













Yahboom Muto RS 18DOF ROS2 Zestaw robota Hexapod z dużym modelem AI, LiDAR & kamerą głębi dla Raspberry Pi 5
Yahboom Muto RS 18DOF ROS2 Zestaw robota Hexapod z dużym modelem AI, LiDAR & kamerą głębi dla Raspberry Pi 5
Yahboom
Nie można załadować gotowości do odbioru
Przegląd
Yahboom Muto RS to bioniczny robot sześcionożny na poziomie biurkowym, oparty na systemie operacyjnym ROS2 i zaprojektowany do współpracy z Raspberry Pi (w tym opcje Raspberry Pi 5). Wykorzystuje korpus z całkowicie aluminiowego stopu i strukturę stawów 18 DOF napędzaną przez 18PCS 35KG serwomechanizmów szeregowych, a także integruje czujniki takie jak kamera głębi i LiDAR oraz moduł interakcji głosowej. Dzięki programowaniu w Python3 i wbudowanym algorytmom (w tym kinematyce odwrotnej), wspiera AI wizualną interakcję, mapowanie/nawigację SLAM, interakcję głosową, głębokie uczenie i symulację RViz dla rozwoju i edukacji ROS.
Kluczowe cechy
- 18 stawów ruchowych DOF z częściami strukturalnymi z aluminium; trzy stawy na nogę; 18 wysokowydajnych serwomechanizmów.
- 18PCS 35KG metalowe serwomechanizmy szeregowe dla stabilnej, skoordynowanej kontroli ruchu.
- Precyzyjna kontrola algorytmu odwrotnej kinematyki; wspiera chód trójkątny i regulowaną częstotliwość kroków.
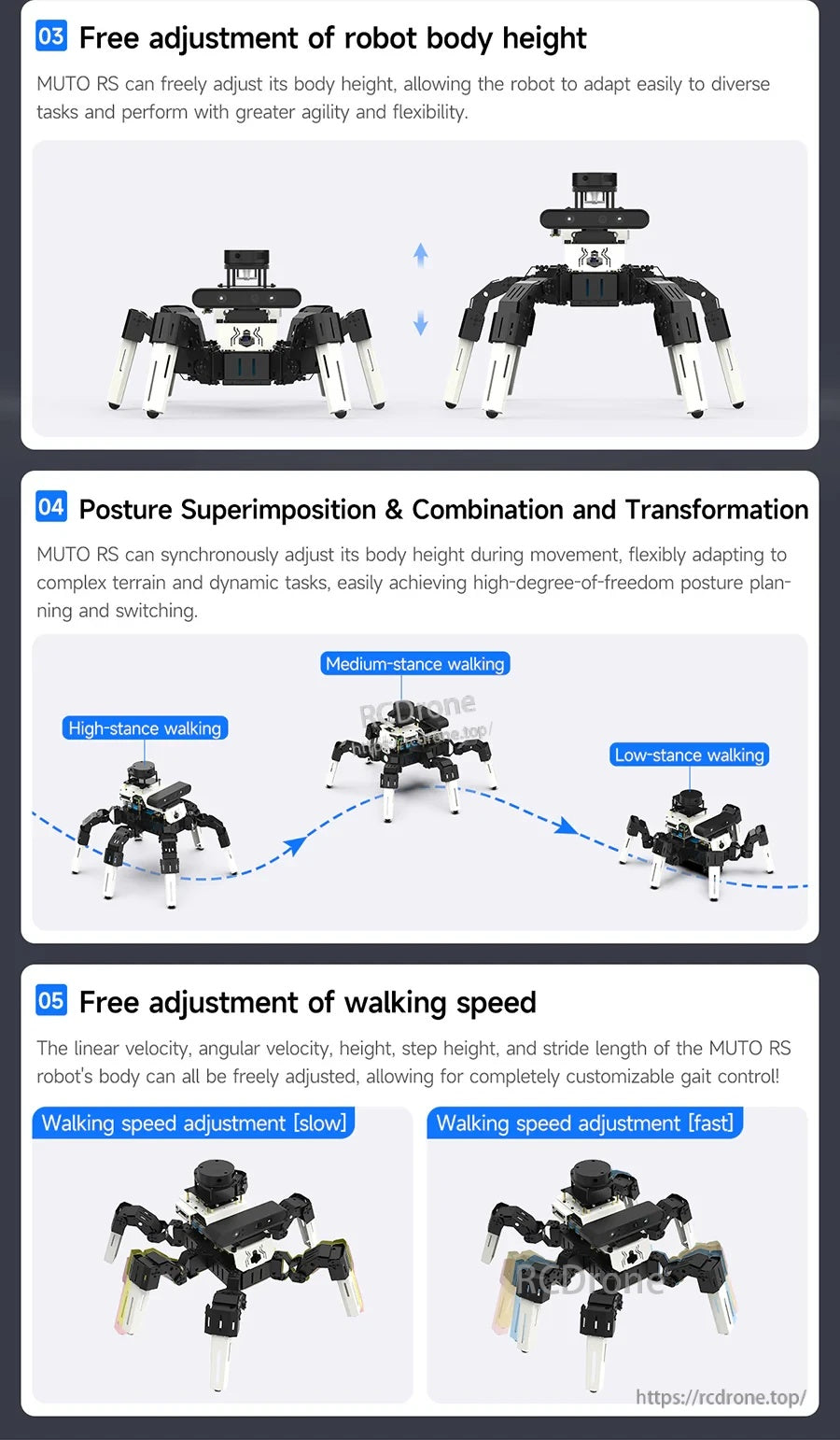
- Regulacja ruchu: translacja X/Y, obrót o 360°, regulacja wysokości ciała, nałożenie postawy (chód wysoki/średni/niski), oraz regulowana prędkość chodzenia (prędkość liniowa, prędkość kątowa, wysokość, wysokość kroku, długość kroku).
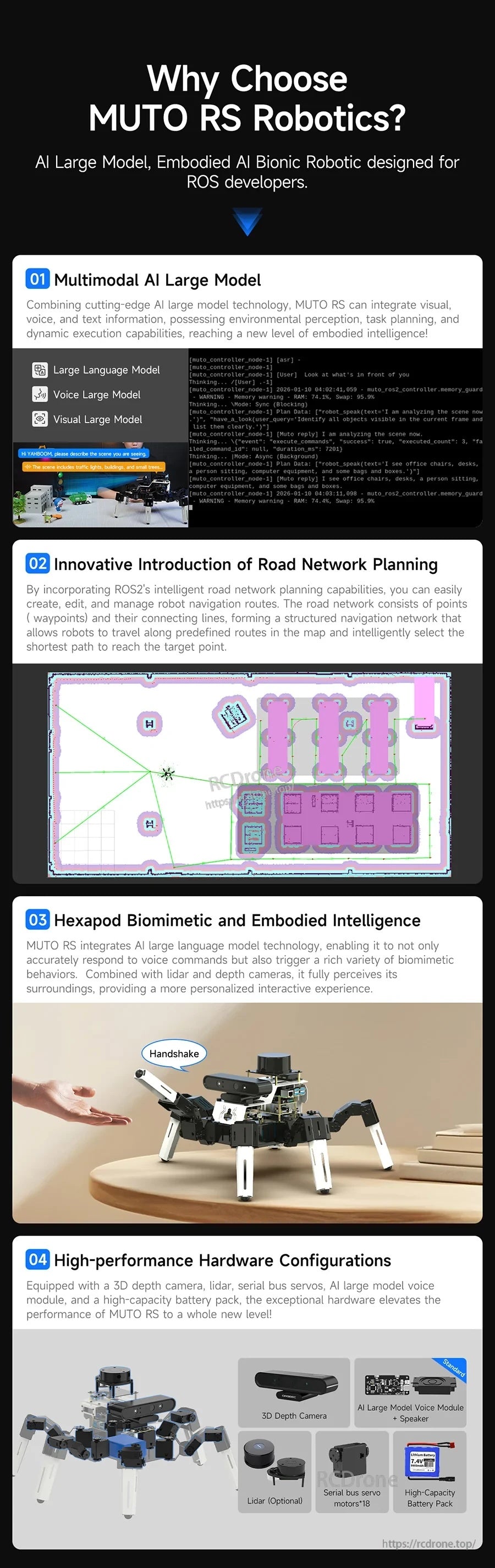
- Integracja dużego modelu AI w trybie multimodalnym: skalowalna baza wiedzy RAG, architektura dynamicznego wnioskowania dwumodalnego sprzężenia zwrotnego, zrozumienie semantyki tekstu i naturalny dialog mowy.
- Kamera głębi + rozpoznawanie wizualne: wykrywanie przeszkód kamerą głębi, mapowanie 3D w czasie rzeczywistym, pomiar odległości głębi i rozpoznawanie chmury punktów 3D.
- Percepcja środowiska oparta na LiDAR: 360° wszechkierunkowe czujniki, mapowanie i nawigacja, planowanie ścieżki, dynamiczne unikanie przeszkód, nawigacja wielopunktowa i planowanie sieci drogowej.
- Obsługiwane frameworki/algorytmy (wymienione): MediaPipe, OpenCV; Gmapping, Cartographer; slam_toolbox; Radar odometr RF2O; planowanie ścieżki DWA.
- Funkcje interakcji wizualnej AI (wymienione): śledzenie obiektów KCF, śledzenie kolorów, kontrola poleceń kodów QR, śledzenie linii wizualnej.
- Interaktywna kontrola głosowa: polecenia głosowe mogą kontrolować stan ruchu; obsługuje funkcje takie jak śledzenie kolorów, rozpoznawanie kolorów i patrolowanie linii wizualnej.
- Kontrola międzyplatformowa: aplikacja zdalnego sterowania iOS/Android, aplikacja nawigacji mapowej iOS/Android, kontrola komputera PC oraz kontrola bezprzewodowa 2.4G/USB.
- FPV transmisja wideo w czasie rzeczywistym: połącz się z siecią lokalną za pomocą aplikacji mobilnej, aby oglądać w czasie rzeczywistym wideo HD nagrane przez robota.
- Kontrola interkonekcji wielu maszyn: wspiera jednoczesną nawigację wielu robotów z dynamicznym omijaniem przeszkód na tej samej mapie oraz synchroniczną kontrolę za pomocą jednego komputera głównego.
- Tryb nauczania: ręczny ruch pojedynczej nogi na robocie głównym może być odwzorowany przez robota podrzędnego wykonującego tę samą czynność.
- Zasoby edukacyjne: odniesiono się do „200+ przykładów kursów”; opisano towarzyszące kursy ROS i przykłady zastosowania dużego modelu językowego AI (adres URL tutorialu usunięty dla zgodności).
W celu uzyskania pomocy przy wyborze przed zakupem lub wsparcia przy konfiguracji, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected].
Specyfikacje
| Model | Muto RS |
| Typ robota | AI Duży Model ROS Robot Hexapod |
| DOF | 18 DOF stawów |
| Materiał korpusu | Stop aluminium (odniesienie do korpusu ze stopu aluminium) |
| Serwomechanizmy | 18 sztuk 35KG serwomechanizmów szeregowych (metalowe) |
| System operacyjny / rozwój | ROS2; Python3; obsługuje symulację RViz; rozwój w kontenerze docker (odniesienie) |
| Czujniki / moduły (odniesienie) | Kamera głębi; LiDAR; moduł interakcji głosowej; pakiet baterii o dużej pojemności |
| Kamera głębi (wymieniona) | Kamera głębi Astra Pro Plus |
Różnice w konfiguracji (jak wymieniono)
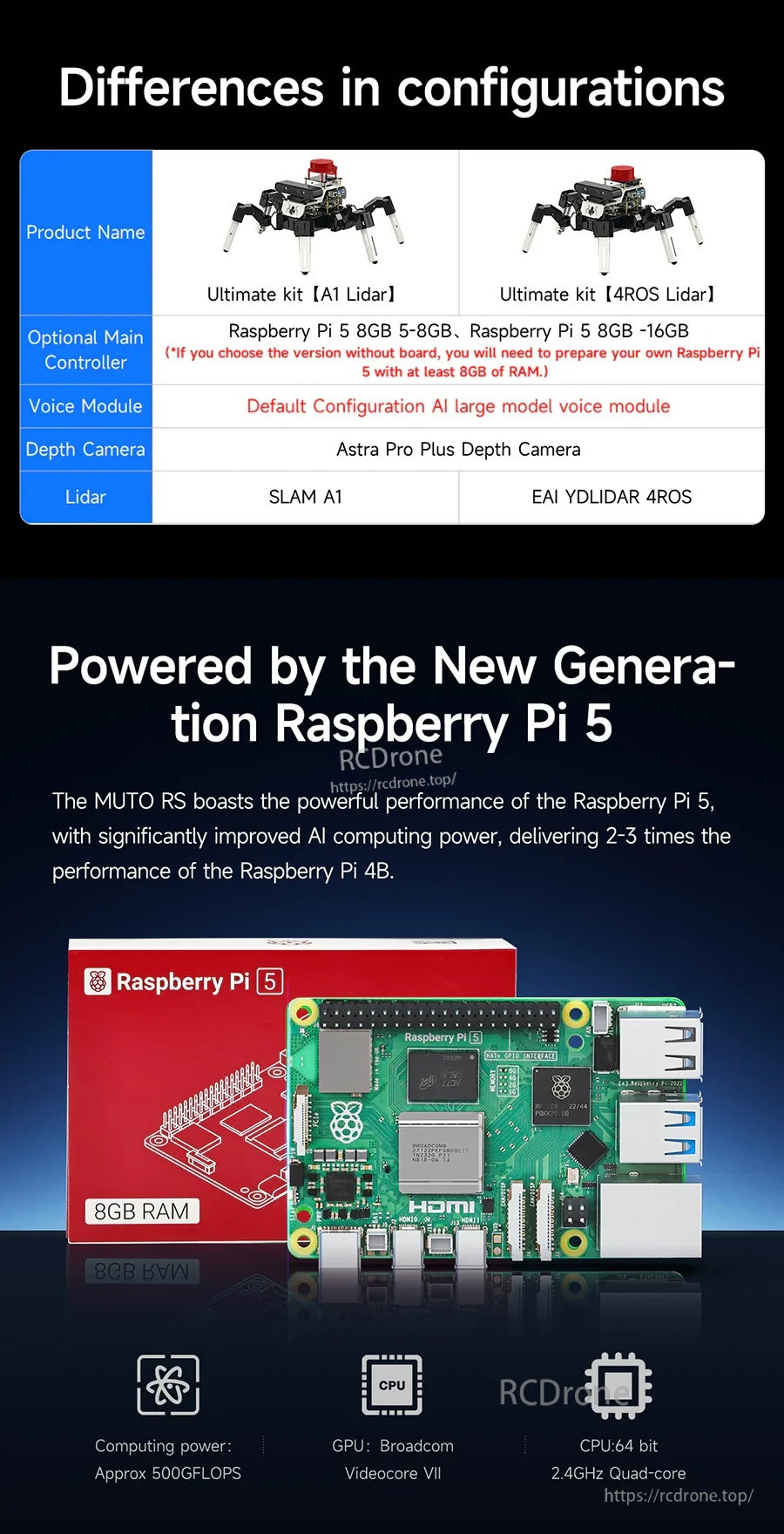
| Przedmiot | Ultimate kit [A1 Lidar] | Ultimate kit [4ROS Lidar] |
|---|---|---|
| Opcjonalny główny kontroler | Raspberry Pi 5 8GB | Raspberry Pi 5 8GB–16GB |
| Uwaga (wymienione) | Jeśli wybierasz wersję bez płyty, przygotuj Raspberry Pi 5 z co najmniej 8GB RAM. | |
| Moduł głosowy | Domyślna konfiguracja: Moduł głosowy dużego modelu AI | |
| Kamera głębi | Kamera głębi Astra Pro Plus | |
| LiDAR | SLAM A1 | EAI YDLIDAR 4ROS |
Raspberry Pi 5 (informacje pokazane)
| Pamięć RAM (pokazana) | 8GB RAM |
| Moc obliczeniowa (pokazana) | Około 500GFLOPS |
| GPU (pokazane) | Broadcom Videocore VII |
| CPU (pokazane) | 64-bitowy czterordzeniowy 2.4GHz |
| Oświadczenie o wydajności (pokazane) | 2–3 razy większa wydajność niż Raspberry Pi 4B (jak podano) |
Zastosowania
- Nauka i rozwój ROS2 dla wielonożnej (heksapod) lokomocji i odwrotnej kinematyki.
- Eksperymenty z mapowaniem/nawigacją SLAM: nawigacja punktowa i wielopunktowa, planowanie sieci drogowej oraz unikanie dynamicznych przeszkód.
- Projekty z zakresu widzenia komputerowego i percepcji z użyciem kamery głębi i wizualnego rozpoznawania AI (odniesienia do OpenCV / MediaPipe).
- Interakcja głosowa i demonstracje dużych modeli multimodalnych (odniesienia do integracji tekst/głos/wizualizacja).
- Synchronizacja i nawigacja wielorobotowa (odniesienia do sterowania między maszynami).
Instrukcje
Materiały instruktażowe są odniesione dla tego produktu (wspomniana strona producenta; zewnętrzny URL usunięty dla zgodności).
Szczegóły
Zbudowany na ROS2 dla Raspberry Pi, Muto RS łączy mobilność hexapoda z 18 stopniami swobody z percepcją AI dla nauki robotyki na biurku.

Od mapowania i nawigacji SLAM po interakcję wizualną i głosową, platforma jest zaprojektowana jako wszechstronny zestaw do rozwoju ROS2.
Multimodalne przepływy pracy AI łączą się z koncepcjami planowania sieci drogowej, wspierając demonstracje badawcze i nauczanie w klasie.
Wybierz konfigurację, która odpowiada Twoim potrzebom dotyczącym kontrolera i czujników, z opcjami skoncentrowanymi na Raspberry Pi compute.
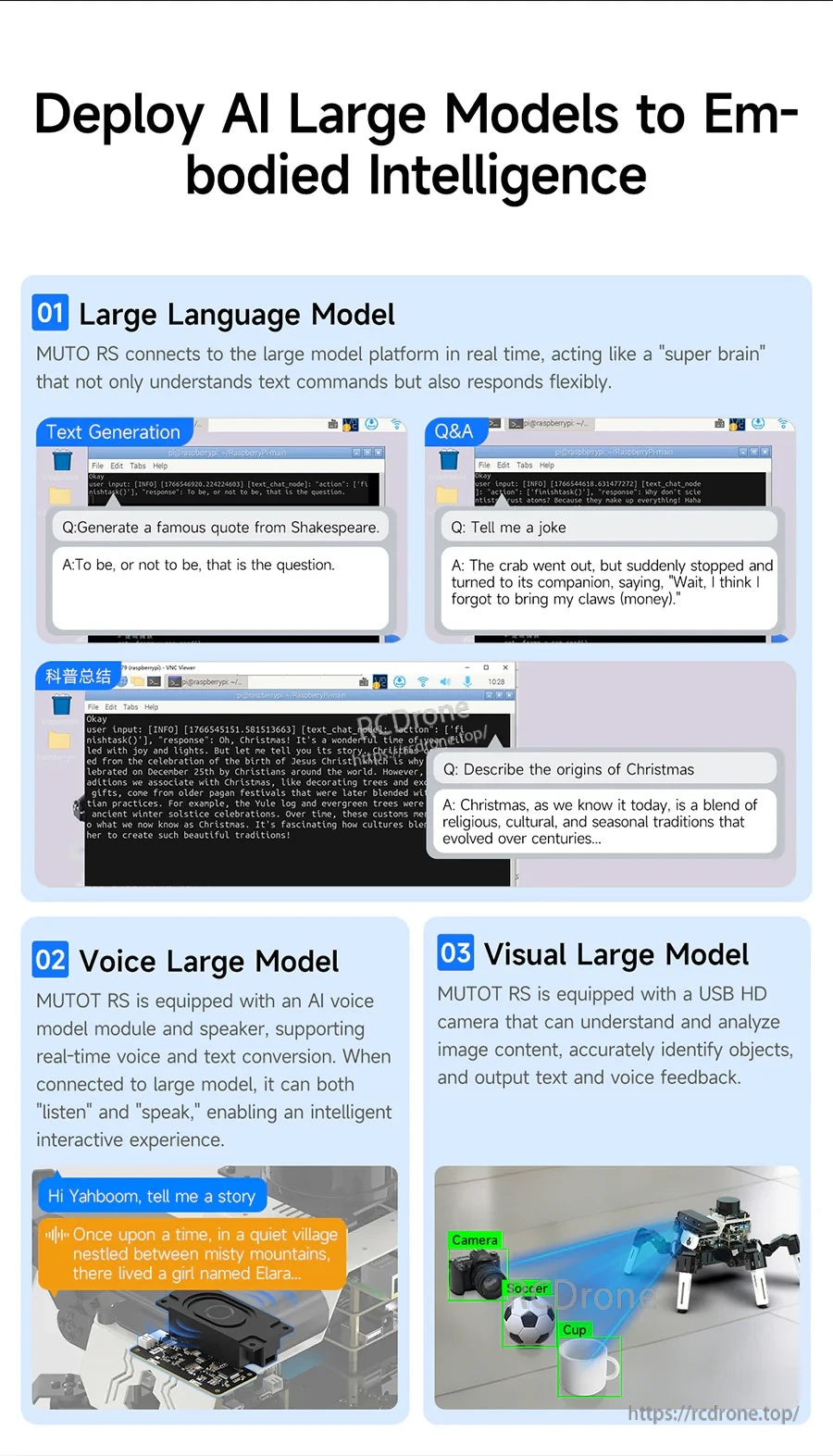
Modele tekstowe, głosowe i wizualne mogą być zintegrowane w celu budowania zachowań inteligencji ucieleśnionej w Pythonie i ROS2.

Używaj poleceń wysokiego poziomu do zadań związanych z ruchem, percepcją Q&A, śledzeniem celów i autonomiczną nawigacją.
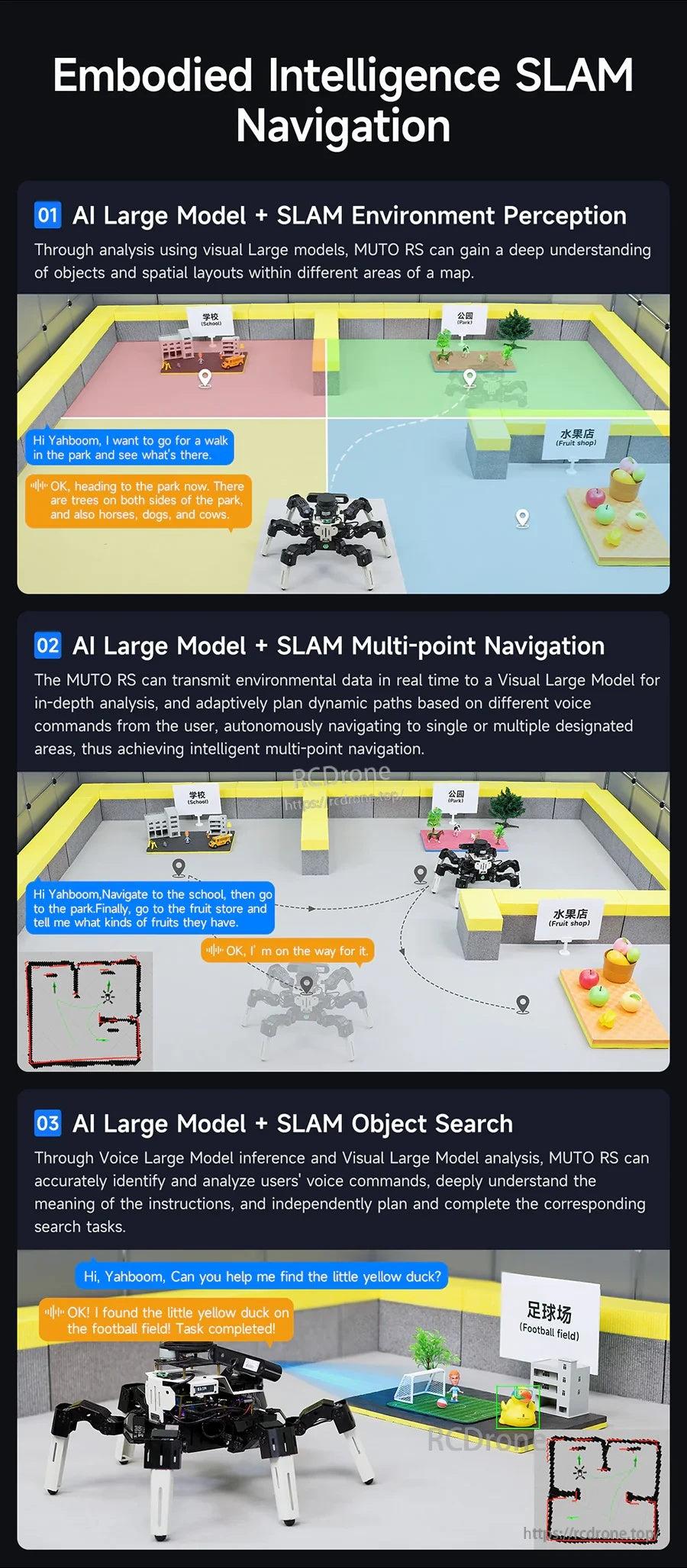
Percepcja oparta na SLAM wspiera nawigację wielopunktową i zachowania związane z wyszukiwaniem celów w zmapowanych środowiskach.
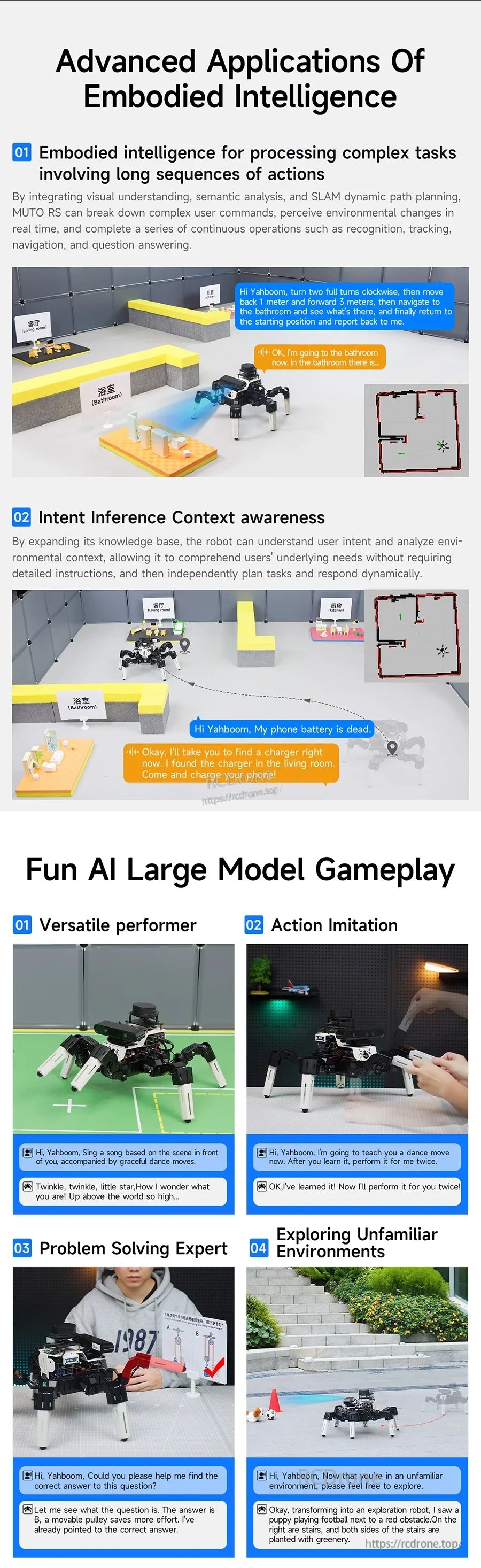
Demonstracje interakcji na wyższym poziomie obejmują rozumienie intencji, zachowania uczenia się przez naśladowanie i eksplorację środowiska.
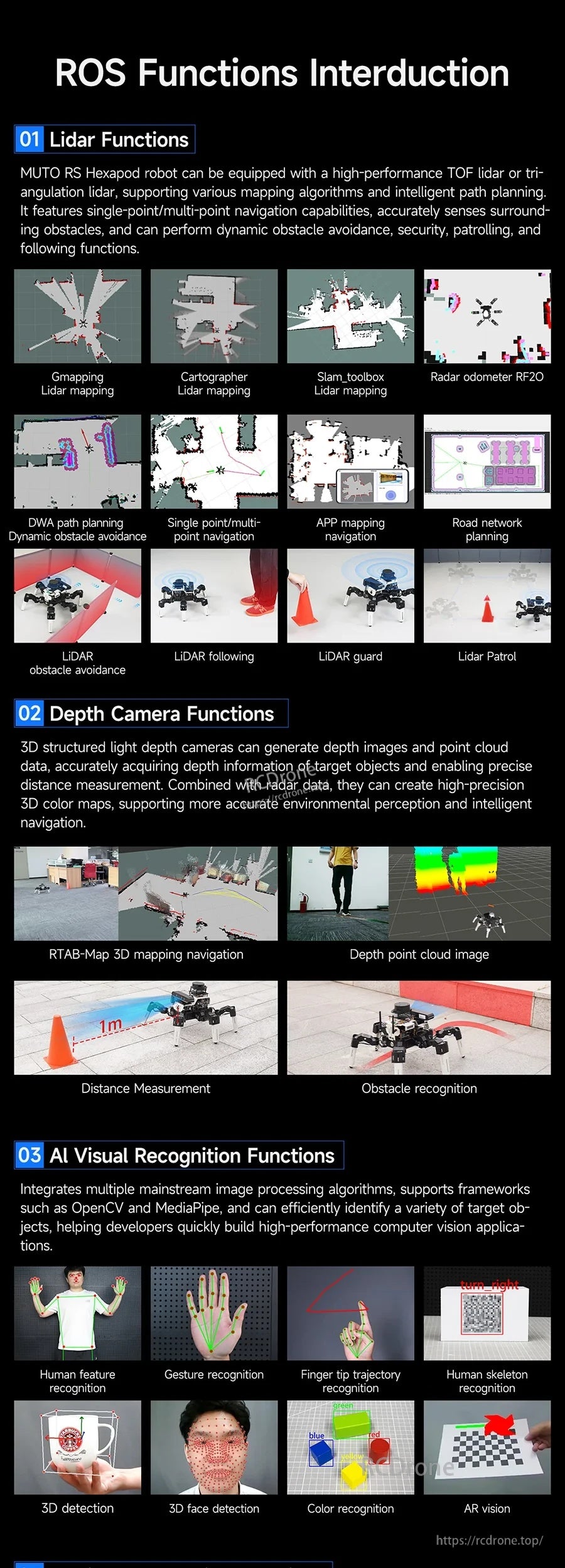
Wbudowane pakiety ROS2 łączą dane z LiDAR i kamery głębi do mapowania, chmur punktów i świadomości przeszkód.
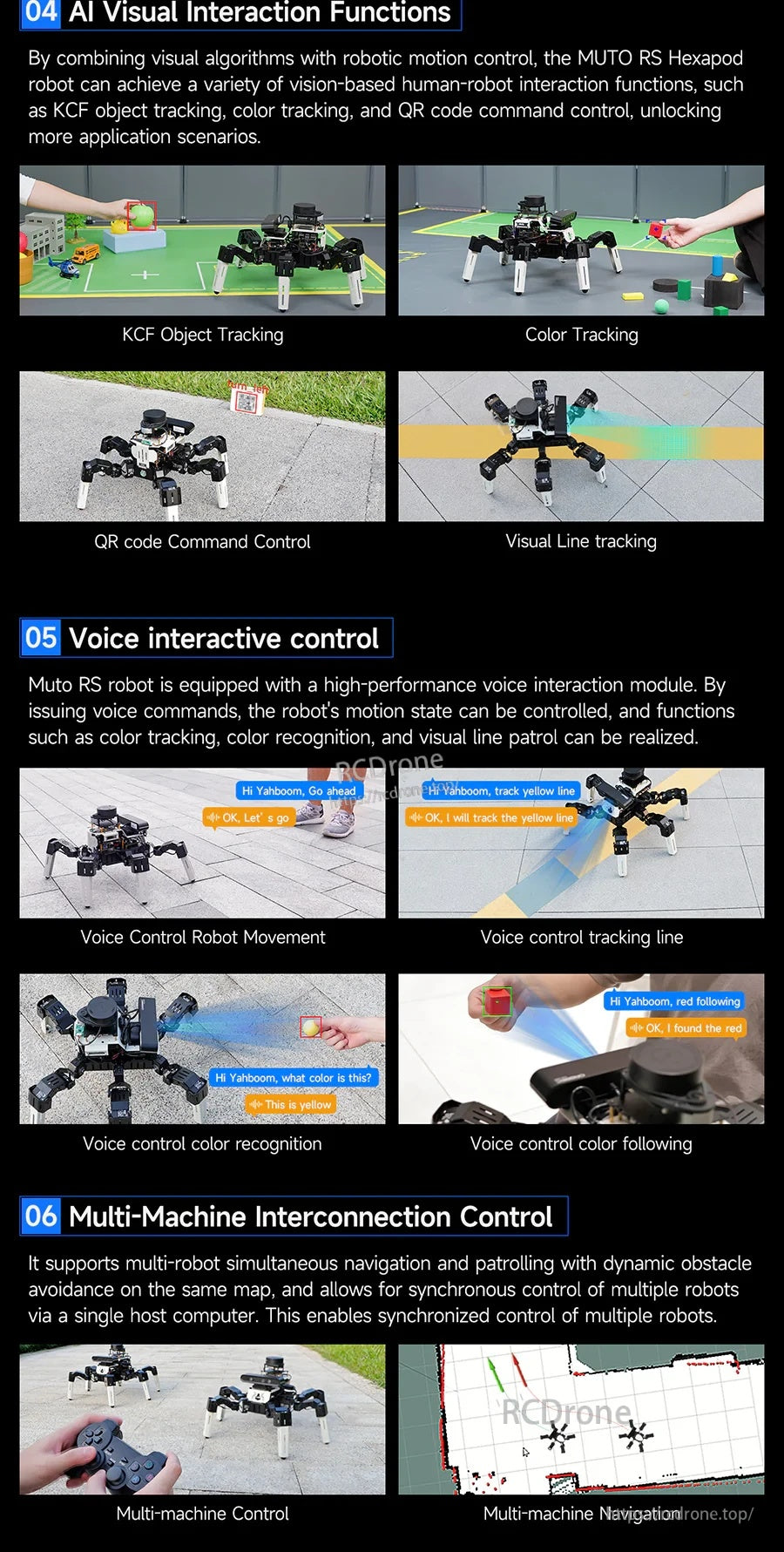
Algorytmy wizyjne i komendy głosowe umożliwiają bezdotykowe sterowanie, z obsługą funkcji koordynacji wielu robotów.

Tryb nauczania i pełny układ 18-DOF ułatwiają demonstrowanie chodu i skoordynowanego ruchu nóg.

Odwrotna kinematyka i planowanie chodu pomagają przekształcić ustawienia postawy i kroku w stabilny ruch heksapoda.
Dostosuj wysokość ciała, postawę i prędkość chodzenia do różnych powierzchni, demonstracji i scenariuszy nawigacyjnych.
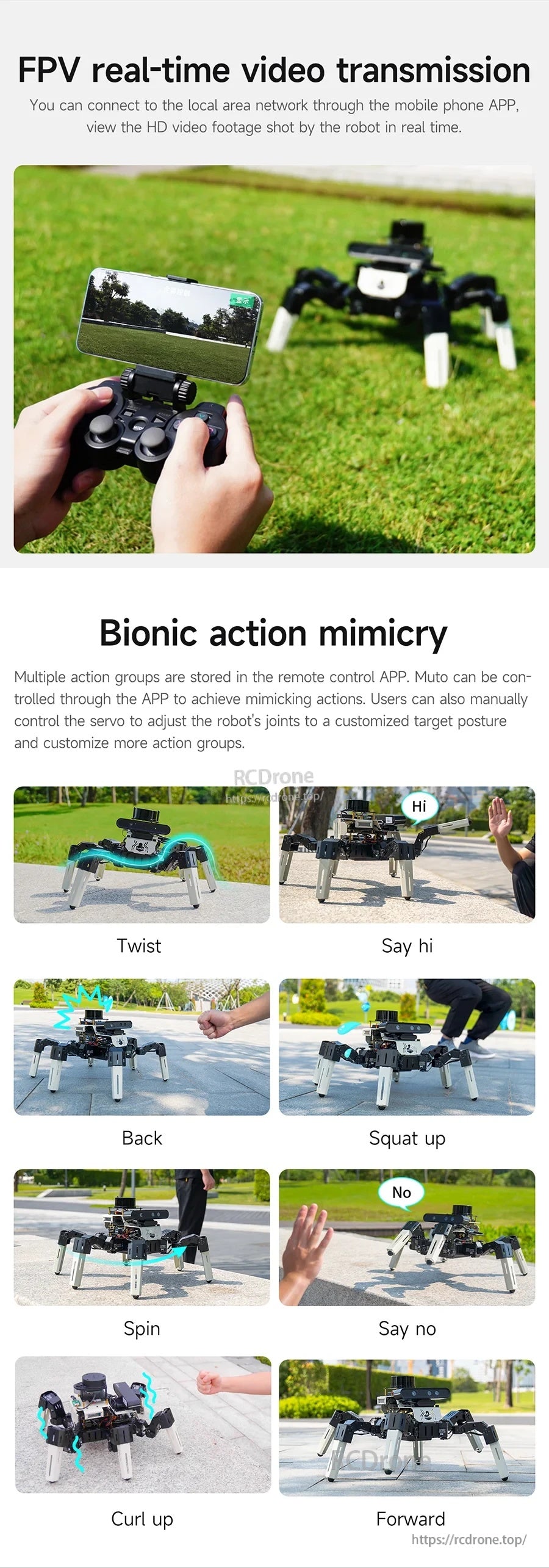
Wideo FPV i zachowania naśladujące akcje sprawiają, że demonstracje są bardziej interaktywne dla laboratoriów, klubów i prezentacji.
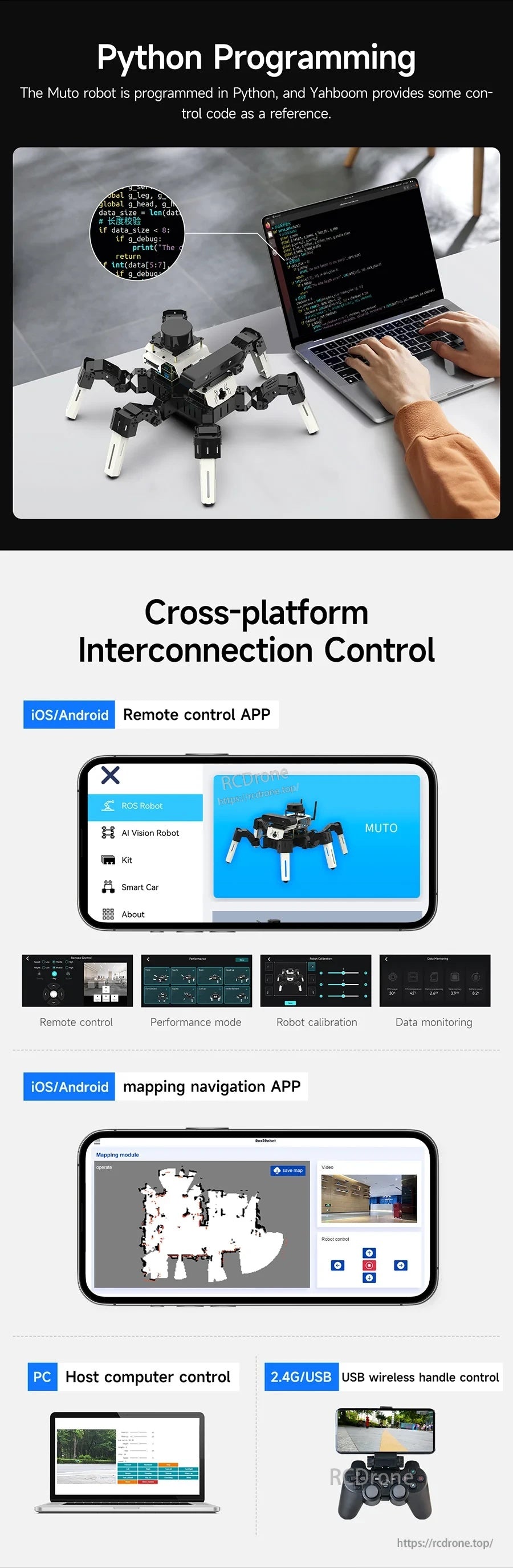
Programuj w Pythonie i kontroluj robota z aplikacji mobilnych, hosta PC lub bezprzewodowego uchwytu w zależności od konfiguracji.
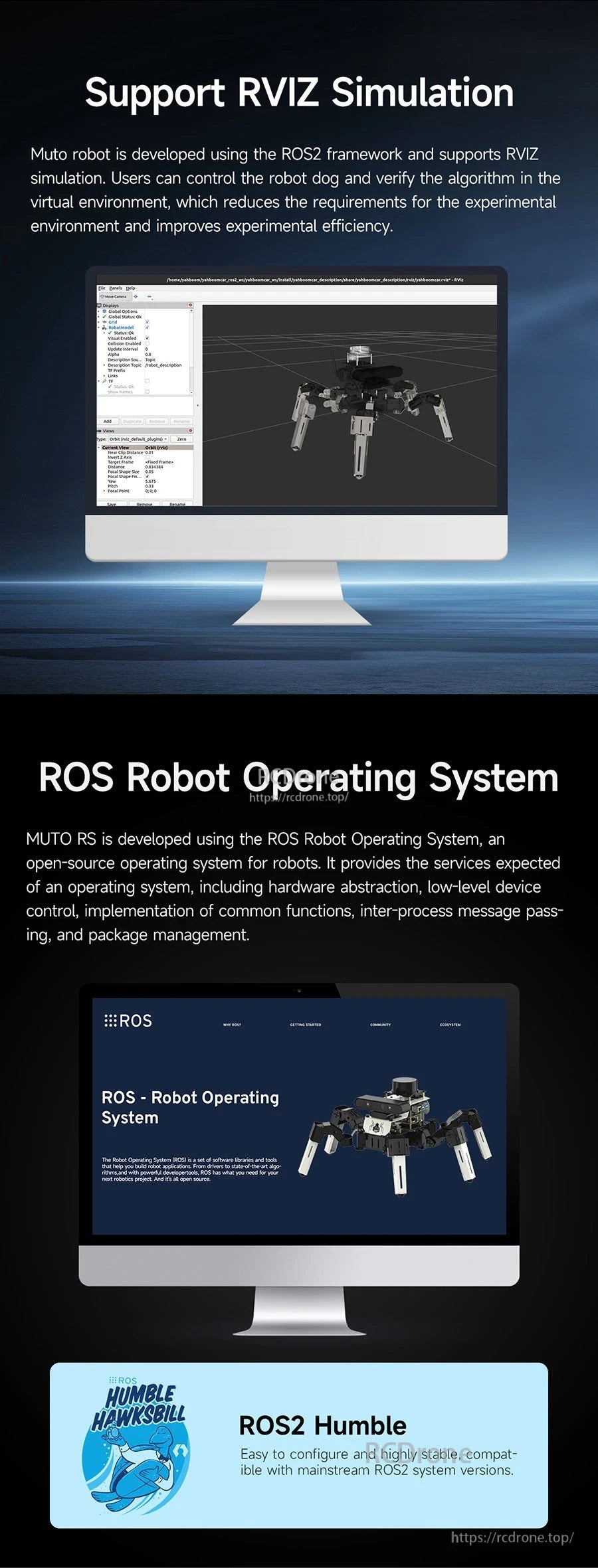
Opracuj i przetestuj w symulacji RViz, a następnie wdroż do stosu ROS2 dla powtarzalnych eksperymentów z robotyką.
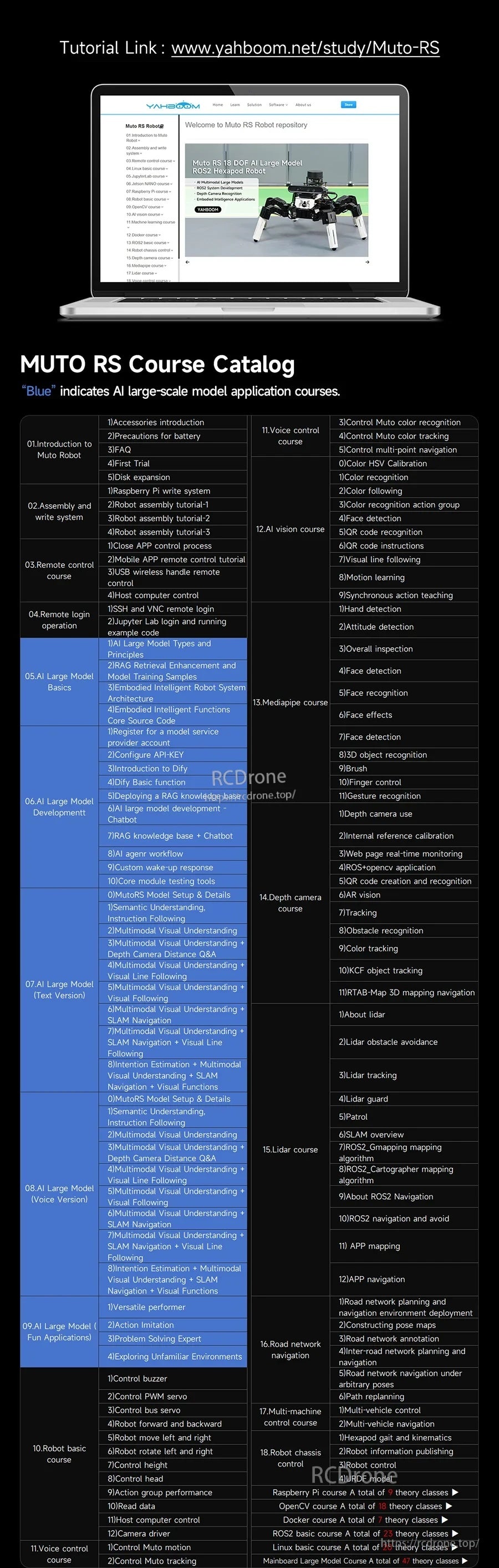
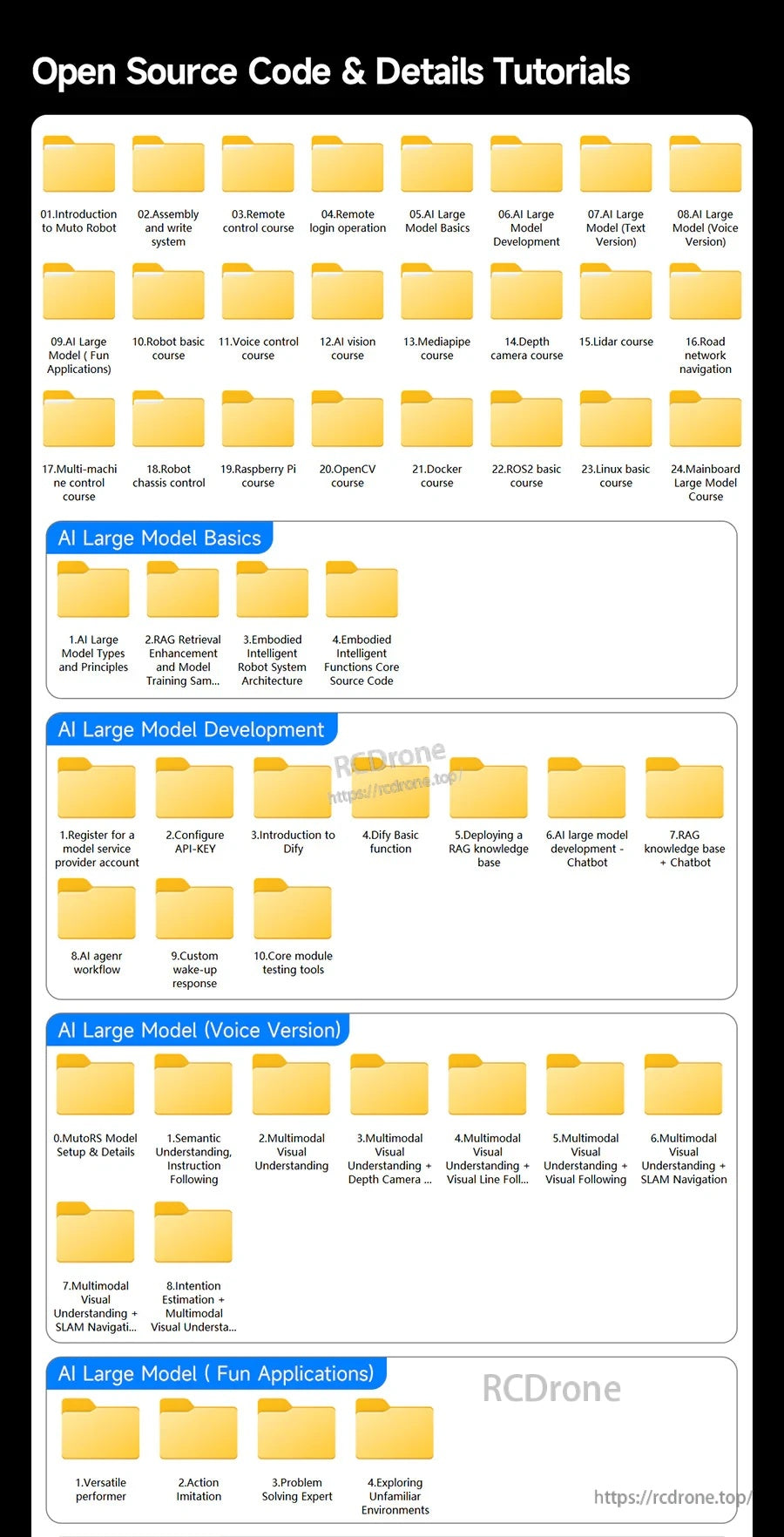
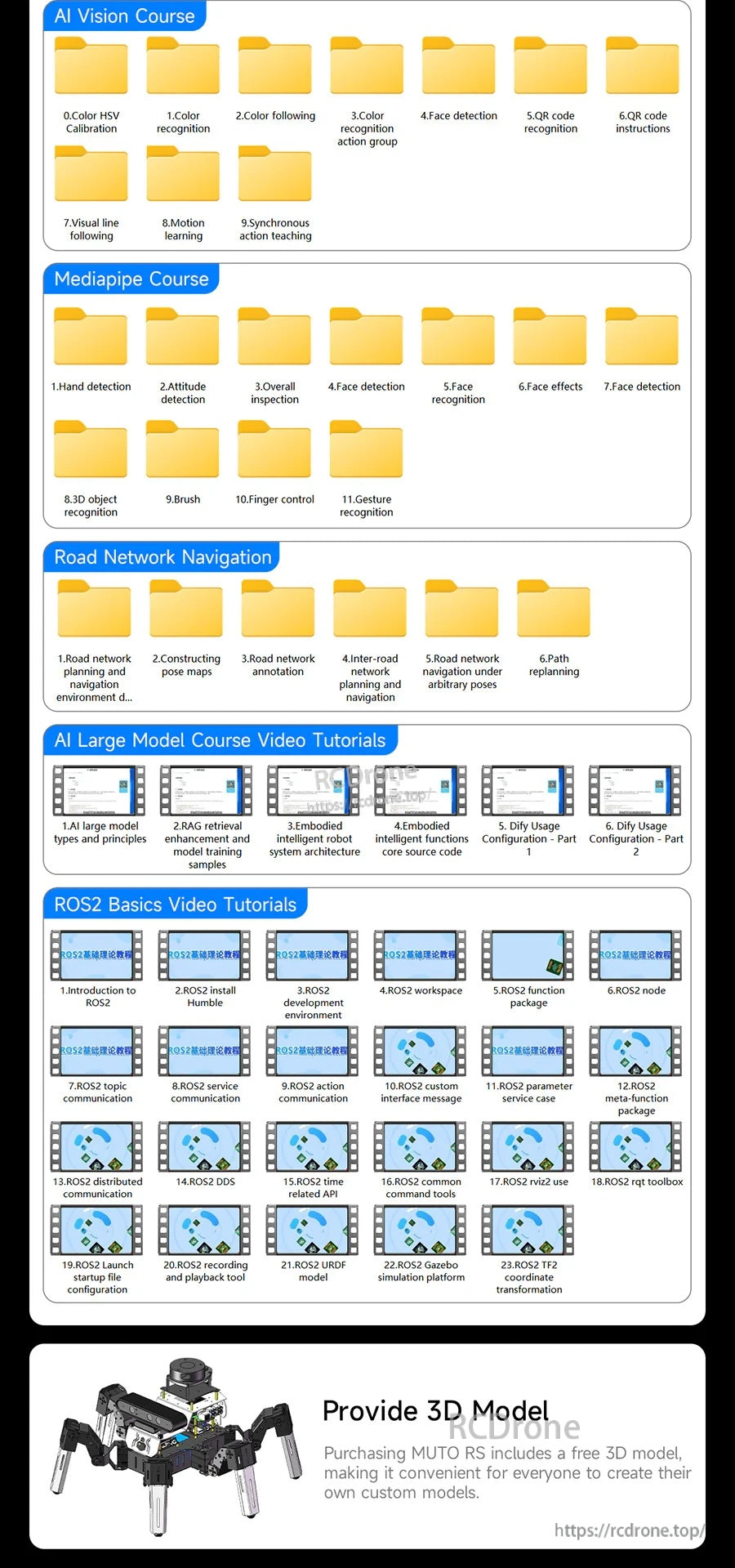
Materiały edukacyjne Yahboom Muto RS ROS2 obejmują wizję AI, Mediapipe, nawigację w sieci drogowej oraz podstawowe samouczki wideo ROS2.

Hexapod Muto RS wykorzystuje modułowy stos z komponentami takimi jak lidar, kamera głębi, kontroler Raspberry Pi i serwomechanizmy magistrali szeregowej do skoordynowanego ruchu nóg.

Orbbec Astra Pro Plus do wykrywania głębi i moduł 2D LiDAR SLAM dostarczają dane o głębi i mapowaniu dla projektów robotycznych ROS2.
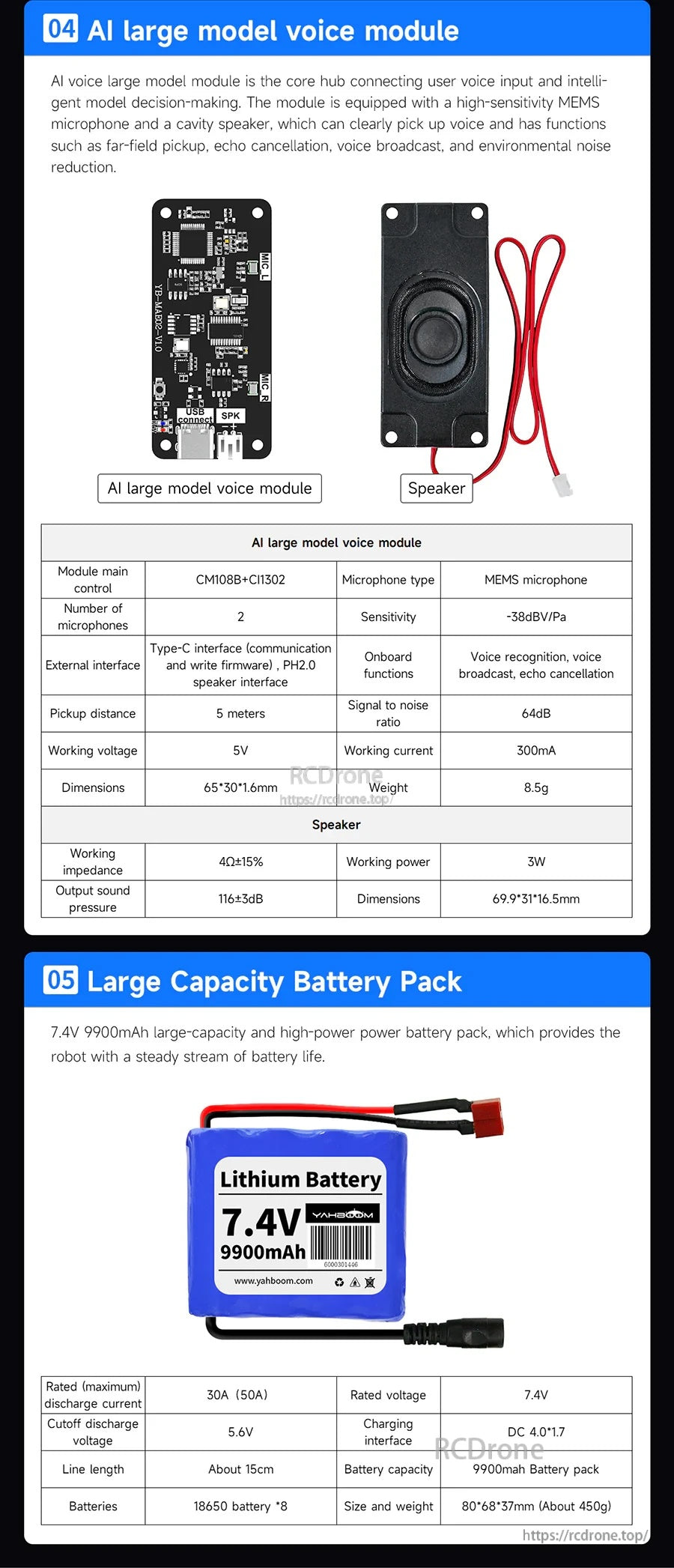
Zestaw zawiera moduł głosowy AI z przewodowym głośnikiem oraz akumulator litowy 7.4V 9900mAh do zasilania na pokładzie.
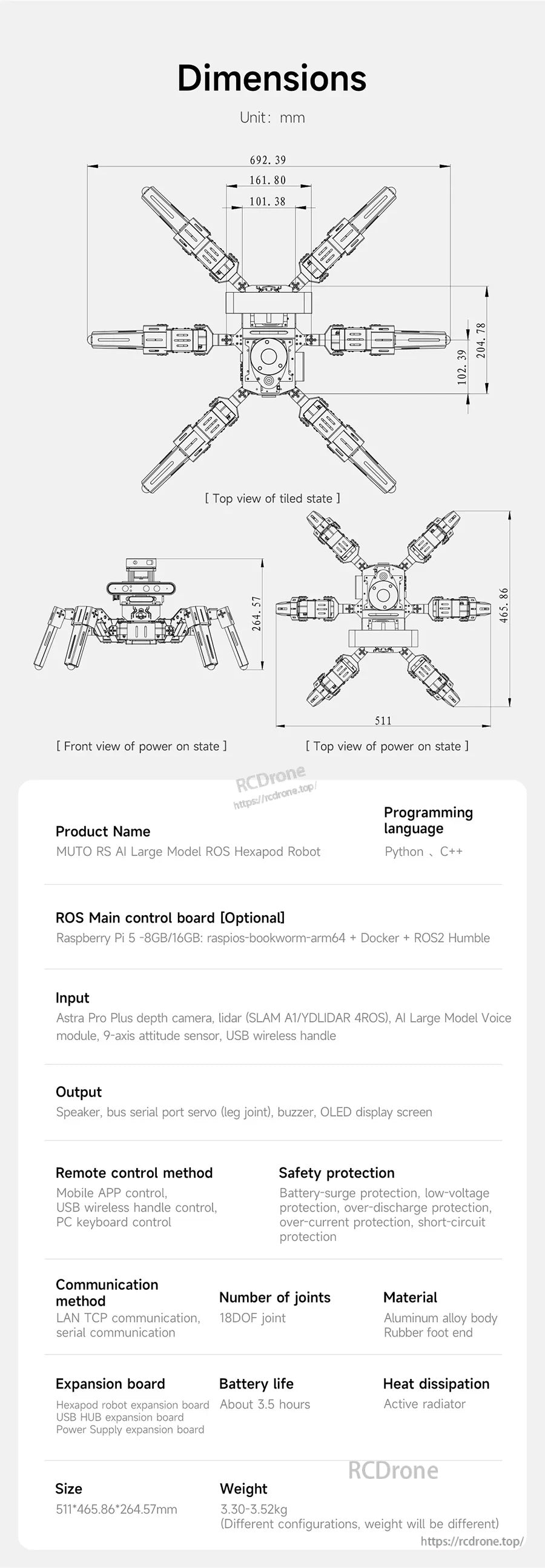
Hexapod Yahboom Muto RS ROS2 zawiera odniesienie do wymiarów mm z wieloma widokami, aby pomóc w planowaniu prześwitu montażowego i rozmieszczenia.
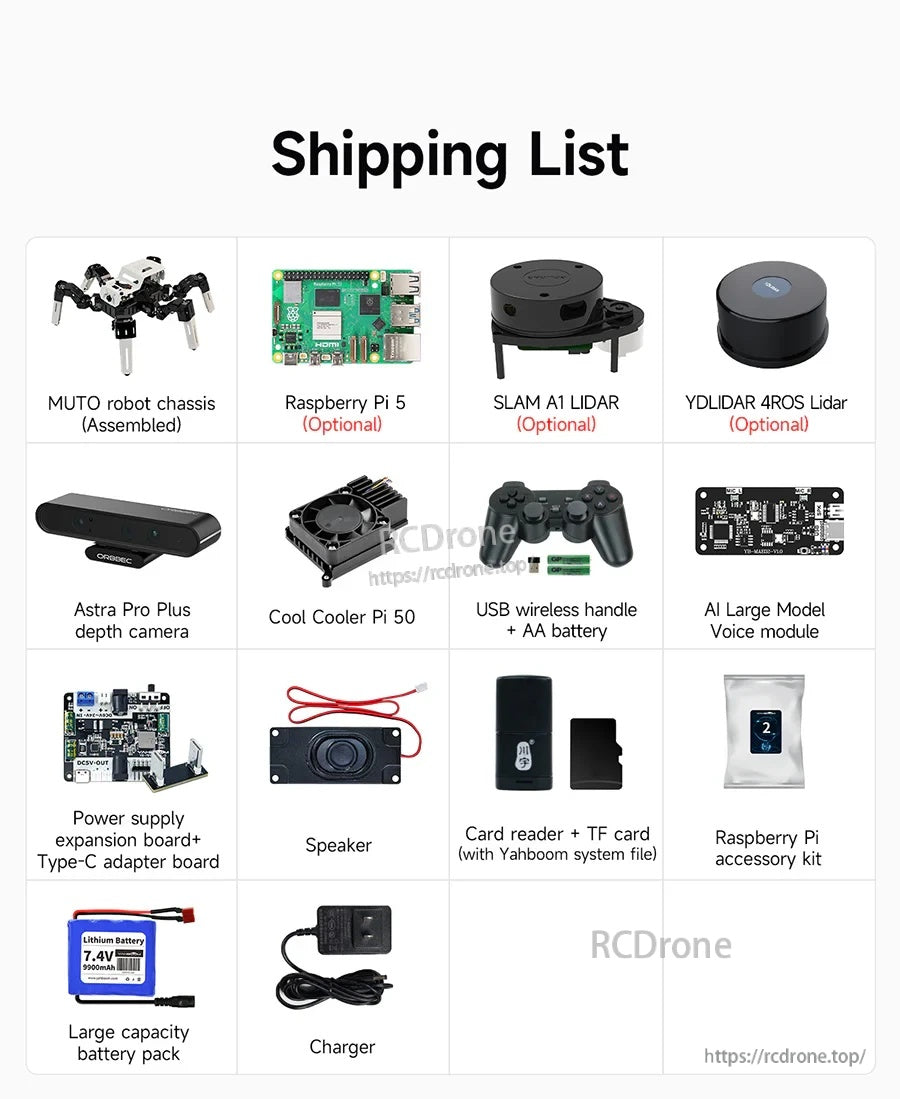
Lista pakietów zawiera zmontowane podwozie robota MUTO oraz opcjonalne dodatki, takie jak Raspberry Pi 5, SLAM Lidar i kamera głębi, a także akcesoria zasilające i audio.
Related Collections


















