








Moduł WitMotion WTRTK-M ZED-F9P RTK GNSS GPS, pozycjonowanie centymetrowe dla UAV/samochodu, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
Moduł WitMotion WTRTK-M ZED-F9P RTK GNSS GPS, pozycjonowanie centymetrowe dla UAV/samochodu, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WTRTK-M to moduł RTK różnicowego pozycjonowania o wysokiej precyzji, oparty na silniku GNSS u-blox ZED-F9P. Śledzi GPS, GLONASS, Galileo, BeiDou i QZSS jednocześnie i zapewnia dokładność na poziomie centymetra po korekcji RTK. Moduł oferuje odbiór dualny, 5 Hz wyjście w czasie rzeczywistym do zastosowań mapowych/autonomicznych oraz narzędzie PC do konfiguracji stacji mobilnych/bazowych za pomocą jednego przycisku oraz wizualizacji tras. Technologie przeciwdziałania zakłóceniom i kalibracji zwiększają stabilność i bezpieczeństwo danych.
Kluczowe cechy
-
RTK na poziomie centymetra: mobilny/bazowy przepływ pracy z szybkim zbiegiem.
-
Wielokosmiczny, dualny: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Wysoka czułość &i szybki start: 184 kanały; zimny start 24 s, ciepły start 2 s, ponowne przechwycenie 2 s; zbieżność ≤10 s.
-
Wydajność czasu/kierunku: 1PPS RMS 30 ns (99% 60 ns); dokładność kierunku 0.4° (dynamiczna 0.3°).
-
Bogate protokoły: NMEA, UBX, RTCM 3.3; faza nośna (RAWX) wspierana.
-
Konfigurowalna częstotliwość &i 1 PPS: 0.25–20 Hz aktualizacja (domyślnie 1 Hz); drugi impuls 0.25 Hz–10 MHz (domyślny okres 1 s, poziom wysoki ~100 ns).
-
Podwójny UART (TTL) oraz anteny SMA-K / IPEX; oprogramowanie na PC do przeglądania ścieżek i konfiguracji urządzenia.
-
Sceny aplikacji: badania/mapping UAV, autonomiczne ciągniki/AGV, nawigacja pojazdów o wysokiej precyzji, robotyka.
Jak działa RTK (krótko)
Stacja bazowa oblicza błąd pomiaru satelitarnego w porównaniu do swojej znanej pozycji i nadaje dane różnicowe RTCM. Stacja mobilna stosuje te korekty, aby osiągnąć pozycjonowanie w czasie rzeczywistym na poziomie centymetra.
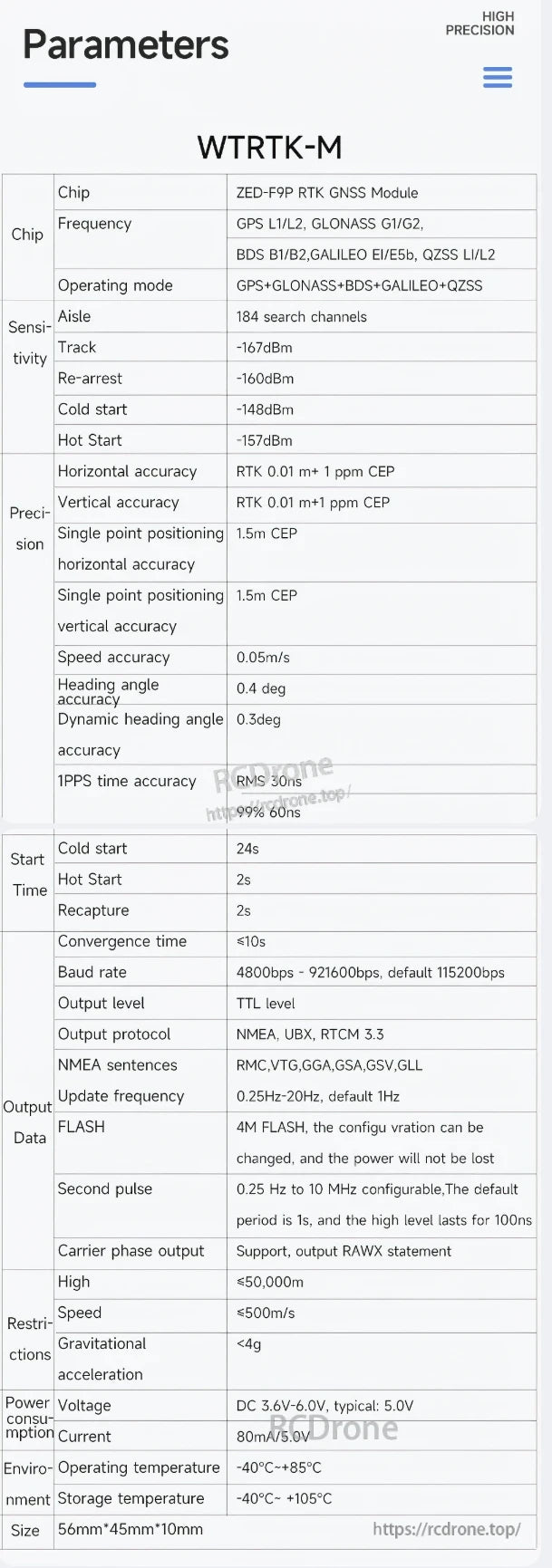
Specyfikacje podstawowe
| Przedmiot | Spec |
|---|---|
| Chip GNSS | Moduł RTK GNSS ZED-F9P |
| Konstelacje/Pasma | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Kanały | 184 kanały wyszukiwania |
| czułość | Śledzenie -167 dBm; ponowne uzyskanie -160 dBm; zimny start -148 dBm; gorący start -157 dBm |
| Dokładność RTK (CEP) | Pozioma/Wertykalna: 0.01 m + 1 ppm CEP |
| Dokładność jednopunktowa (CEP) | Pozioma 1.5 m, Wertykalna 1.5 m |
| Dokładność prędkości | 0.05 m/s |
| Dokładność kierunku | 0.4° (dynamiczna 0.3°) |
| Dokładność czasu 1PPS | RMS 30 ns, 99% 60 ns |
| Start/Przechwycenie | Zimne 24 s, Gorące 2 s, Przechwycenie 2 s; Zbieżność ≤10 s |
| Prędkość baud | 4 800–921 600 bps (domyślnie 115 200 bps) |
| Poziom elektryczny | TTL |
| Protokoły | NMEA, UBX, RTCM 3.3; Zdania NMEA: RMC/VTG/GGA/GSA/GSV/GLL |
| Częstotliwość aktualizacji | 0.25–20 Hz (domyślnie 1 Hz); uwaga: bardzo wysokie częstotliwości zwiększają obciążenie szeregowe—utrzymuj ≤ 5 Hz dla niezawodności |
| Pamięć flash na pokładzie | 4 MB, zachowuje konfigurację po wyłączeniu zasilania |
| Faza nośna | Obsługiwane wyjście RAWX |
| Ograniczenia | Wysokość ≤ 50 000 m; Prędkość ≤ 500 m/s; Przyspieszenie < 4 g |
| Zasilanie | DC 3.6–6.0 V (typ. 5.0 V), ≈ 80 mA @ 5 V |
| Operacja / Przechowywanie | -40 °C do +85 °C / -40 °C do +105 °C |
| Wymiary | 56 × 45 × 10 mm (oznaczenia na diagramie z przodu ~46 mm wysokości) |
Interfejsy &i wskaźniki
Antenna: SMA-K (z opcją IPEX).
Porty UART (TTL, 4-pin każdy):
-
P1 (prawo) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (lewo) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 jest używane do wejścia/wyjścia RTCM; P1 wyprowadza dane NMEA. P1/P2 VCC są wewnętrznie połączone—zasilanie z dowolnego z nich.
LED-y
-
PWR: Czerwony włączony = zasilanie podłączone.
-
TX1/TX2: Zielony miga = port ma dane wyjściowe.
-
PPS: Wyłączony przed ustaleniem; niebieski miga po 3D pozycjonowaniu.
-
RTK: Wyłączony, gdy nie jest w RTK; niebieski miga w RTK Float; włączony w RTK Fixed.
Połączenie &i Oprogramowanie
-
Ustawienie przewodowe: podłącz antenę do SMA; podłącz UART1 do PC, aby wyświetlić dane lokalizacyjne.
-
Podstawa/Mobilny: ustaw jeden moduł jako podstawę (wyjścia RTCM); mobilny konsumuje RTCM, aby osiągnąć RTK—mobilny może być używany bezpośrednio jako RTK rover po otrzymaniu poprawek.
-
Oprogramowanie PC: wizualizacja ścieżki, widok danych oraz konfiguracja podstawy/rovera jednym klawiszem.
Uwagi
-
Domyślna prędkość baud to 115 200 bps. Jeśli zwiększysz częstotliwość wyjściową, zwiększ prędkość baud odpowiednio, aby uniknąć przepełnienia (praktyczna górna granica ≤ 5 Hz na standardowych łączach).
-
Wsparcie dla rozwoju dostosowanego.
Szczegóły
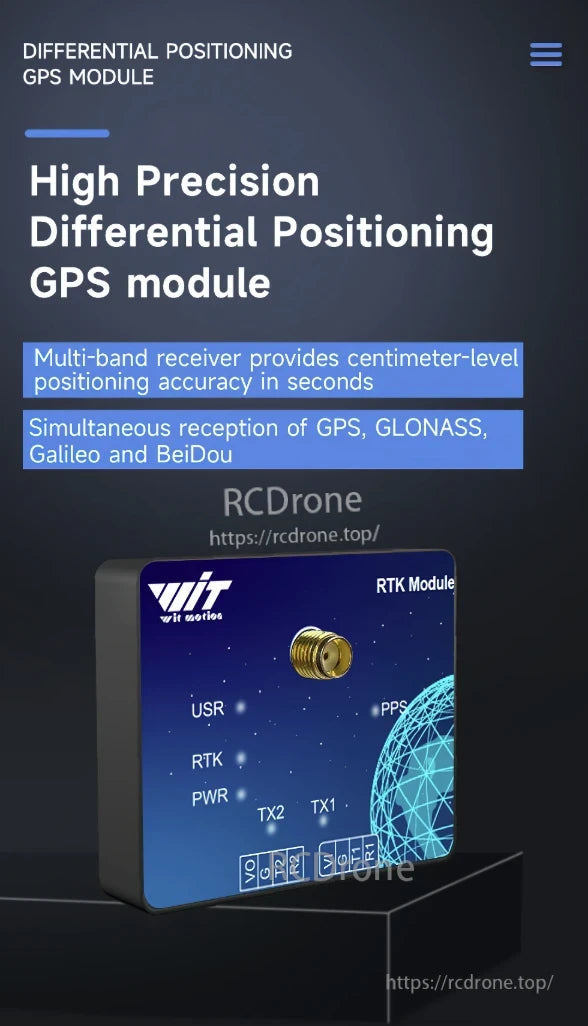
Moduł GPS do różnicowego pozycjonowania o wysokiej precyzji z dokładnością na poziomie centymetra. Obsługuje GPS, GLONASS, Galileo, BeiDou.Multi-bandowy odbiornik, technologia RTK, PPS, TX1, TX2, USR, RTK, wskaźniki PWR.
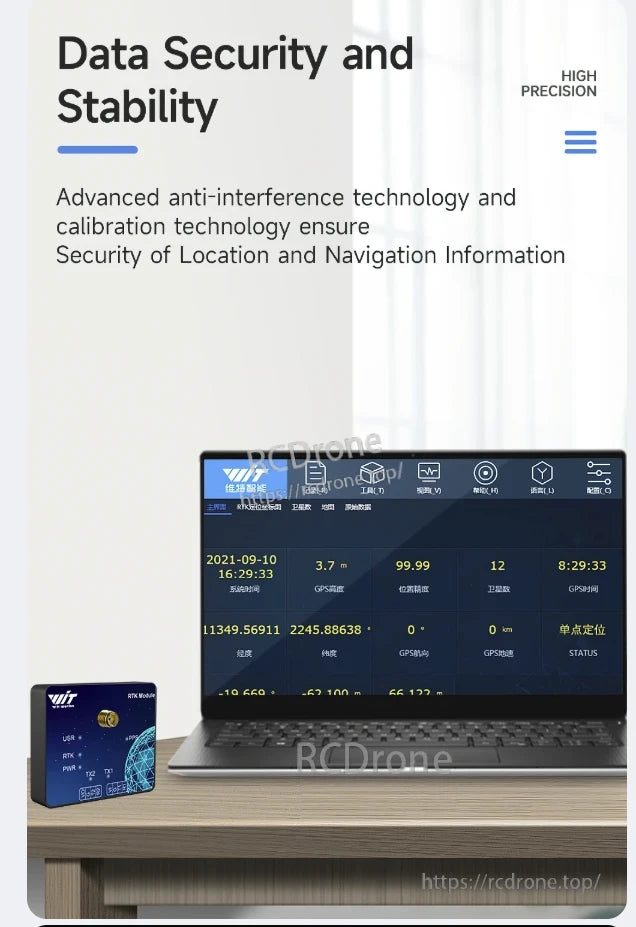
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS zapewnia wysoką precyzję, bezpieczeństwo danych i stabilność dzięki zaawansowanej technologii przeciwdziałania zakłóceniom i kalibracji, co gwarantuje niezawodne informacje o lokalizacji i nawigacji.
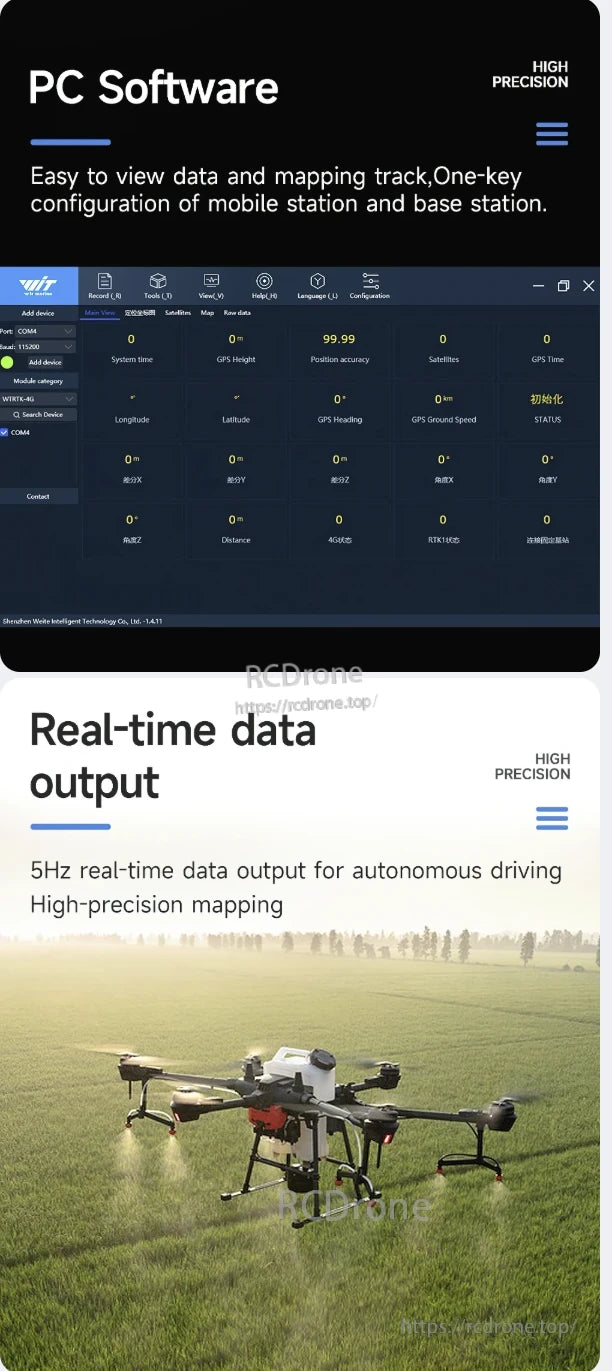
Oprogramowanie RTK GNSS GPS o wysokiej precyzji z wyjściem danych w czasie rzeczywistym 5Hz do autonomicznego prowadzenia i mapowania. Obsługuje konfigurację jednym przyciskiem, śledzenie satelitów, dokładne pozycjonowanie i szczegółową telemetrię.
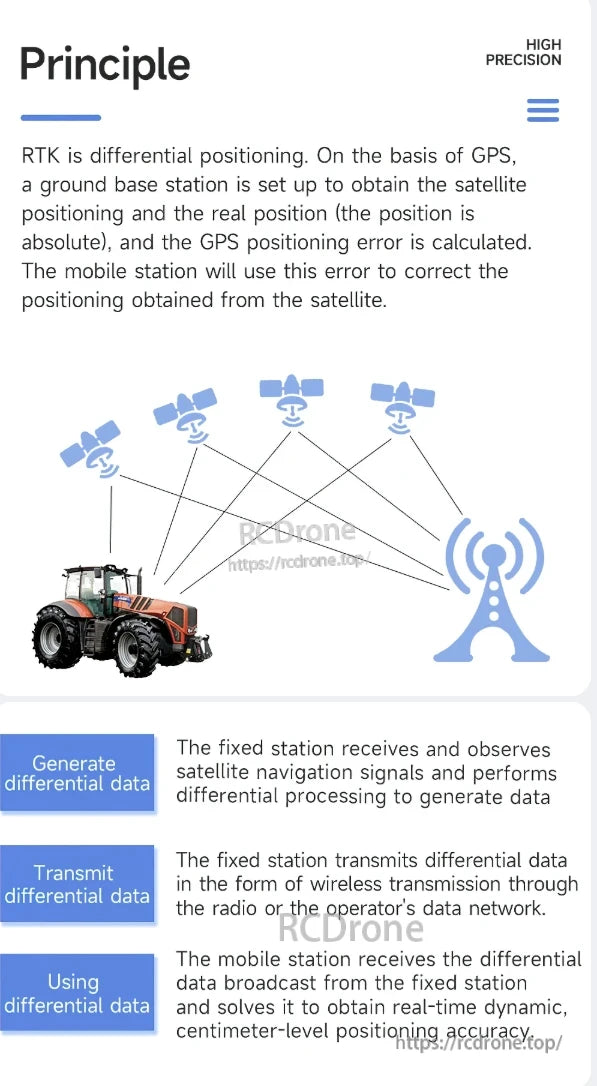
RTK wykorzystuje pozycjonowanie różnicowe z GPS. Stacja stała oblicza błędy pozycjonowania satelitarnego i przesyła korekty bezprzewodowo do stacji mobilnej, co umożliwia dokładność w czasie rzeczywistym na poziomie centymetra dla precyzyjnej nawigacji.
WTRTK-M wyposażony jest w moduł RTK GNSS ZED-F9P z obsługą wielu konstelacji, wysoką precyzję (0.01m), szybkie czasy uruchamiania, wiele protokołów i działa w temperaturze od -40°C do +85°C.


Diagram połączeń przewodowych dla modułu WitMotion RTK: konfiguracje stacji bazowej/mobilnej, anteny SMA, połączenia UART1 z komputerem. Zawiera oprogramowanie, podręcznik, wideo i zasoby protokołów.
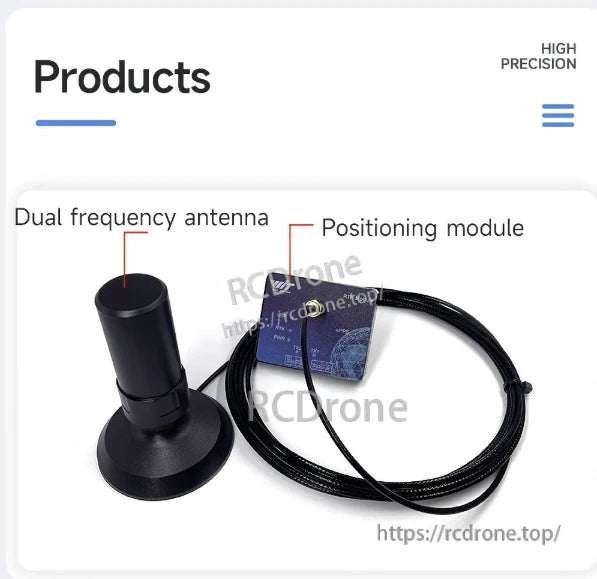
Podwójna antena częstotliwościowa i moduł pozycjonujący dla wysokiej precyzji GNSS GPS
Related Collections








