









WitMotion WT901C 9-osiowy AHRS IMU — Akcelerometr, żyroskop, magnetometr z kątem & kwaternionowym, dokładność 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-osiowy AHRS IMU — Akcelerometr, żyroskop, magnetometr z kątem & kwaternionowym, dokładność 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WitMotion WT901C to kompaktowy 9-osiowy AHRS IMU, który łączy 3-osiowy akcelerometr, 3-osiowy żyroskop i 3-osiowy magnetometr z filtracją fuzji/Kalmana WitMotion, aby wyjściowo podać kąty (roll/pitch/yaw), prędkość kątową, przyspieszenie, pole magnetyczne i kwaternion. Oferuje 0.05° statycznej dokładności XY (0.1° dynamicznej), wspiera 0.2–200 Hz częstotliwości aktualizacji i komunikuje się przez TTL, RS232 lub RS485 (Modbus)—idealny do pomiaru nachylenia, wibracji i orientacji w automatyzacji, platformach poziomujących, VR/AR oraz testach przemysłowych.
Kluczowe cechy
-
Wysoka dokładność AHRS: statyczne XY 0.05°, dynamiczne 0.1°; osie kartezjańskie prawej ręki.
-
Szeroki I/O &i napięcie: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (domyślnie 9 600).
-
Konfigurowalne wyjście: 0.2–200 Hz (domyślnie 10 Hz); zawartość do wyboru przez użytkownika.
-
Pełne dane 9-osiowe: Przyspieszenie, prędkość kątowa, pole magnetyczne, kąt &i quaternion.
-
Narzędzia wizualizacyjne: Oprogramowanie Windows MiniIMU z wykresami w czasie rzeczywistym, rejestrowaniem/eksportem surowych danych (TXT), demo ruchu 3D, oraz wizualna kalibracja magnetyczna.
-
Zasoby dla deweloperów: Sterowniki (CH340/CP2102), podręczniki/karta danych, przykładowy kod dla 51/C++/STM32/Arduino/Matlab, oraz aplikacja na Androida.
-
Elastyczny montaż: Montaż pionowy lub poziomy; kompaktowy 51 × 36 × 15 mm, ~20 g.
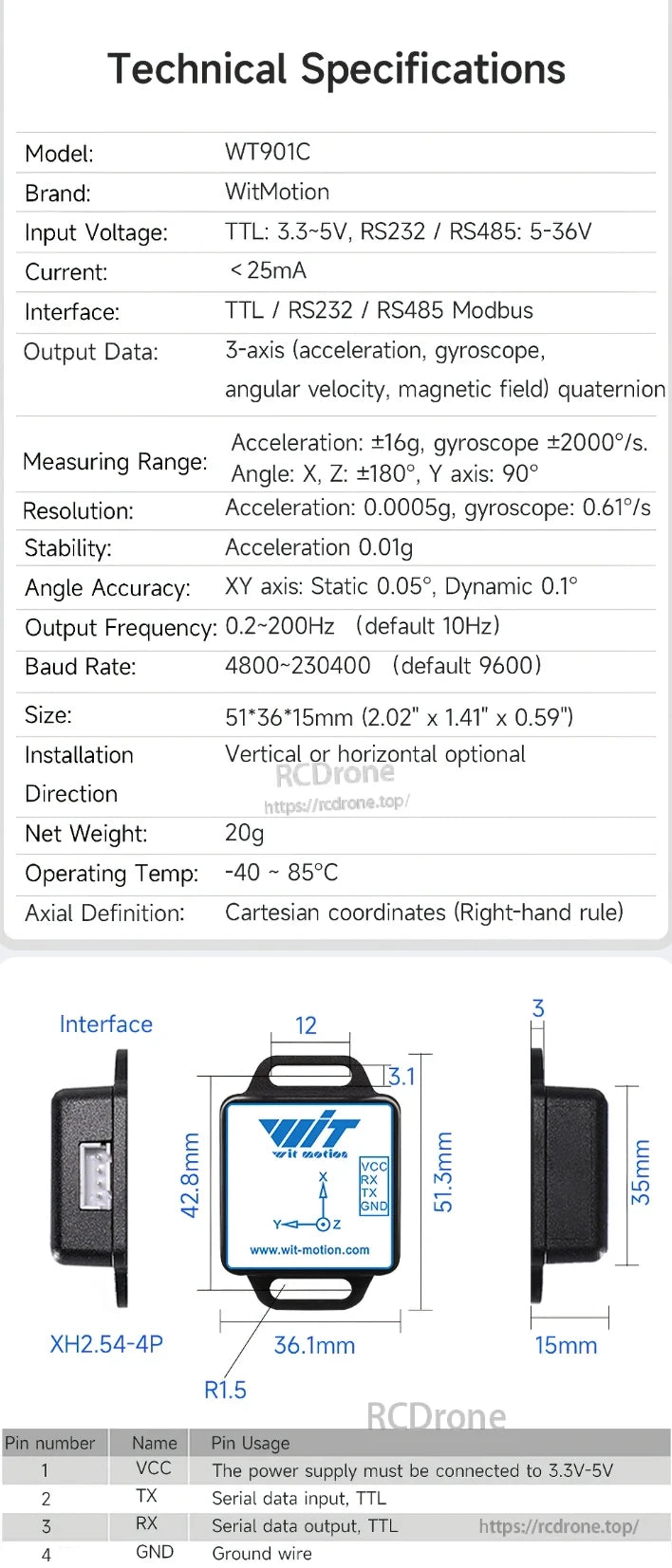
Specyfikacje techniczne
-
Model/Marka: WT901C / WitMotion
-
Interfejsy: TTL / RS232 / RS485 (Modbus)
-
Napięcie wejściowe: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Prąd: < 25 mA
-
Dane wyjściowe: 3-osiowe przyspieszenie, żyroskop (prędkość kątowa), pole magnetyczne, kąt, kwaternion
-
Zakres pomiarowy: Acc ±16 g; Gyro ±2000 °/s; Kąt X,Z ±180°, Y 90°
-
Rozdzielczość: Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilność: Acc 0.01 g
-
Dokładność kąta: XY statyczna 0.05°, dynamika 0.1°
-
Częstotliwość wyjściowa: 0.2–200 Hz (domyślnie 10 Hz)
-
Prędkość baud: 4 800–230 400 (domyślnie 9 600)
-
Rozmiar / Waga: 51 × 36 × 15 mm / ≈ 20 g
-
Temperatura pracy: −40 ~ 85 °C
-
Definicja osi: współrzędne kartezjańskie, prawej ręki
Wymiary &i złącze (wersja TTL)
-
Obudowa: 51.3 mm (H) × 36.1 mm (W) × 15 mm (D); promień uchwytów montażowych R1.5
-
Złącze: XH2.54-4P
-
Pinout (lewo→prawo na etykiecie VCC/RX/TX/GND):
-
VCC — zasilanie 3.3–5 V
-
TX — Wejście danych szeregowych, TTL
-
RX — Wyjście danych szeregowych, TTL
-
GND — masa
-
Uwaga: Grafika osi jest wydrukowana na obudowie (X↑, Y→, Z•), co ułatwia wyrównanie.
Protokół wyjścia kąta (ramka 0x55 0x53)
| Byte | Zawartość | Znaczenie |
|---|---|---|
| 0 | 0x55 | Nagłówek |
| 1 | 0x53 | ID ramki kąta |
| 2–3 | RollL/RollH | Kąt osi X |
| 4–5 | PitchL/PitchH | Kąt osi Y |
| 6–7 | YawL/YawH | Kąt osi Z |
| 8–9 | VL/VH | Wersja oprogramowania (niska/wysoka) |
| 10 | Suma | Checksum |
Konwersja kątów:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Ramki przyspieszenia i prędkości kątowej są podobne; zobacz podręcznik.)
Oprogramowanie &i narzędzia
-
Windows (MiniIMU.exe): konfiguracja urządzenia (zakresy, pasmo, wskaźnik wyjścia), wykresy w czasie rzeczywistym, widok surowych danych, wizualizacja pozycji 3D, eksport do TXT.
-
Kalibracja MC: wizualny proces dopasowania elipsy w celu redukcji błędu (obrót wokół X/Y/Z).
-
Integracja MCU: bezpośrednie połączenie szeregowe; TTL zalecane do prostego podłączenia MCU (Arduino/STM32 itp.).
-
Włączone zasoby: Datasheet.pdf, sterowniki CH340 &i CP2102, przykładowy kod, Aplikacja na Androida, filmy demonstracyjne.
Typowe zastosowania
Automatyzacja | Monitorowanie przechyłu/poziomu | Monitorowanie wibracji | Poziomowanie platform | Integracja systemów IoT | Testy przemysłowe | gogle VR/AR | Elektronika użytkowa.
Szczegóły

Ekonomiczny AHRS IMU z dokładnością 0,05° w osiach X i Y. Oferuje pomiar nachylenia, wibracji i orientacji za pomocą algorytmu fuzji WitMotion. Zawiera przyspieszenie, żyroskop, kąt, magnetometr, filtrację Kalman oraz funkcje kwaternionowe.
WitMotion WT901C IMU oferuje pomiar w 3 osiach z przyspieszeniem, żyroskopem i magnetometrem. Zapewnia wyjście kwaternionowe. Obsługuje TTL, RS232, RS485. Mierzy ±16g, ±2000°/s, ±180° kąty. Kompaktowy rozmiar 51×36×15mm. Działa w temperaturze od -40 do 85°C.

WitMotion WT901C IMU wspiera automatyzację, zestawy VR, poziomowanie i monitorowanie wibracji. Działa w elektronice użytkowej, IoT, testach przemysłowych oraz AR/VR. Dostarczany jest z darmowym oprogramowaniem do wyświetlania danych kątowych w czasie rzeczywistym.

Menu konfiguracyjne WitMotion WT901C IMU umożliwia kalibrację czujnika, ustawienia wyjścia danych oraz wizualizację ruchu w czasie rzeczywistym. Obsługuje algorytm 9-osiowy, regulowaną akcelerację, żyroskop, pasmo przenoszenia oraz strefę czasową GPS. Wykresy w czasie rzeczywistym pokazują przyspieszenie i prędkość kątową dla precyzyjnych pomiarów.
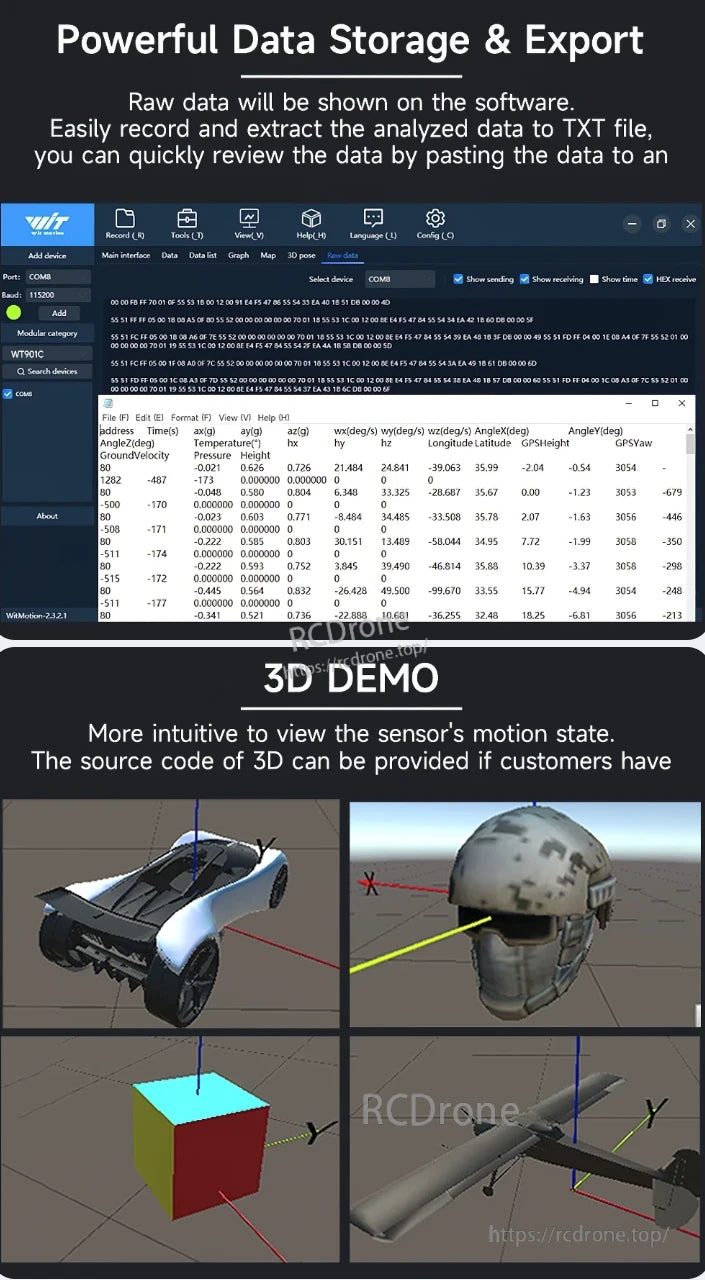
WitMotion WT901C IMU oferuje potężne przechowywanie danych, łatwy eksport TXT oraz wizualizację ruchu 3D z dostępnym kodem źródłowym.
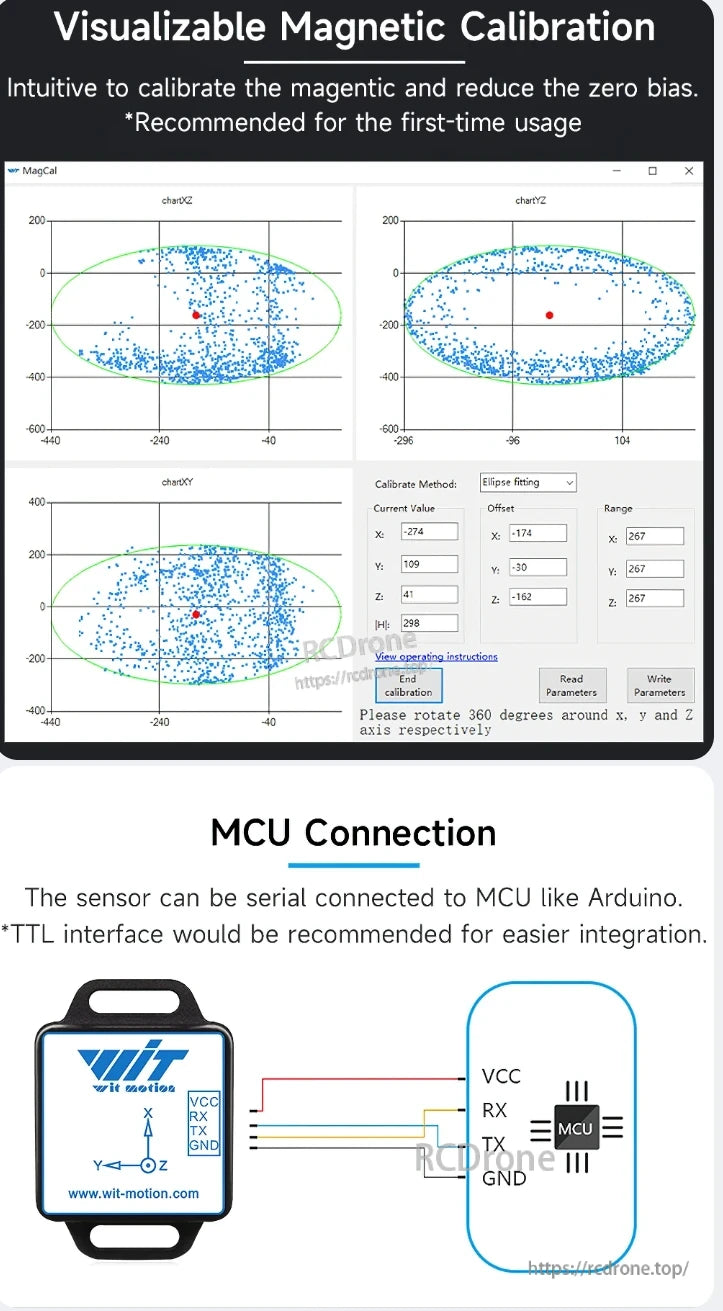
Wizualizowalna kalibracja magnetyczna dla WT901C IMU z metodą dopasowania elipsy. Połączenie MCU za pomocą interfejsu TTL jest zalecane. Czujnik łączy się z MCU podobnymi do Arduino za pomocą pinów VCC, RX, TX, GND.
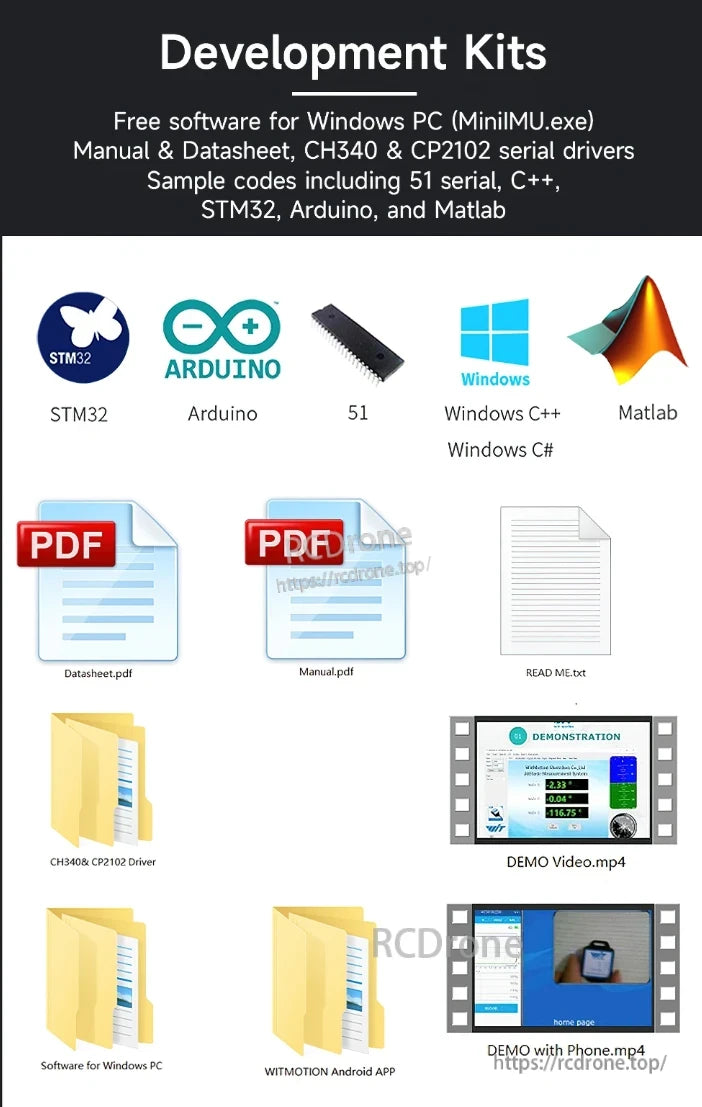
Zestawy rozwojowe zawierają darmowe oprogramowanie dla systemu Windows, podręcznik, kartę danych, sterowniki CH340 & CP2102, przykładowe kody dla 51, C++, STM32, Arduino i Matlab, a także filmy demonstracyjne i aplikację na Androida.
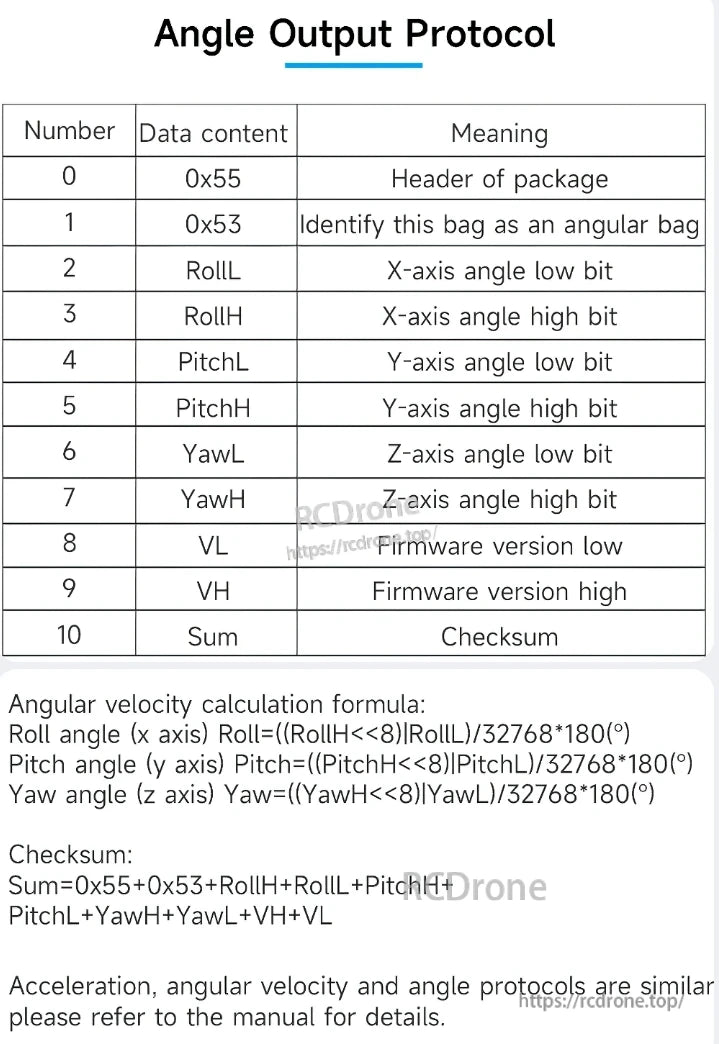
Struktura danych dla wyjścia kąta IMU WT901C zawiera nagłówek, kąt roll, kąt pitch, kąt yaw, wersję oprogramowania oraz sumę kontrolną. Podano wzory do obliczeń i weryfikacji. Podobne struktury istnieją dla przyspieszenia i prędkości kątowej.
Related Collections









