej konfiguracji, wyświetlające dane o postawie w czasie rzeczywistym z przyjaznym interfejsem dla elektroniki użytkowej, IoT, testów przemysłowych i wielu innych zastosowań.
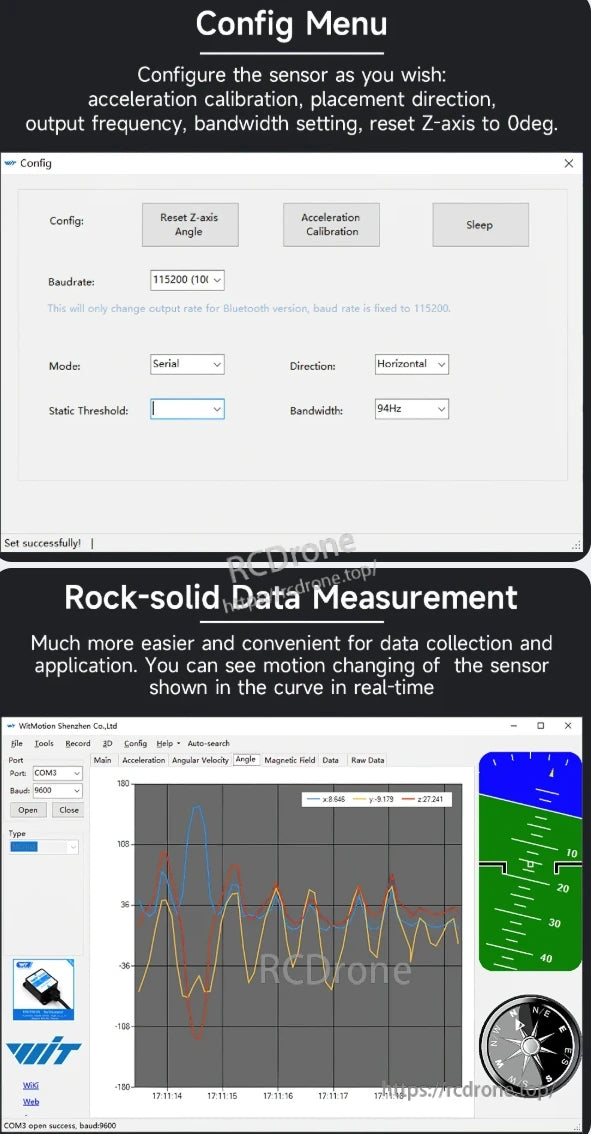
Konfigurowalny czujnik z kalibracją przyspieszenia, ustawieniem kierunku i pomiarem danych w czasie rzeczywistym.Cechy obejmują reset osi Z, regulację pasma i wyświetlanie krzywej ruchu na żywo dla precyzyjnego monitorowania i analizy.
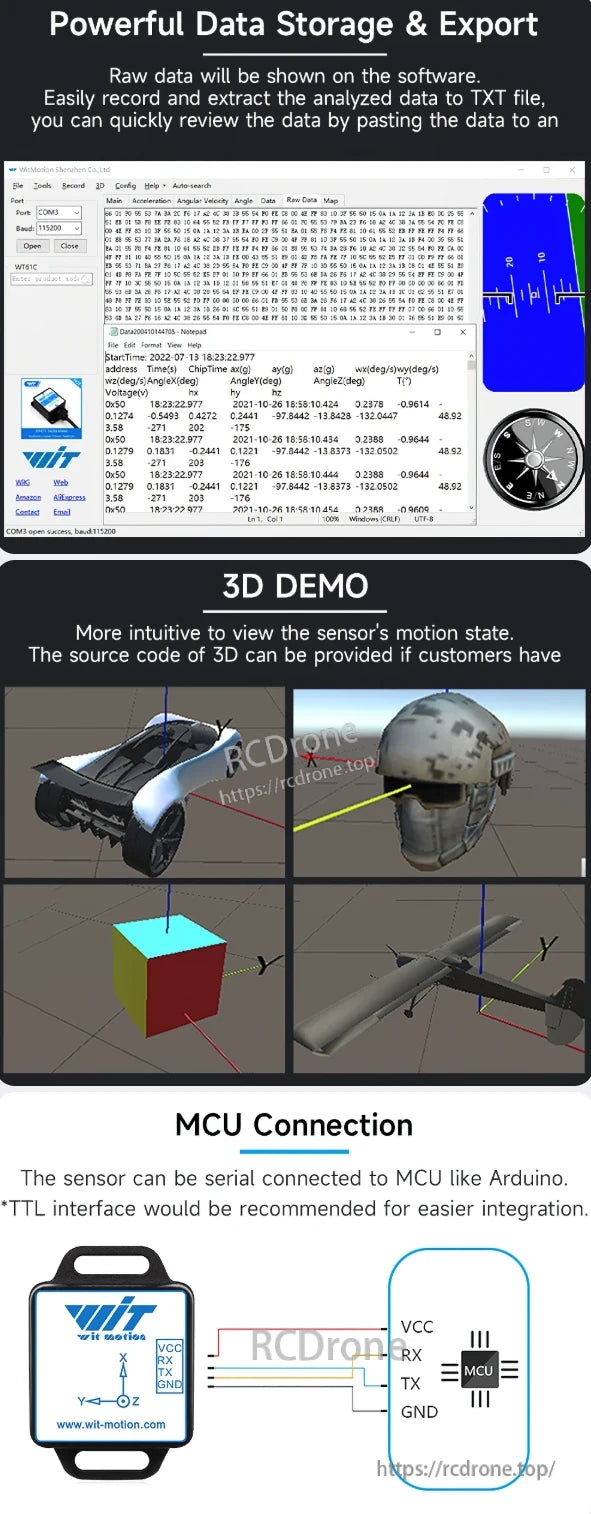
WitMotion WT61C oferuje wysoką dokładność wykrywania ruchu z eksportem danych do plików TXT, wizualizację 3D dla intuicyjnej analizy ruchu oraz łatwą integrację MCU za pomocą interfejsu TTL.

Zestawy rozwojowe dla WitMotion WT61C zawierają oprogramowanie, sterowniki i dokumentację dla STM32, Arduino, Windows i Matlab. Oferują SDK, podręczniki, karty katalogowe, filmy demonstracyjne oraz wsparcie dla aplikacji na Androida.
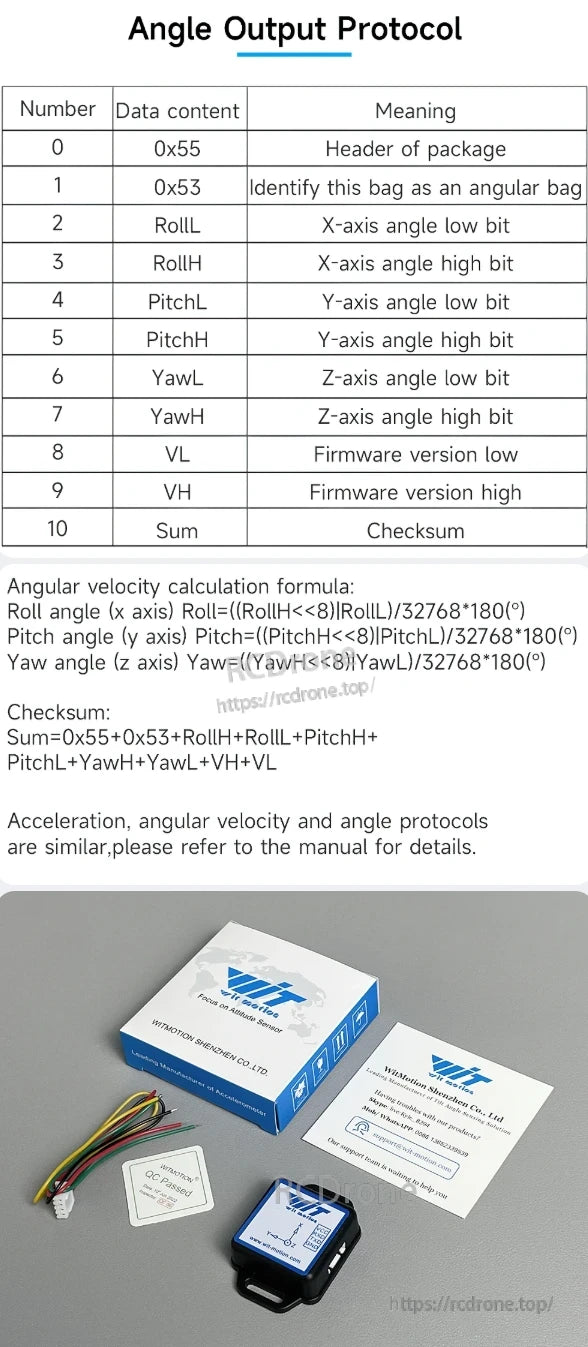
WitMotion czujnik WT61C oferuje protokół wyjścia kątowego z danymi o roll, pitch, yaw, wersji oprogramowania i sumie kontrolnej. Zawiera wzory obliczeniowe, dokumentację, kable i etykietę QC.
Related Collections