





WitMotion WTGAHRS3 6-osiowy GPS-IMU AHRS/INS Akcelerometr, Żyroskop, Czujnik kąta, RS485/TTL, Beidou+GPS, IP67, Filtr Kalmana
WitMotion WTGAHRS3 6-osiowy GPS-IMU AHRS/INS Akcelerometr, Żyroskop, Czujnik kąta, RS485/TTL, Beidou+GPS, IP67, Filtr Kalmana
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WTGAHRS3 to profesjonalny czujnik nawigacji inercyjnej, który łączy 6-osiowe IMU z precyzyjnym pozycjonowaniem satelitarnym. Integruje akcelerometr, żyroskop i rozwiązanie do określania postawy z filtracją Kalman'a dla stabilnego, wysokoprecyzyjnego wyjścia kątowego, a (w wersjach GPS) raportuje szerokość/długość geograficzną oraz prędkość na ziemi. Obudowa jest aluminiowa z ochroną IP67 przed kurzem/wodą, zewnętrznym interfejsem antenowym oraz ekranowanym kablem dla zachowania integralności sygnału. Oprogramowanie na PC oraz przykładowy kod (Windows C/C#, STM32, 51, MATLAB) są dostarczane dla szybkiej integracji.
Wydajność podstawowa
-
Dokładność postawy: statyczna 0.05°, dynamiczna 0.1° (specyfikacja serii)
-
Zakres IMU: przyspieszenie ±16 g; żyroskop ±500 °/s; zakres kąta ±180°
-
Wyjścia: czas, przyspieszenie, prędkość kątowa, kąt Eulera; wersje GPS dodają szerokość geograficzną, długość geograficzną, prędkość na ziemi
-
Filtry/algorytmy: filtracja cyfrowa, filtr Kalman, estymacja kinetyczna/stanu
-
Nawigacja: wbudowane GPS + BeiDou (BDS) z opcjonalnym odbiorem wielokosmicznym i wysoką precyzją nawigacji inercyjnej wewnątrz budynków (fuzja IMU)
-
Obudowa: aluminium, IP67; port anteny zewnętrznej; osłonięty przewód osłonowy
Linia modeli &i interfejsy danych
-
WTGAHRS3-TTL/232 — Poziom szeregowy TTL/RS-232, IMU o wysokiej częstotliwości + fuzja kierunku; dokładny kierunek nawet bez GPS.
-
WTGAHRS3-485 — interfejs przemysłowy RS485, protokół MODBUS; integruje dane IMU dla czystego pozycjonowania inercjalnego.
-
WTGAHRS3-GPS — dodaje wielokonsolacyjne GNSS (BDS/GPS/GLONASS/Galileo/QZSS/SBAS) dla wyjścia szerokości/długości geograficznej oraz prędkości względem ziemi.
Specyfikacje
Ogólne specyfikacje IMU (dotyczy wszystkich modeli)
| Element | Spec |
|---|---|
| Zmierzona oś | 3-osiowy Akcelerometr, 3-osiowy Żyroskop, Kąt |
| Zakres pomiaru | Akcelerometr ±16 g; Żyroskop ±500 °/s; Kąt ±180° |
| Dokładność kąta | XY: 0.2°, Z: 0.5° |
| Treść wyjściowa | Czas, przyspieszenie, żyroskop, kąt Eulera (modele GPS również wyświetlają szerokość/długość geograficzną oraz prędkość względem podłoża) |
| Waga | 83.76 g |
| Długość kabla | 1 m |
Parametry WTGAHRS3-TTL/232
| Przedmiot | Spec |
|---|---|
| Interfejs | Port szeregowy (poziom TTL/232) |
| Prędkość baud | 4,800 ~ 921,600 bps |
Parametry WTGAHRS3-485
| Przedmiot | Spec |
|---|---|
| Napięcie zasilania | 5–36 V |
| Prąd | < 50 mA |
| Prędkość baud | 115,200 bps (konfigurowalna 4,800 ~ 460,800) |
| Częstotliwość aktualizacji | 1 Hz |
| Temperatura pracy | −30 ~ +85 °C |
| Interfejs danych | RS485 |
| Protokół | MODBUS |
Parametry WTGAHRS3-GPS (GNSS)
| Pozycja | Specyfikacja |
|---|---|
| Konstelacje | BDS/GPS/GLONASS/GALILEO/QZSS/SBAS |
| Kanały RF | 3-kanałowe RF, wspiera odbiór pełnej konstelacji |
| TTFF (zimny/gorący/ponowne przechwycenie) | ≤32 s / ≤1 s / ≤1 s |
| Wrażliwość | Zimny −148 dBm; Gorący −156 dBm; Ponowne przechwycenie −160 dBm; Śledzenie −162 dBm |
| Dokładność pozycji | < 2.5 m (CEP50) |
| Dokładność prędkości | < 0.1 m/s (1σ) |
| Aktualizacja pozycji | 1/2/5/10 Hz (domyślnie 1 Hz) |
| Protokół | NMEA 0183 |
| Max wysokość / prędkość | 18,000 m / 515 m/s |
| Typowe zużycie energii GNSS | < 29 mA @ 3.3 V |
| Temperatura pracy / przechowywania | −40 ~ +85 °C / −45 ~ +125 °C |
Mechaniczne &i złącze
| Przedmiot | Spec |
|---|---|
| Wymiary | ~40 mm × 34 mm obudowa |
| Montaż | Średnica otworu 3 mm, rozstaw otworów 32 mm |
| Szerokość panelu czołowego | 26 mm (referencja) |
| Oznaczone piny | VCC / RXD / TXD / GND |
| Antena | Zewnętrzny port antenowy (modele GNSS) |
| Obudowa | Aluminium, IP67, odporny na kurz/wodę/wstrząsy |
| Kabel | Opleciony przewód (anty-zakłóceniowy) |
Oprogramowanie &i rozwój
-
Oprogramowanie dla Windows PC: pulpit nawigacyjny, rejestracja danych, wyświetlanie krzywej, wyświetlanie modelu 3D, konfiguracja.
-
Źródła: Podręcznik użytkownika, Sterownik portu szeregowego, Oprogramowanie na PC, programy przykładowe dla STM32, 51, Windows C/C#, MATLAB.
Typowe zastosowania
-
Roboty mobilne, AGV/AMR, pojazdy przemysłowe, platformy morskie
-
UAV, gimbale, wskazywanie anten, wózki mapujące
-
Podziemna/wnętrzowa inercjalna nawigacja (RS485/TTL) oraz zewnętrzna nawigacja wspomagana GNSS (model GPS)
Szczegóły
Sześciokierunkowy czujnik nawigacji inercjalnej z GPS i Beidou, z funkcjami pomiaru przyspieszenia, żyroskopu, kąta, długości geograficznej, wymiaru i prędkości względem ziemi.

Wysoka precyzja i stabilność dzięki filtrowaniu Kalman, filtrowaniu cyfrowemu i estymacji stanu. Obsługuje system China Beidou oraz U.S. GPS dla dokładnego pozycjonowania, pomiaru długości i szerokości geograficznej oraz prędkości na ziemi.
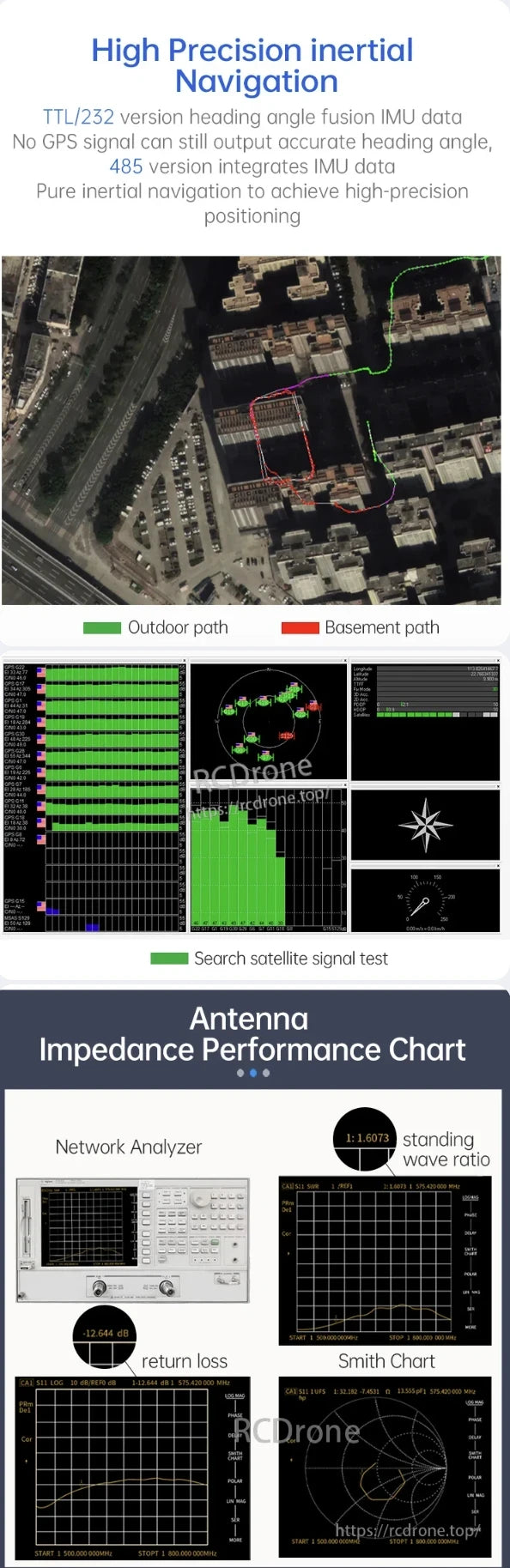
Wysoka precyzja nawigacji inercjalnej z fuzją danych IMU, umożliwiająca dokładne określenie kierunku bez GPS. Oferuje wydajność impedancji anteny, wyniki analizatora sieci, stratę odbicia, współczynnik fali stojącej oraz wykres Smitha dla integralności sygnału.
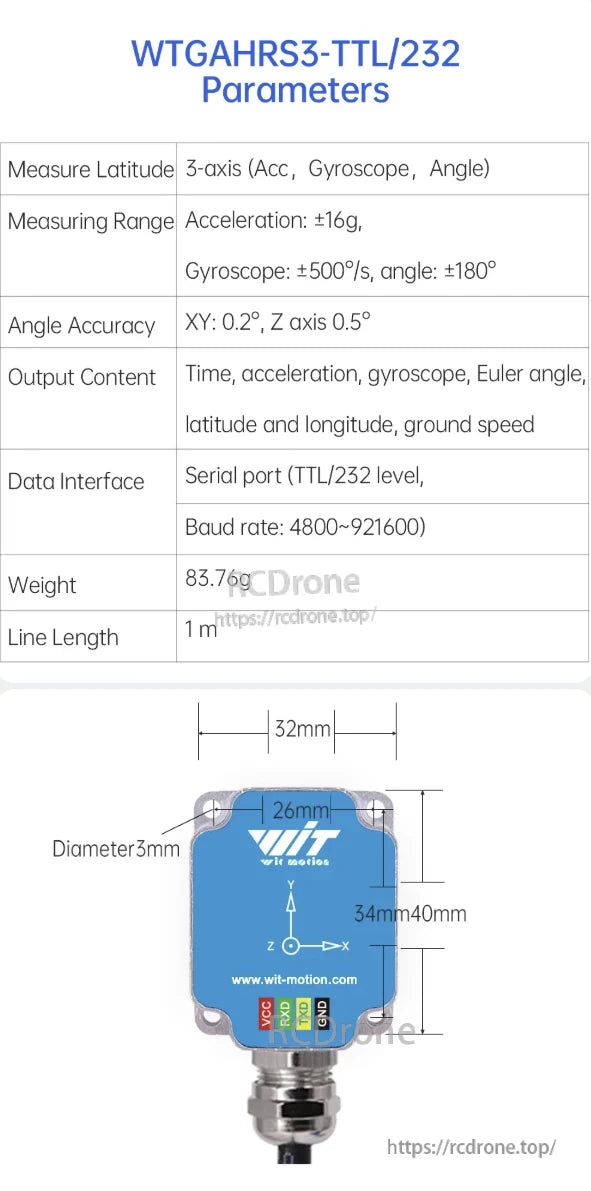
WitMotion WTGAHRS3-TTL/232 czujnik AHRS oferuje pomiar w 3 osiach z przyspieszeniem ±16g, żyroskopem ±500°/s, zakresem kątowym ±180°. Zapewnia czas, przyspieszenie, żyroskop, kąty Eulera, szerokość geograficzną, długość geograficzną, prędkość na ziemi za pośrednictwem TTL/232. Waży 83,76g, wymiary 40×34×26mm, długość przewodu 1m.

Czujniki WitMotion WTGAHRS3-485 i WTGAHRS3-GPS charakteryzują się szerokim zakresem napięcia wejściowego, niskim zużyciem energii oraz wysoką precyzją w pozycjonowaniu GPS/BD. Wspierają wiele systemów satelitarnych, szybki TTFF oraz protokoły RS485/MODBUS/NMEA0183, co zapewnia niezawodne działanie w ekstremalnych temperaturach.

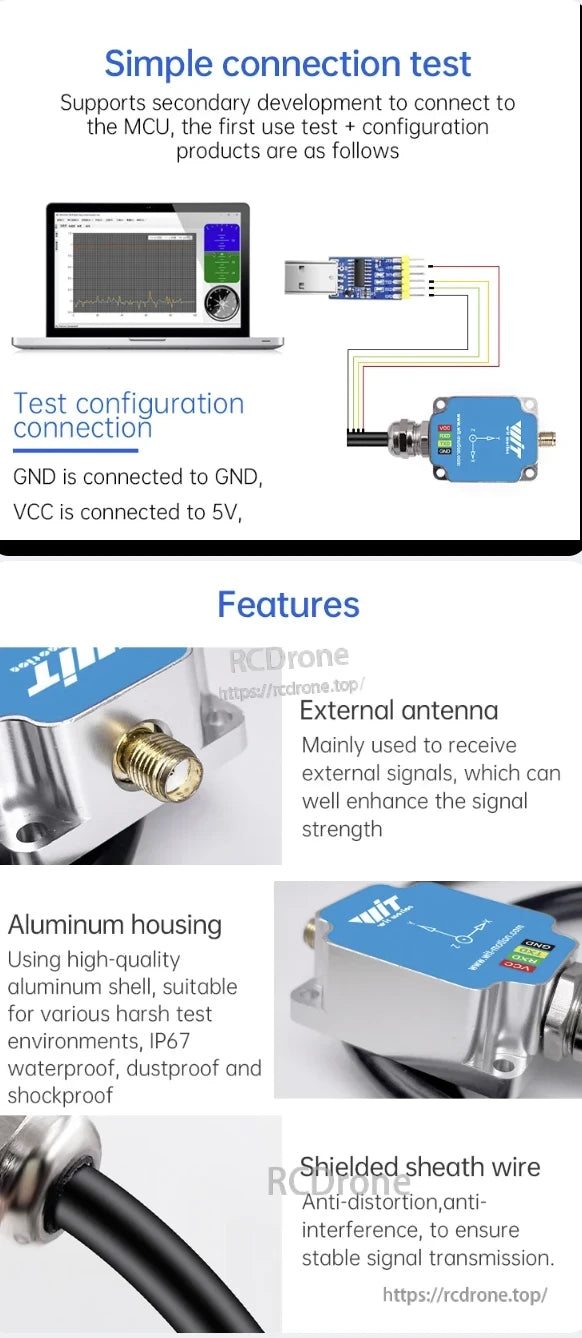
Czujnik AHRS WitMotion WTGAHRS3 posiada zewnętrzną antenę, aluminiową obudowę z ochroną IP67, ekranowany przewód oraz wspiera połączenie z MCU dla łatwego testowania.
Related Collections





