












WitMotion WT901C-485 9-osiowy IMU Akcelerometr, Żyroskop, Cyfrowy Kompas (RS485/RS232/TTL), dokładność kąta 0,05°, AHRS 0,2–200 Hz
WitMotion WT901C-485 9-osiowy IMU Akcelerometr, Żyroskop, Cyfrowy Kompas (RS485/RS232/TTL), dokładność kąta 0,05°, AHRS 0,2–200 Hz
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
WitMotion WT901C-485 to kompaktowy 9-osiowy AHRS IMU, oparty na trójosiowym czujniku klasy MPU9250 (akcelerometr + żyroskop + magnetometr) oraz algorytmie fuzji/Kalmana WitMotion. Dostarcza kąty, przyspieszenie, prędkość kątową, pole magnetyczne oraz wyjścia kwaternionowe z dokładnością statyczną XY 0,05° (dynamiczną 0,1°) oraz regulowaną częstotliwością aktualizacji 0,2–200 Hz. Liczne interfejsy fizyczne (RS485/RS232 Modbus &i TTL UART) oraz szerokie zakresy wejściowe sprawiają, że WT901C-485 jest łatwy do integracji z Arduino/STM32/MCUs, komputerami PC oraz kontrolerami przemysłowymi. Oficjalne oprogramowanie na system Windows (MiniIMU.exe) oferuje wykresy w czasie rzeczywistym, demonstrację 3D, rejestrowanie/eksport danych oraz wizualną kalibrację magnetyczną.
Kluczowe cechy
-
Wyjścia 9-osiowe: kąt (Roll/Pitch/Yaw), 3-osiowe acc/gyro/mag, kwaternion.
-
Wysoka stabilność &i dokładność: XY 0,05° statyczne, 0,1° dynamiczne; stabilność przyspieszenia 0,01 g.
-
Elastyczne I/O: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (domyślnie 9,600).
-
Regulowana częstotliwość: 0,2–200 Hz (domyślnie 10 Hz).
-
Szeroki zakres zasilania: TTL 3,3–5 V, RS232/RS485 5–36 V; <25 mA typowe.
-
Narzędzia &i SDK: aplikacja na Windows, aplikacja na Android, sterowniki CH340/CP2102, przykładowy kod dla C/C++/STM32/Arduino/Matlab.
-
Kalibracja magnetyczna &i demo 3D do pierwszej konfiguracji; wykresy na żywo i eksport TXT.
-
Projekt przemysłowy: –40~85 °C, 51×36×15 mm, montaż pionowy lub poziomy.
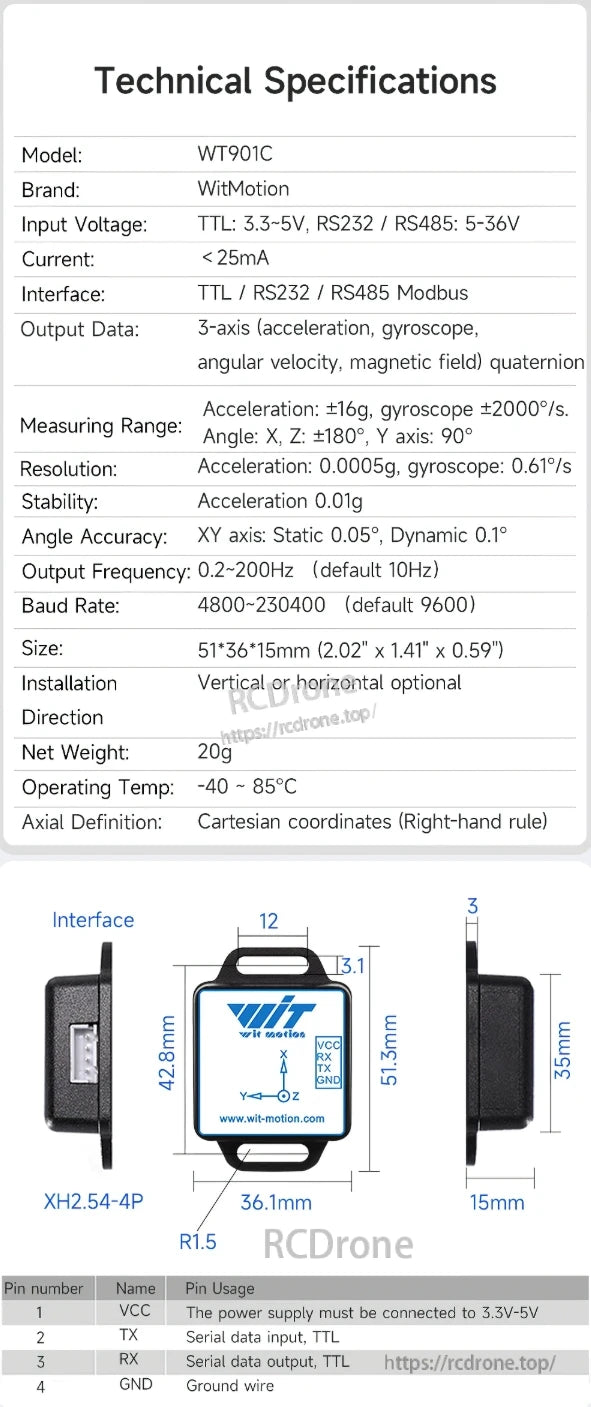
Specyfikacje techniczne
| Przedmiot | Spec |
|---|---|
| Model | WT901C (wariant WT901C-485) |
| Interfejsy | TTL / RS232 / RS485 (Modbus) |
| Napięcie wejściowe | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Prąd | < 25 mA |
| Dane wyjściowe | Przyspieszenie, prędkość kątowa, pole magnetyczne, kąt, kwaternion |
| Zakresy pomiarowe | Acc ±16 g, Gyro ±2000 °/s; Kąt: X,Z ±180°, Y 90° |
| Rozdzielczość | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabilność | Przyspieszenie 0.01 g |
| Dokładność kąta | XY statyczny 0.05°, dynamika 0.1° |
| Częstotliwość wyjściowa | 0.2–200 Hz (domyślnie 10 Hz) |
| Prędkość baud | 4,800–230,400 (domyślnie 9,600) |
| Rozmiar / waga | 51×36×15 mm, 20 g |
| Temperatura pracy | –40 ~ 85 °C |
| Osie | Kartezjańskie, zasada prawej ręki |
| Instalacja | W pionie lub poziomie |
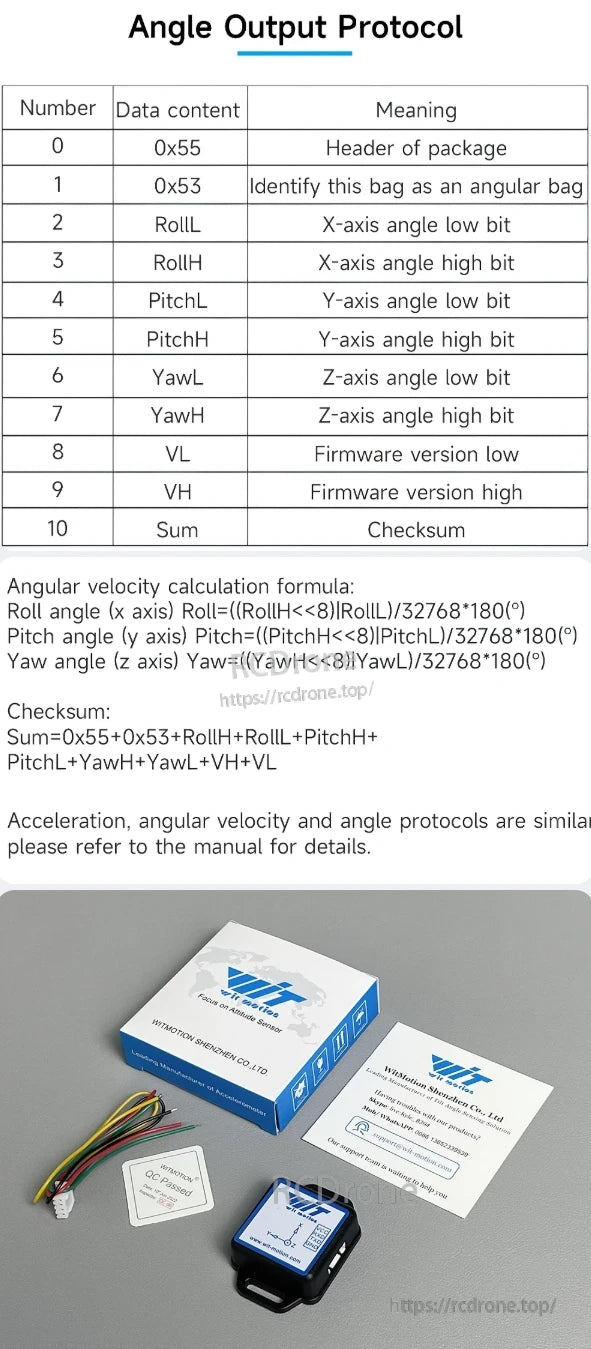
Ramka kąta (0x55 0x53) – protokół wyjściowy
| Indeks bajtu | Zawartość | Znaczenie |
|---|---|---|
| 0 | 0x55 | Nagłówek pakietu |
| 1 | 0x53 | ID ramki „Kąt” |
| 2–3 | RollL/RollH | Kąt osi X (niski/wysoki) |
| 4–5 | Kąt nachylenia L/N | Kąt osi Y (niski/wysoki) |
| 6–7 | Kąt obrotu L/H | Kąt osi Z (niski/wysoki) |
| 8 | VL | Wersja oprogramowania niska |
| 9 | VH | Wersja oprogramowania wysoka |
| 10 | Suma | Suma kontrolna |
Dekodowanie kątów
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Sum kontrolny
Sum = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Przyspieszenie i ramki prędkości kątowej mają ten sam styl układu—zobacz podręcznik.)
Wymiary &i złącze
Rozmiar obudowy: 51 × 36 × 15 mm (W × S × G), z uchwytami montażowymi; waga ≈ 20 g.
Złącze: XH2.54-4P (złącze na płytce czujnika).
Rozkład pinów (wersja TTL)
| Pin | Nazwa | Opis |
|---|---|---|
| 1 | VCC | Wejście zasilania 3.3–5 V |
| 2 | TX | Wejście danych szeregowych, poziom TTL |
| 3 | RX | Wyjście danych szeregowych, poziom TTL |
| 4 | GND | Uziemienie |
Uwagi: Używaj poziomów TTL do bezpośredniej integracji z MCU. Warianty RS232/RS485 używają swoich odpowiednich poziomów napięcia i standardów okablowania.
Oprogramowanie &i narzędzia
-
MiniIMU.exe (Windows): konfiguracja (algorytm, kierunek instalacji, zakresy, pasmo), wykresy w czasie rzeczywistym, widok surowy/hex, nagrywanie danych i eksport TXT.
-
Demo 3D: wizualizacja orientacji w czasie rzeczywistym (źródło dostępne).
-
Wizualna kalibracja magnetyczna: kreator dopasowania elipsy do usunięcia przesunięcia (zalecane przy pierwszym użyciu).
-
Sterowniki &i kod: sterowniki CH340/CP2102; przykłady dla STM32, Arduino, C/C++, Matlab; aplikacja na Androida; filmy demonstracyjne na PC/telefonie.
Typowe zastosowania
Automatyzacja i robotyka, poziomowanie platform, monitorowanie kąta nachylenia, monitorowanie wibracji, elektronika użytkowa, integracja systemów IoT, testy przemysłowe, gogle VR/AR.
Szczegóły

Ekonomiczny AHRS IMU z dokładnością 0,05° w osiach X Y. Oferuje pomiar nachylenia, wibracji, orientacji przy użyciu algorytmu fuzji WitMotion. Zawiera funkcje przyspieszenia, żyroskopu, kąta, magnetyczne, filtr Kalman i funkcje kwaternionowe.
Czujnik IMU WitMotion WT901C oferuje pomiar przyspieszenia w 3 osiach, żyroskop, prędkość kątową oraz pomiar pola magnetycznego. Obsługuje interfejsy TTL/RS232/RS485, ma zakres przyspieszenia ±16g, żyroskop ±2000°/s, dokładność kąta statycznego 0,05° i działa w temperaturze od -40°C do 85°C.

Czujnik IMU WitMotion WT901C oferuje automatyzację, zestawy VR, poziomowanie oraz monitorowanie wibracji. Zastosowania obejmują elektronikę użytkową, integrację IoT, testy przemysłowe oraz AR/VR. Darmowe oprogramowanie zapewnia przyjazny dla użytkownika pomiar postawy z danymi kątowymi w czasie rzeczywistym.
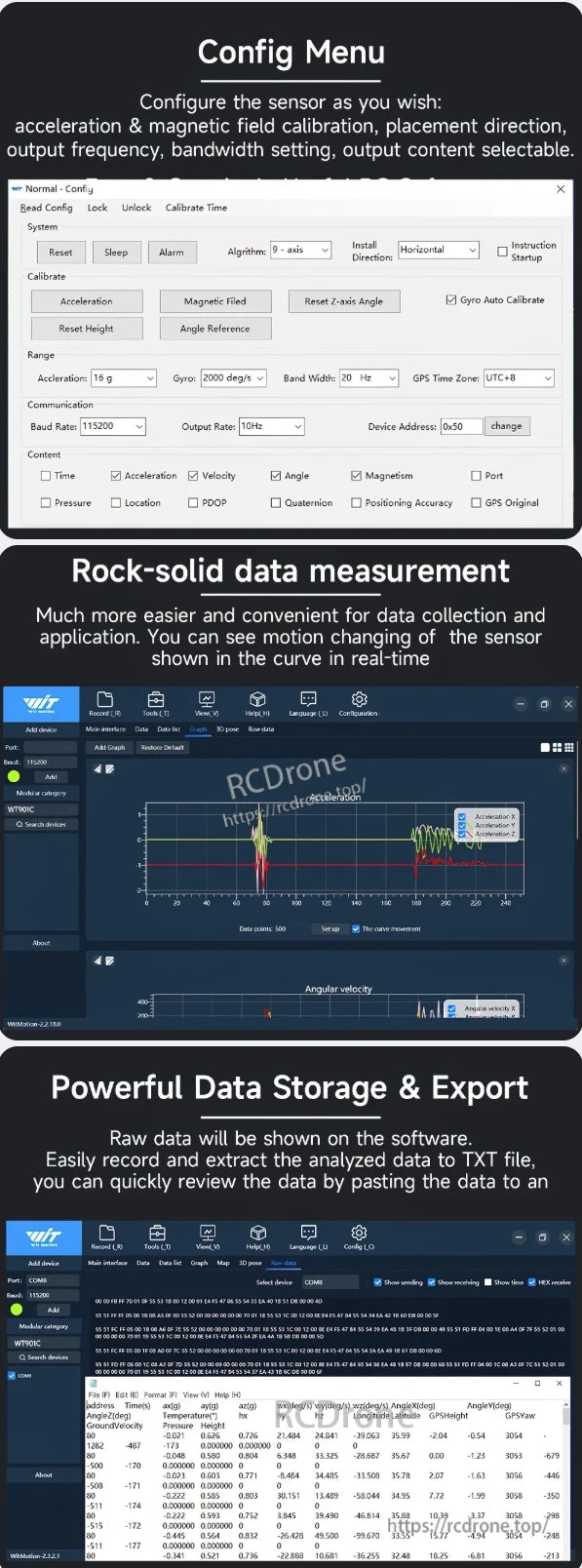
Czujnik IMU WitMotion WT901C oferuje konfigurowalne ustawienia dla przyspieszenia, pola magnetycznego i orientacji. Zapewnia wizualizację danych w czasie rzeczywistym, solidne pomiary oraz obsługuje przechowywanie/eksport danych w formacie TXT do analizy.
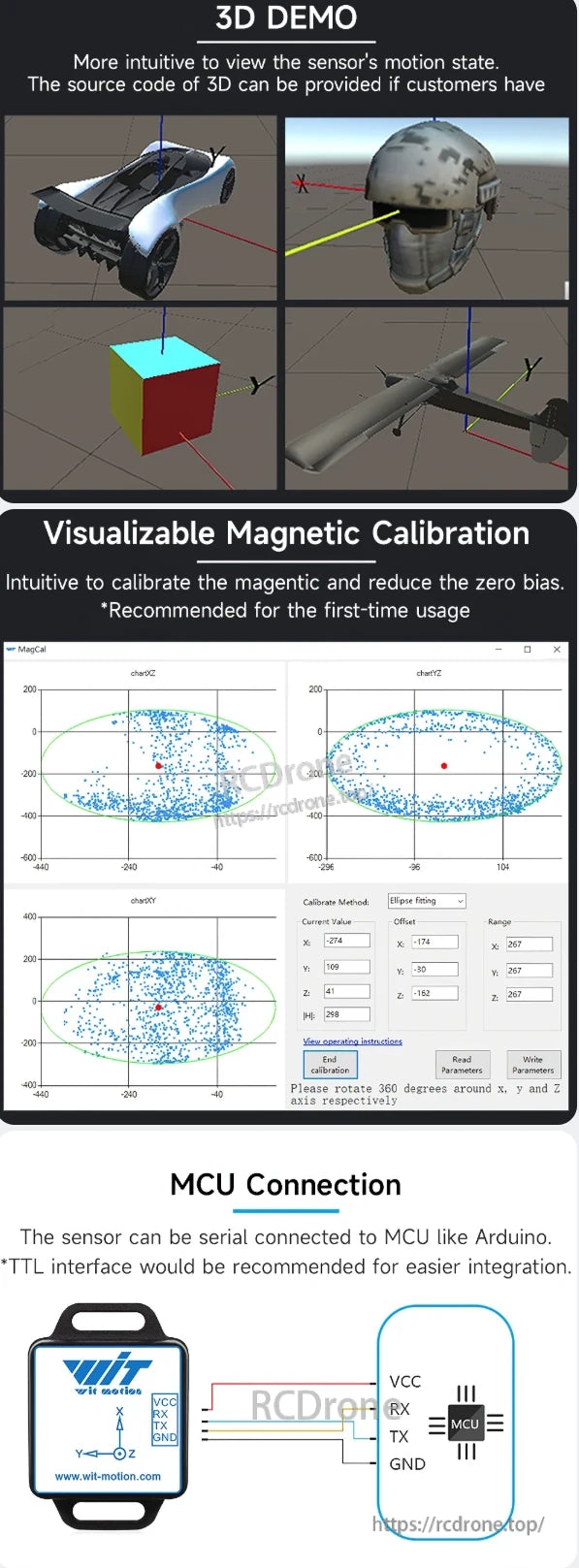
Demonstracja 3D wizualizuje ruch czujnika za pomocą modeli samochodu, kasku, sześcianu i drona. Interfejs kalibracji magnetycznej umożliwia intuicyjne dostosowanie. Szczegóły połączenia MCU zawierają interfejs TTL dla Arduino, z oznaczonymi pinami VCC, RX, TX, GND.

Zestawy rozwojowe zawierają darmowe oprogramowanie Windows, sterowniki, podręczniki i przykładowe kody dla STM32, Arduino, C++, MATLAB. Zawiera pliki PDF, filmy demonstracyjne oraz wsparcie aplikacji na Androida dla czujnika IMU WT901C.
Szczegóły protokołu wyjścia kątowego czujnika IMU WT901C: struktura danych, obliczenia kątowe, wzór na sumę kontrolną, pakowanie. Zawiera kąty roll, pitch, yaw, wersję oprogramowania oraz sumę kontrolną.
Related Collections












