















Yahboom ROSMASTER M3 Pro ROS2 Robot z OpenClaw AI Agent, podwójnym TOF LiDAR, ramieniem 6DOF, Mecanum SLAM
Yahboom ROSMASTER M3 Pro ROS2 Robot z OpenClaw AI Agent, podwójnym TOF LiDAR, ramieniem 6DOF, Mecanum SLAM
Yahboom
Nie można załadować gotowości do odbioru
Przegląd
ROSMASTER M3 Pro to platforma robota ROS2 firmy Yahboom przeznaczona do edukacji ROS, eksperymentów naukowych i nauczania zastosowań AI. Wykorzystuje podwozie z kołami Mecanum z zawieszeniem wahadłowym do ruchu we wszystkich kierunkach i jest rozwijana na ROS2 Humble. Platforma integruje 6DOF ramię robotyczne, dwuokularową kamerę głębi strukturalnego światła do integracji wzroku 3D ręka-oko oraz podwójne LiDAR TOF do mapowania SLAM we wszystkich kierunkach, autonomicznej nawigacji, unikania przeszkód i planowania ścieżki. Obsługuje również multimodalną interakcję z dużymi modelami AI (tekst/obraz/głos) z rozpoznawaniem mowy i zrozumieniem języka naturalnego do planowania i realizacji zadań.
Kluczowe cechy
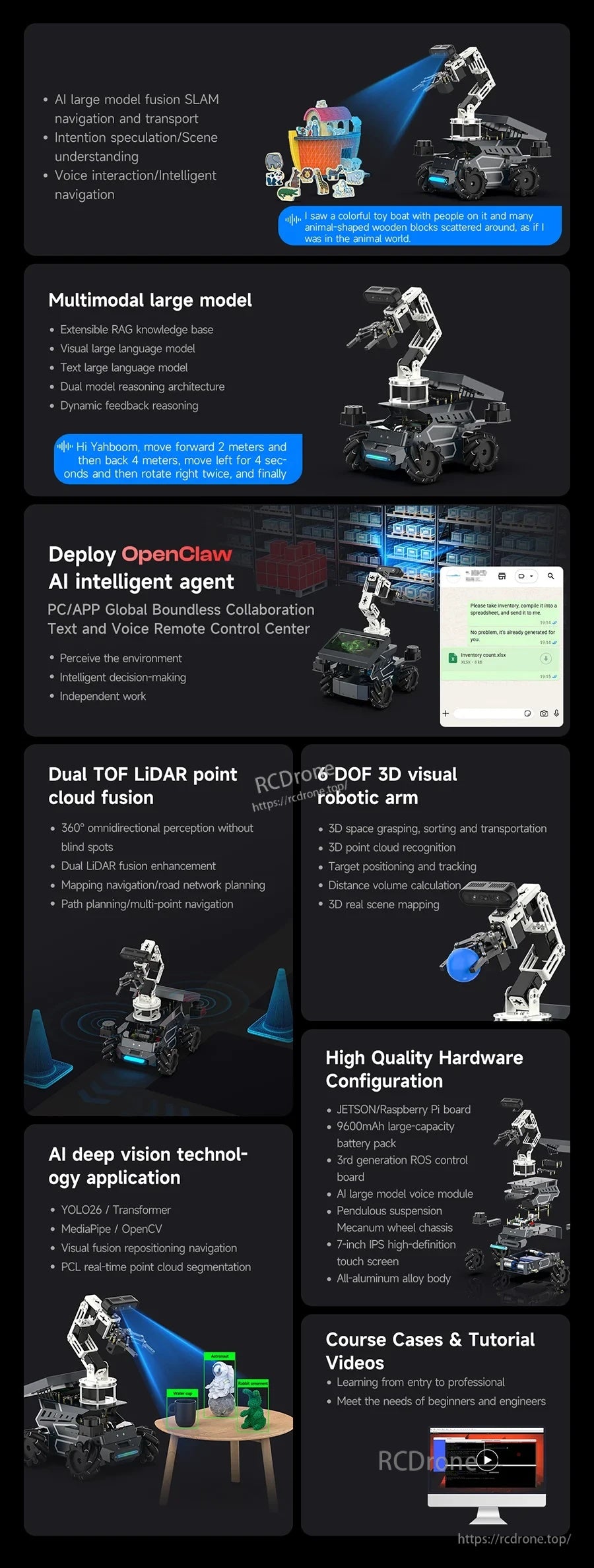
- Wdrożenie agenta AI OpenClaw (z samouczkiem wdrożenia i użytkowania). Uwaga: Wdrożenie OpenClaw nie jest obsługiwane w wersji Jetson Nano B01.
- Wbudowane możliwości dużego modelu multimodalnego: rozszerzalna baza wiedzy RAG, wizualny duży model językowy, tekstowy duży model językowy, architektura rozumowania z podwójnym modelem oraz dynamiczne rozumowanie zwrotne.
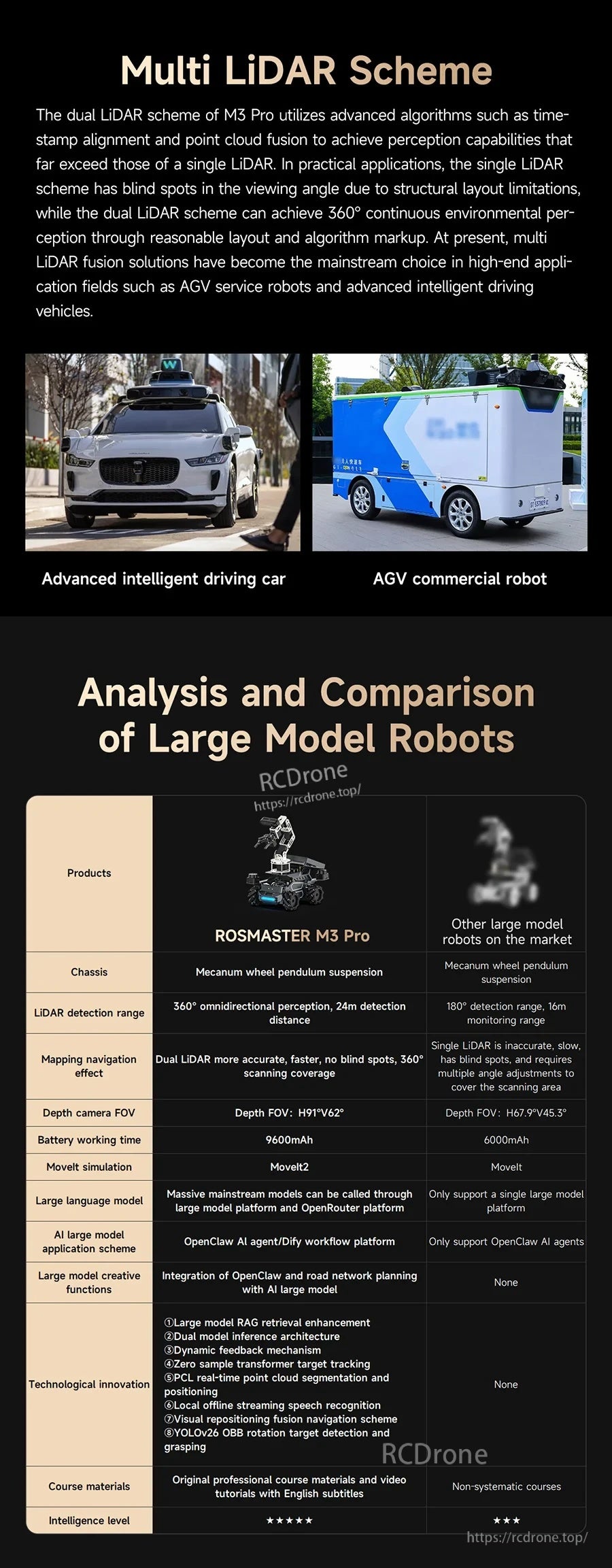
- Fuzja chmury punktów Dual TOF LiDAR: 360° wszechkierunkowa percepcja bez martwych punktów; mapowanie nawigacji/planowanie sieci drogowej; planowanie ścieżki i nawigacja wielopunktowa.
- Planowanie sieci drogowej: tworzenie, edytowanie i zarządzanie sieciami tras składającymi się z punktów i linii łączących; wspiera wybór najkrótszej ścieżki w sieciach tras w stylu sandbox.
- 6DOF 3D wizualne ramię robotyczne: chwytanie, sortowanie i transport w przestrzeni 3D; rozpoznawanie chmury punktów 3D; pozycjonowanie i śledzenie celów; obliczanie odległości/objętości; mapowanie rzeczywistej sceny 3D.
- Zastosowania technologii głębokiej wizji: YOLOv26 / Transformer, MediaPipe / OpenCV, wizualna fuzja nawigacji repozycjonującej, PCL segmentacja chmury punktów w czasie rzeczywistym.
- Wbudowany moduł głosowy dużego modelu AI i głośnik: obsługuje konwersję w czasie rzeczywistym między głosem a tekstem.
- Wsparcie symulacji MoveIt2.
Specyfikacje
| Model | ROSMASTER M3 Pro |
| System | ROS2 Humble |
| Podwozie | Korpus z całego stopu aluminium; zawieszenie wahadłowe z kołami Mecanum; struktura zawieszenia wahadłowego tylnego koła |
| Rozmiar kół | Koła Mecanum 80mm |
| LiDAR | Podwójny LiDAR TOF (układ z przesunięciem po przekątnej: prawy przód + lewy tył); skanowanie 360° |
| Wykrywanie LiDAR (z wykresu porównawczego) | 360° percepcja omnidirectionalna; zasięg wykrywania 24m |
| Kamera głębi | Binokularna kamera głębi z oświetleniem strukturalnym |
| FOV kamery głębi (z wykresu porównawczego) | H91° V62° |
| Ramię robotyczne | 6DOF ramię robotyczne; 6PCS inteligentne serwomechanizmy szeregowe (obsługują odczyt pozycji/statusu i innych informacji) |
| Zdolność chwytaka (z opisu ramienia) | Chwyta do 410g; powtarzalna dokładność pozycjonowania 0.5mm |
| Bateria | Pakiet baterii o dużej pojemności 9600mAh |
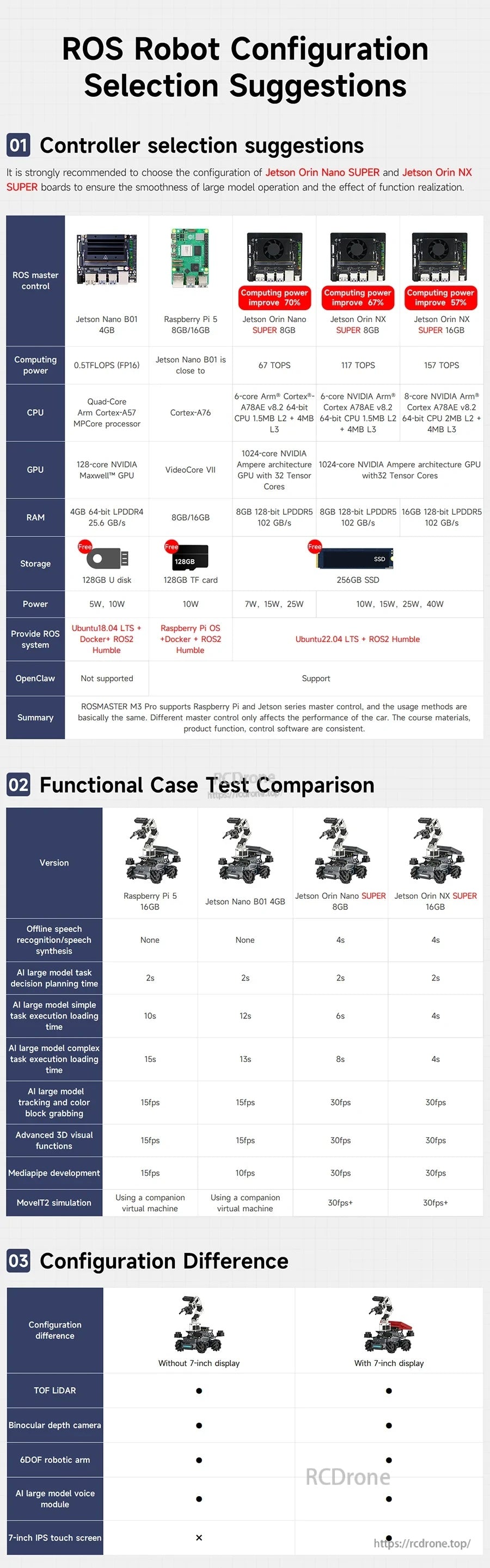
| Ekran dotykowy | 7-calowy ekran dotykowy IPS o wysokiej rozdzielczości (opcjonalnie); warianty konfiguracji pokazane: z wyświetlaczem / bez wyświetlacza |
| Silniki | Metalowy silnik z enkoderem o wysokim momencie obrotowym; niezależne zawieszenie wahadłowe z silnikiem o wysokim momencie obrotowym |
| Płyta sterująca ROS | 3. generacja płyty sterującej ROS |
| MoveIt | MoveIt2 |
| Schematy zastosowań dużych modeli AI | Agent AI OpenClaw; opcjonalna platforma workflow Dify |
| Agent AI OpenClaw – obsługiwane sterowanie główne | Raspberry Pi 5; Jetson Orin Nano SUPER; Jetson Orin NX SUPER |
| Agent AI OpenClaw – metody interakcji | Głos, WAP, polecenia tekstowe web/terminal |
| OpenClaw AI agent – tryb sterowania robotem | MCP, CLI |
| Platforma przepływu pracy Dify – obsługiwane sterowanie główne | Raspberry Pi 5; Jetson Orin Nano SUPER; Jetson Orin NX SUPER; Jetson Nano B01 |
| Platforma przepływu pracy Dify – tryb sterowania robotem | http |
| Algorytm śledzenia wizualnego AI (z porównania rozwiązań) | OpenClaw: model Transformer; Dify: KCF |
| Opcjonalny scenariusz AI z dużym modelem – mapa piaskownicy / stół piaskowy | Rozmiar: 3m × 4.1m (opcjonalne akcesorium; nie jest dołączone do ROSMASTER M3 Pro) |
Opcje Płyty Głównej (do wyboru)
| Opcja | Kluczowe specyfikacje obliczeniowe pokazane | Moc (pokazana) | System ROS (pokazany) | OpenClaw (pokazany) |
| Jetson Nano B01 4GB | 0.5 TFLOPS (FP16); Czterordzeniowy Arm Cortex-A57 MPCore; 128-rdzeniowy NVIDIA Maxwell GPU; 4GB 64-bit LPDDR4 (25.6 GB/s) | 5W, 10W | Ubuntu 18.04 LTS + Docker + ROS2 Humble | Nieobsługiwane |
| Raspberry Pi 5 (8GB/16GB) | Cortex-A76; VideoCore VII; RAM: 8GB/16GB | 10W | Raspberry Pi OS + Docker + ROS2 Humble | (Zobacz notatkę o wsparciu OpenClaw powyżej) |
| Jetson Orin Nano SUPER 8GB | 67 TOPS; 6-rdzeniowy Arm Cortex-A78AE v8.2 64-bit CPU (1.5MB L2 + 4MB L3); 1024-rdzeniowy NVIDIA Ampere GPU z 32 rdzeniami Tensor; 8GB 128-bit LPDDR5 (102 GB/s) | 7W, 15W, 25W | Ubuntu 22.04 LTS + ROS2 Humble | Wsparcie |
| Jetson Orin NX SUPER 8GB | 117 TOPS; 6-rdzeniowy NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU (1.5MB L2 + 4MB L3); 1024-rdzeniowy NVIDIA Ampere GPU z 32 rdzeniami Tensor; 8GB 128-bit LPDDR5 (102 GB/s) | 10W, 15W, 25W, 40W | Ubuntu 22.04 LTS + ROS2 Humble | Wsparcie |
| Jetson Orin NX SUPER 16GB | 157 TOPS; 8-rdzeniowy NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU (2MB L2 + 4MB L3); 1024-rdzeniowy NVIDIA Ampere GPU z 32 rdzeniami Tensor; 16GB 128-bit LPDDR5 (102 GB/s) | 10W, 15W, 25W, 40W | Ubuntu 22.04 LTS + ROS2 Humble | Wsparcie |
Porównanie testu funkcjonalnego (pokazane)
| Wersja | Offline rozpoznawanie mowy / synteza mowy | Czas planowania decyzji zadania dużego modelu AI | Czas ładowania prostego zadania | Czas ładowania złożonego zadania | Śledzenie & chwytania bloku kolorowego | Zaawansowane funkcje wizualne 3D | Rozwój MediaPipe | Symulacja MoveIt2 |
| Raspberry Pi 5 16GB | Brak | 2s | 10s | 15s | 15fps | 15fps | 15fps | Używanie wirtualnej maszyny towarzyszącej |
| Jetson Nano B01 4GB | Brak | 2s | 12s | 13s | 15fps | 15fps | 10fps | Używanie wirtualnej maszyny towarzyszącej |
| Jetson Orin Nano SUPER 8GB | 4s | 2s | 6s | 8s | 30fps | 30fps | 30fps | 30fps+ |
| Jetson Orin NX SUPER 16GB | 4s | 2s | 4s | 4s | 30fps | 30fps | 30fps | 30fps+ |
W celu uzyskania pomocy przy wyborze konfiguracji (opcje Raspberry Pi vs Jetson) lub wsparcia posprzedażowego, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected].
Zastosowania
- Edukacja i laboratoria ROS2: mapowanie SLAM, nawigacja, unikanie przeszkód i planowanie sieci drogowej.
- Manipulacja wizją 3D &: rozpoznawanie/chwytanie 3D, sortowanie, śledzenie i obsługa z ramieniem 6DOF i chmurą punktów głębokości.
- Interakcja AI multimodalna: interakcja głos/tekst/obraz z dekompozycją zadań, długoterminowym harmonogramowaniem, wyszukiwaniem w pamięci i logiką proaktywnej odpowiedzi (workflow OpenClaw).
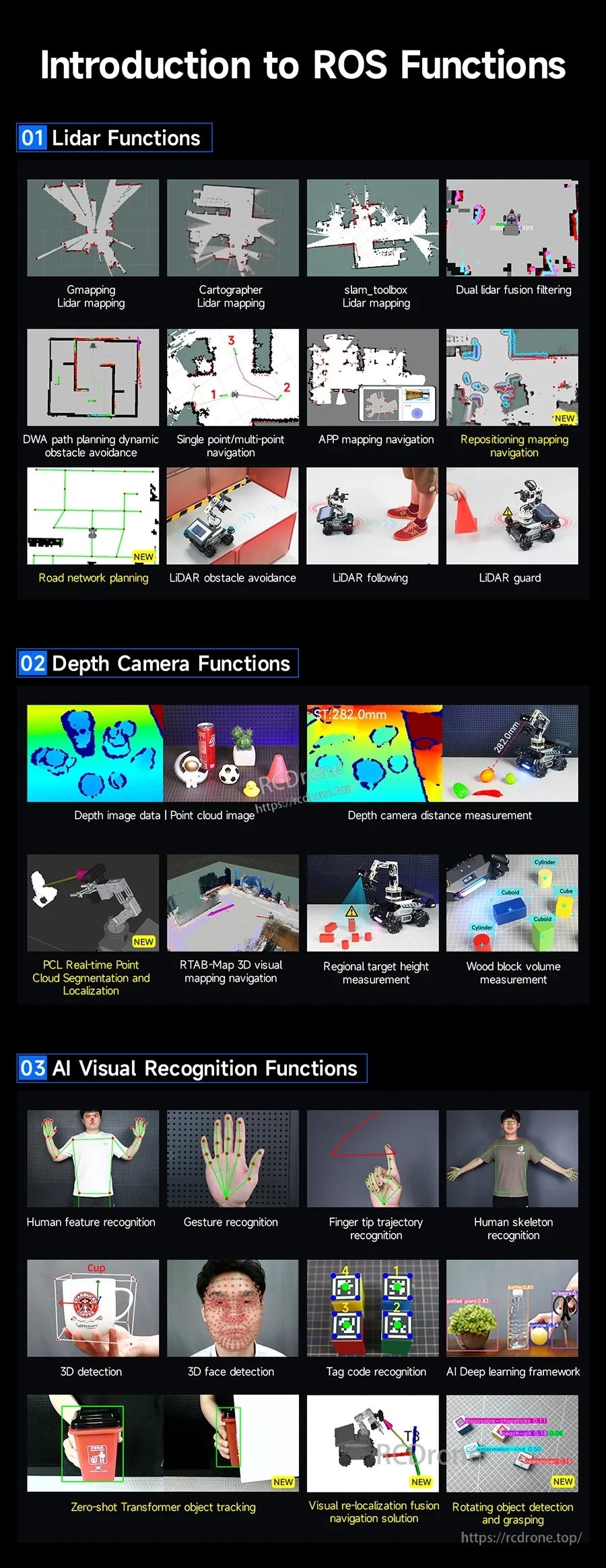
- Wizualne rozpoznawanie AI (pokazane przykłady): rozpoznawanie cech ludzkich, rozpoznawanie gestów, rozpoznawanie trajektorii końcówek palców, rozpoznawanie szkieletu ludzkiego, detekcja 3D, detekcja twarzy 3D, rozpoznawanie kodów tagów, śledzenie obiektów Transformer bez próbek, rozwiązanie nawigacyjne z fuzją relokalizacji wizualnej, detekcja i chwytanie obiektów obrotowych.
- Funkcje kamery głębi (przykłady pokazane): obraz głębi/chmura punktów, pomiar odległości, segmentacja i lokalizacja chmury punktów w czasie rzeczywistym PCL, nawigacja wizualna 3D RTAB-Map, pomiar wysokości celu regionalnego, pomiar objętości klocka drewnianego.
- Funkcje LiDAR (przykłady pokazane): mapowanie Gmapping/Cartographer/slam_toolbox, filtrowanie fuzji podwójnego LiDAR, dynamiczne unikanie przeszkód DWA, nawigacja punktowa/jednopunktowa, mapowanie nawigacji aplikacji, mapowanie nawigacji repozycjonowania, planowanie sieci drogowej, unikanie przeszkód LiDAR, śledzenie LiDAR, ochrona LiDAR.
Instrukcje
- Strona z samouczkami/nauką: https://www.yahboom.net/study/ROSMASTER-M3PRO
Szczegóły

Wszechstronna platforma edukacyjna ROS2 Humble łącząca mobilność omnidirectionalną, wizję 3D i ramię robotyczne 6DOF.
Funkcje interakcji multimodalnej i autonomii wspierają mapowanie, nawigację, chwytanie i wykonywanie zadań na jednej platformie.
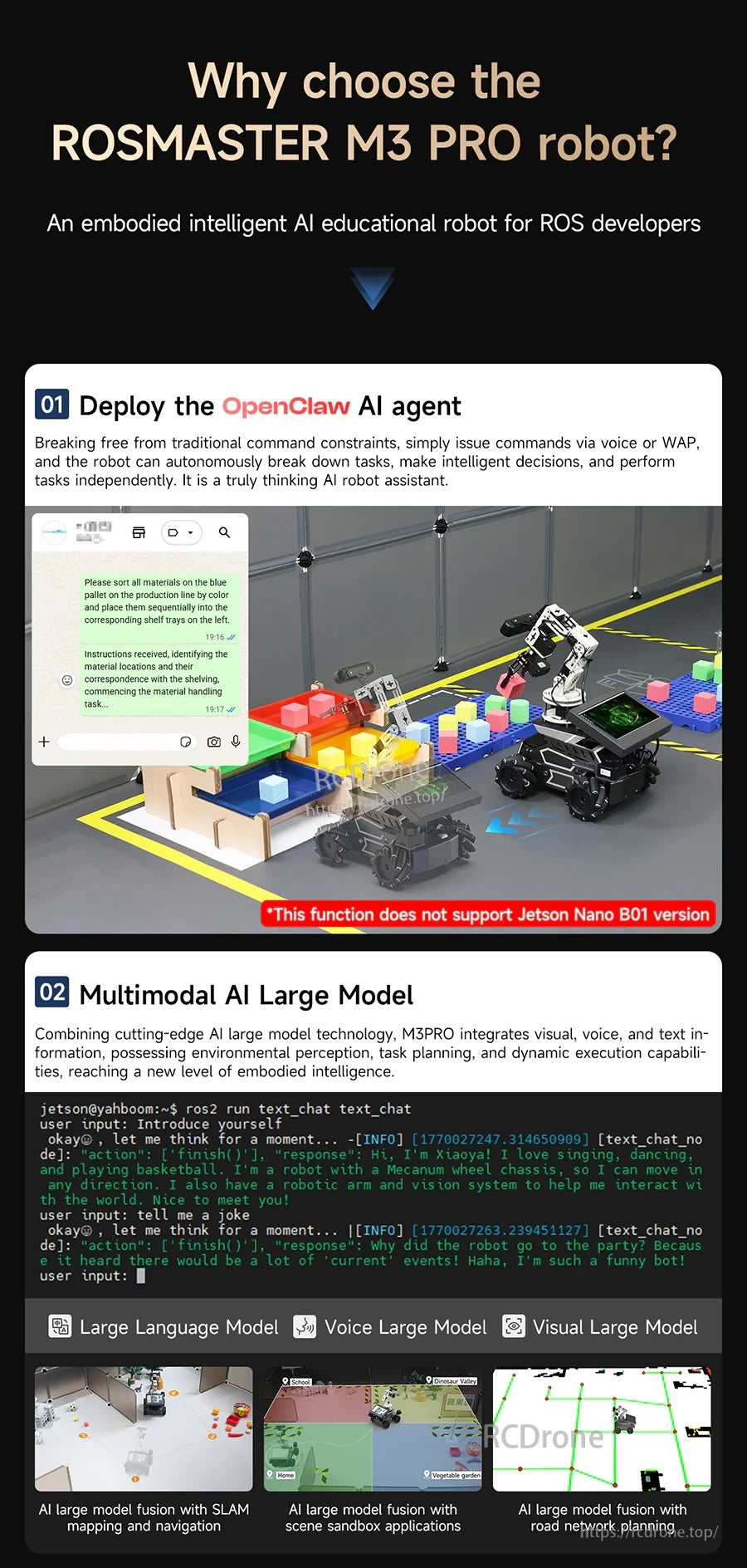
OpenClaw umożliwia planowanie zadań w języku naturalnym z opcjami dla poleceń głosowych, aplikacji i tekstowych.
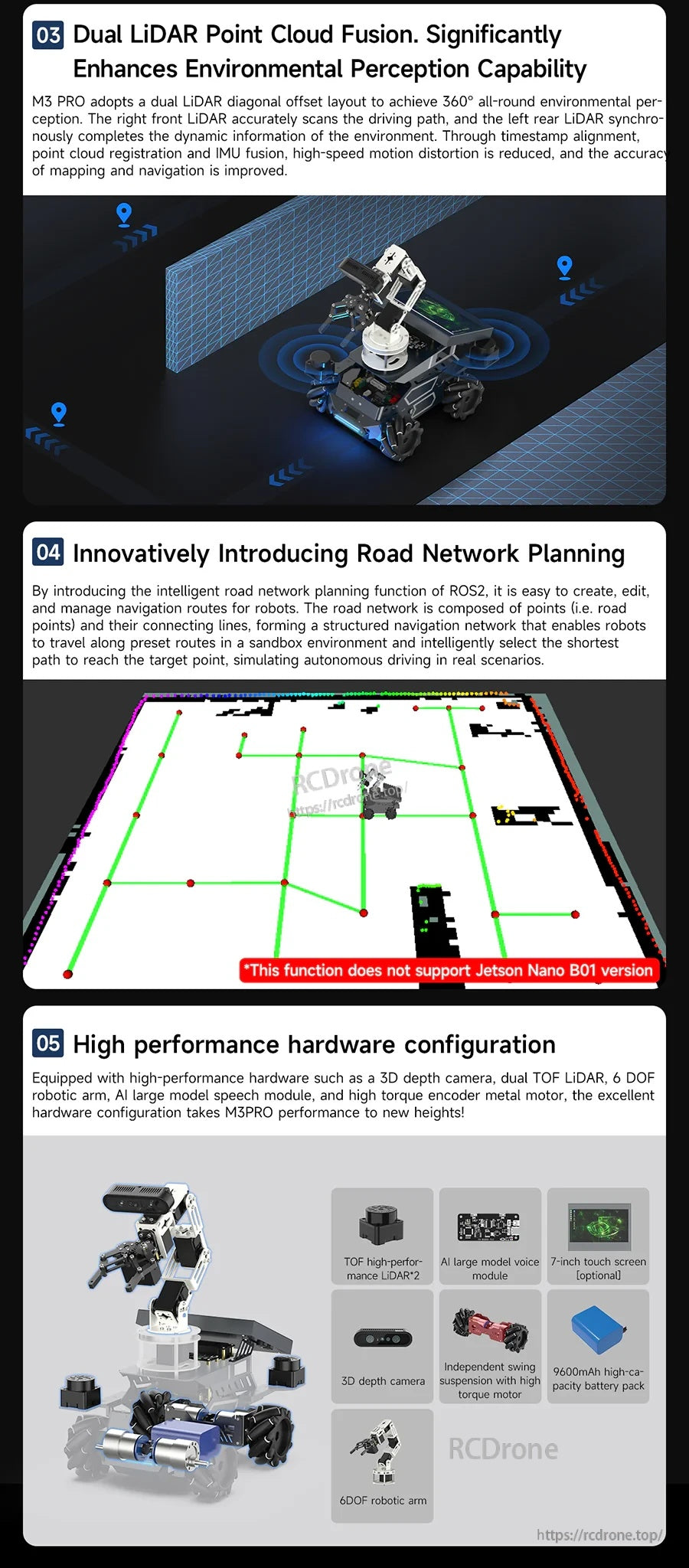
Podwójna fuzja TOF LiDAR zapewnia percepcję 360° dla mapowania SLAM, unikania przeszkód i elastycznego planowania trasy.
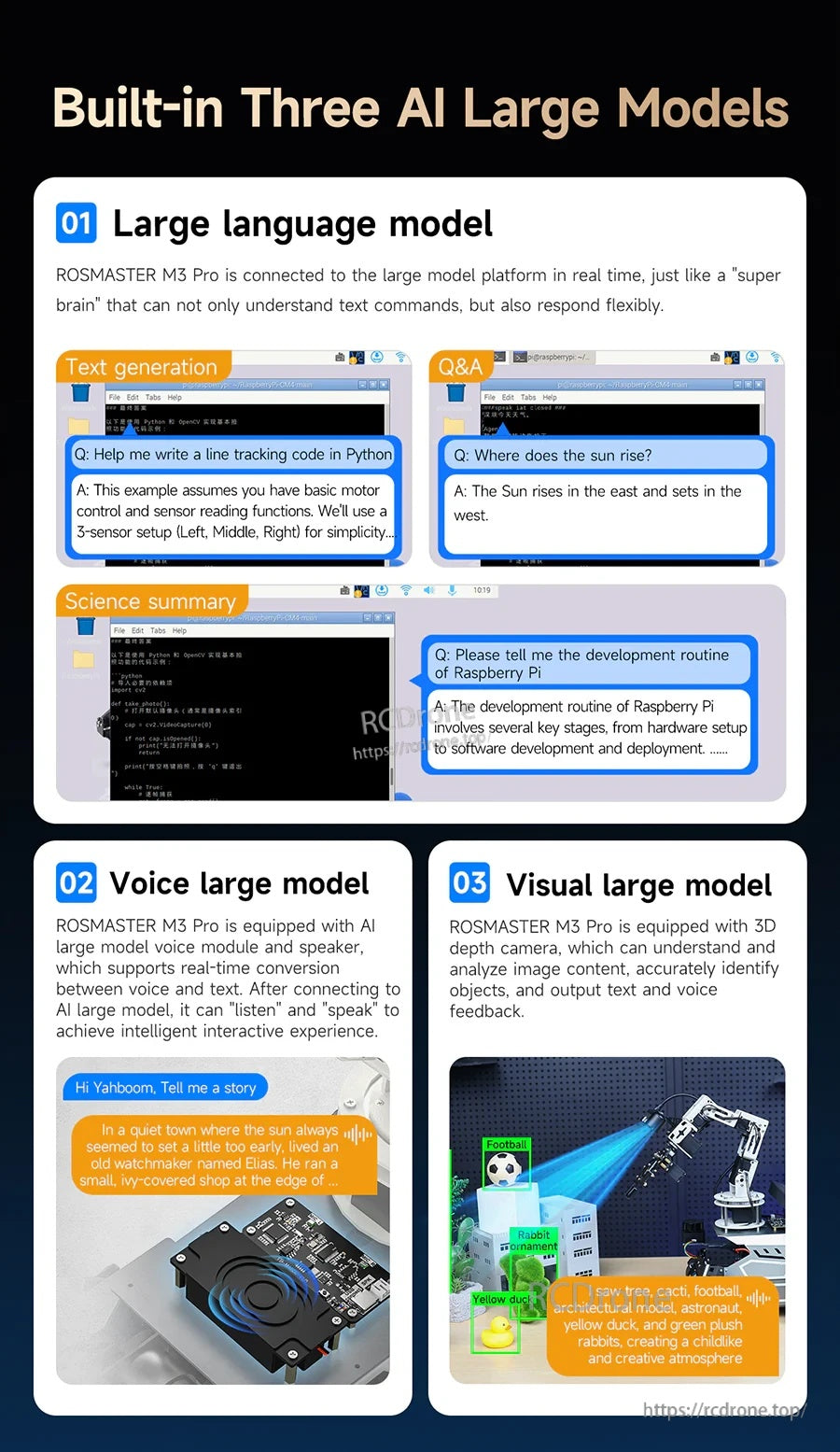
Trzy wbudowane typy modeli obejmują rozumowanie tekstowe, interakcję głosową i zrozumienie wizualne dla bogatszych demonstracji robotyki.

Wybierz między wbudowanym wdrożeniem OpenClaw a opcjonalną platformą przepływu pracy w zależności od potrzeb projektu.
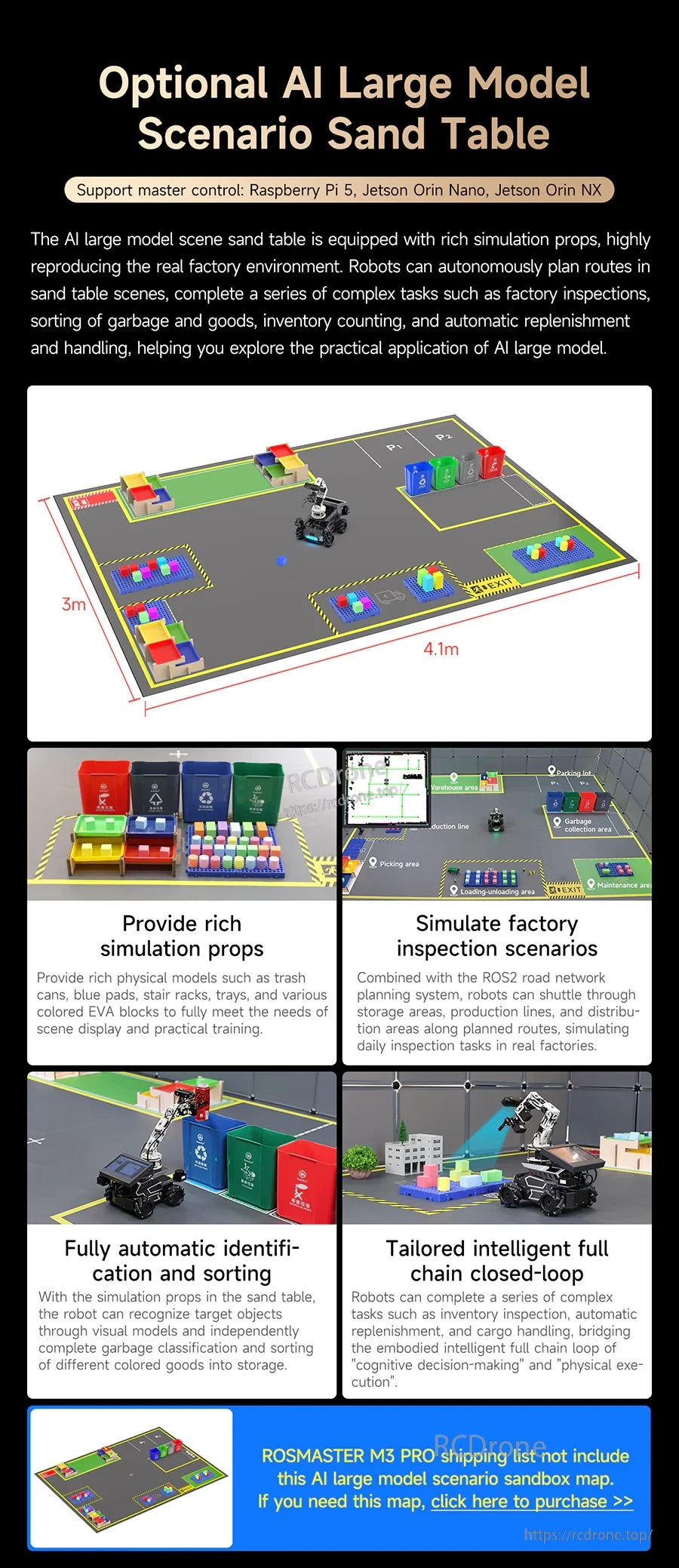
Modułowy stół scenariuszy wspiera powtarzalne sceny treningowe do sortowania, liczenia i ćwiczeń nawigacyjnych.
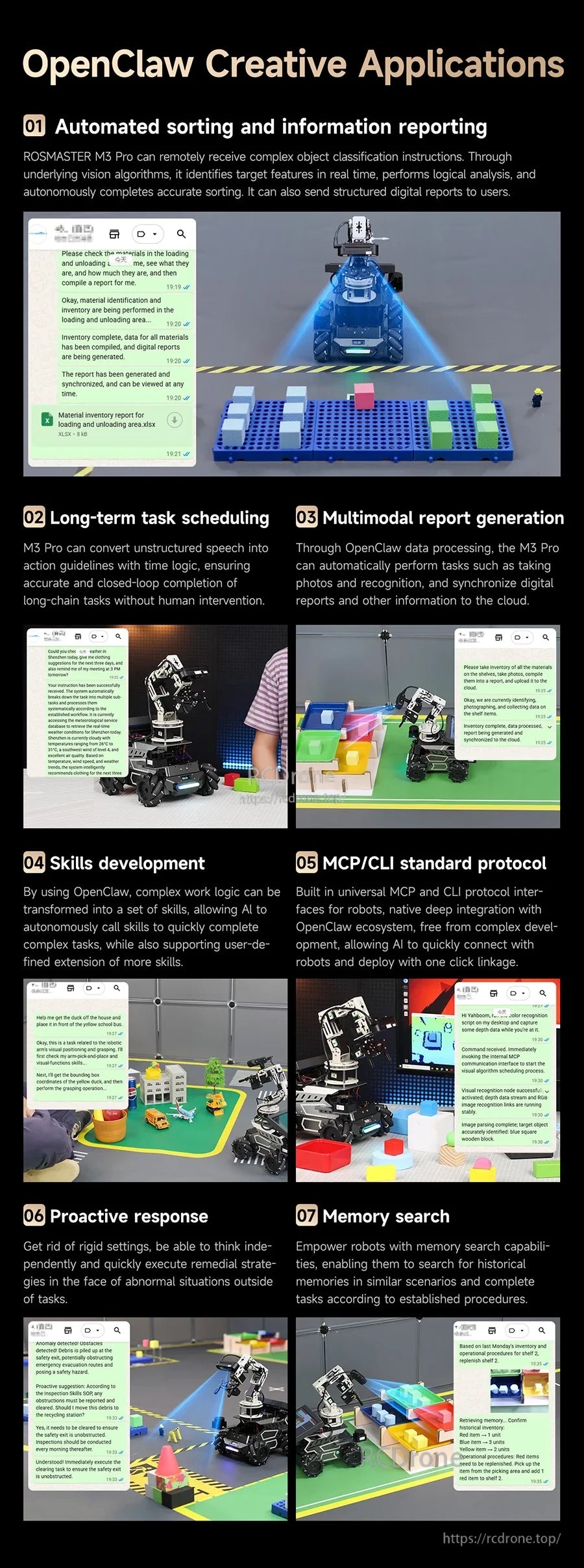
Przykładowe projekty pokazują, jak sterowanie oparte na agentach może być stosowane do codziennych zadań laboratoryjnych i interaktywnych demonstracji.
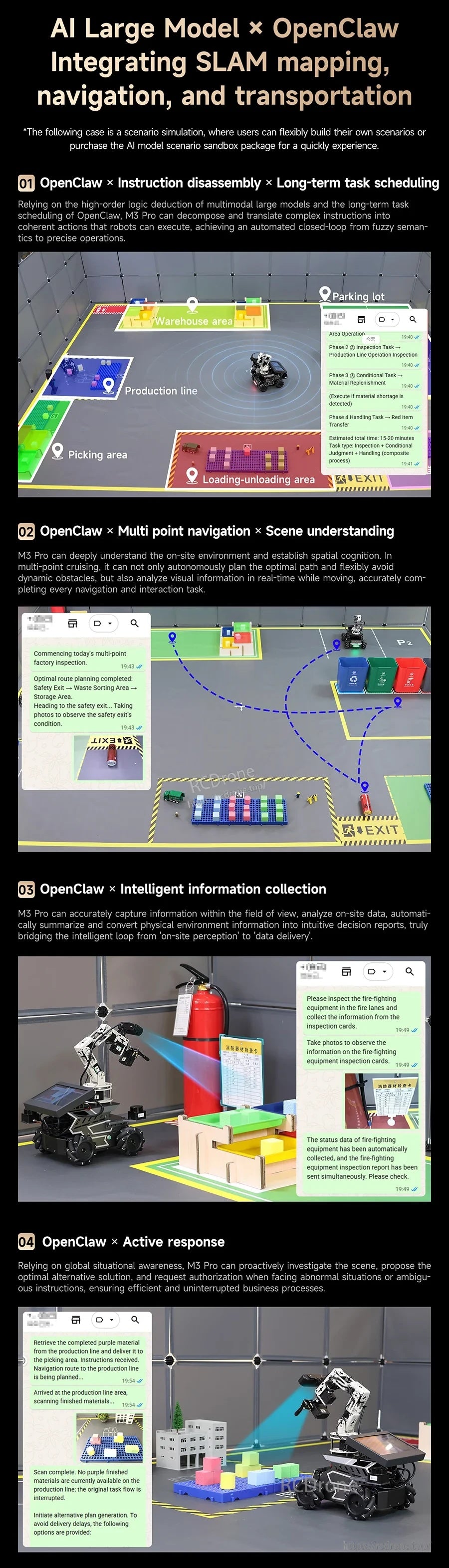
Przepływy pracy agentów mogą łączyć instrukcje oparte na czacie z mapowaniem, nawigacją i zachowaniami transportowymi.
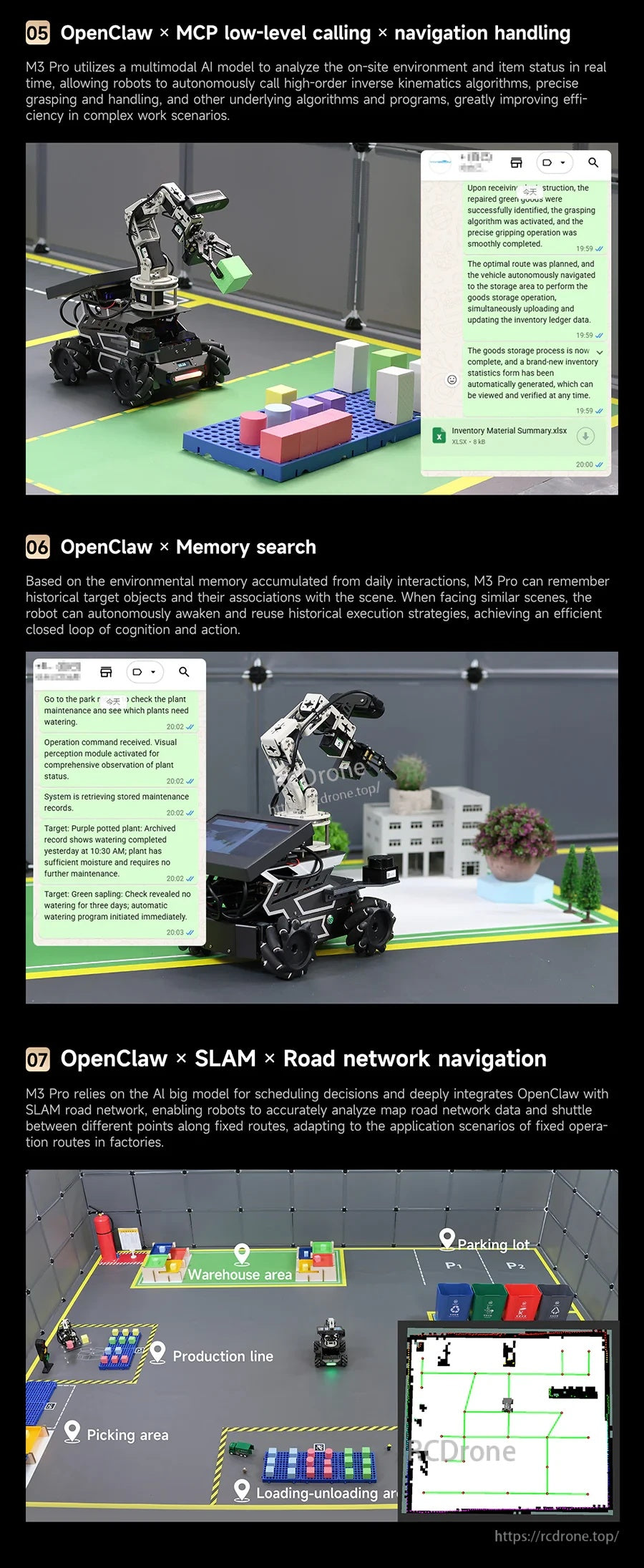
Narzędzia takie jak wyszukiwanie pamięci i wywołania w stylu MCP pomagają połączyć wyższe intencje z niezawodnymi działaniami robotów.
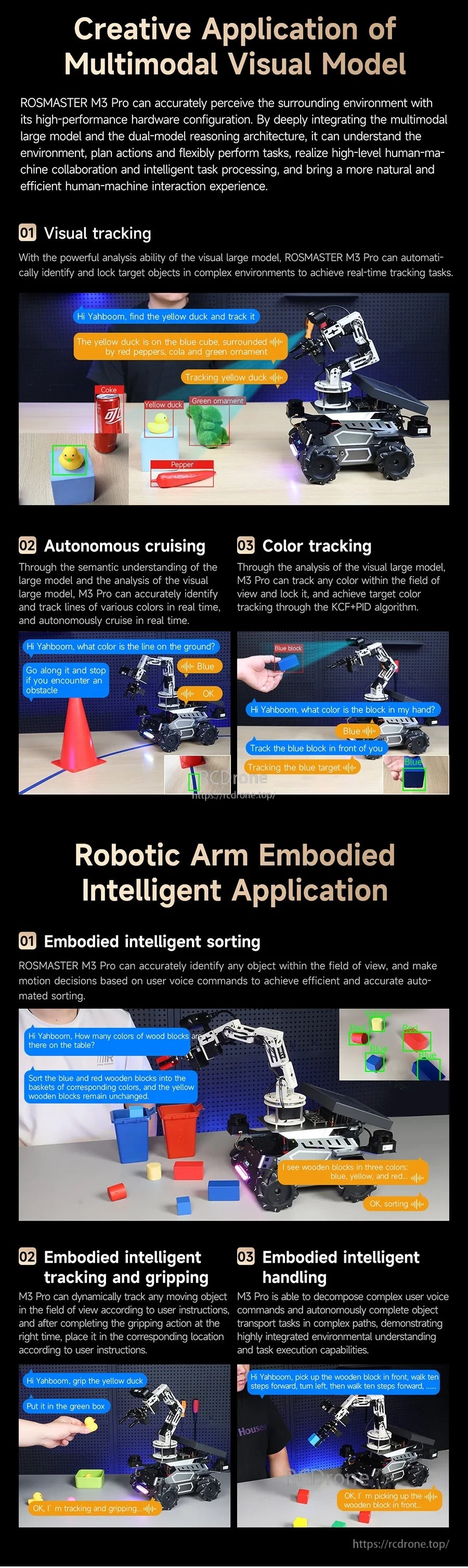
Zachowania oparte na wizji obejmują śledzenie celów, rozpoznawanie kolorów, autonomiczne poruszanie się i skoordynowane działania ramion.
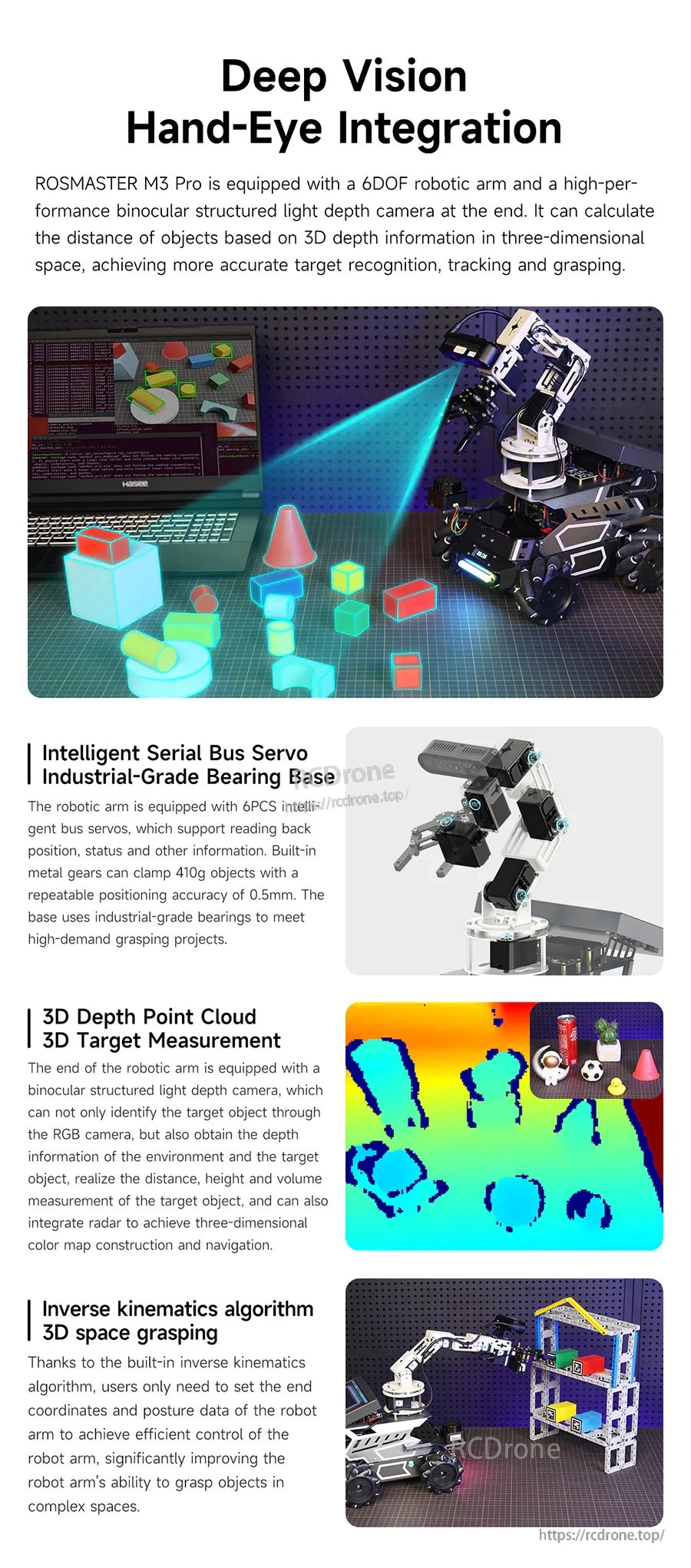
Binokularne czujniki głębi oparte na świetle strukturalnym wspierają koordynację ręka-oko dla pomiarów 3D, rozpoznawania i chwytania.
Porównania konfiguracji pomagają wybrać odpowiednie połączenie czujników i obliczeń dla twojej klasy lub laboratorium.
Przewodnik po wyborze podsumowuje wspólne konfiguracje i różnice w zestawach funkcji.
Podstawowe możliwości ROS obejmują mapowanie LiDAR, percepcję z kamerą głębi i potoki rozpoznawania wizualnego.
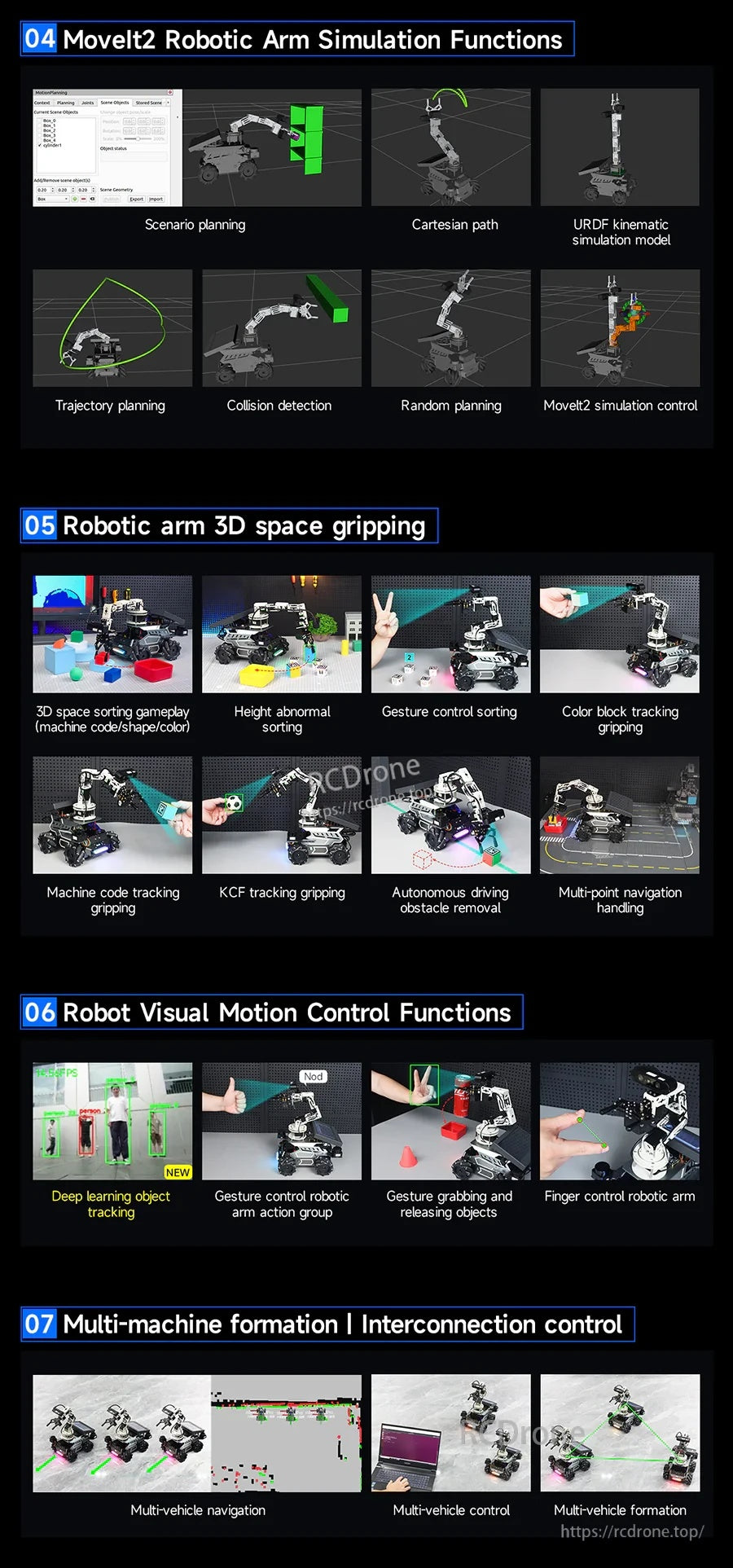
Symulacja MoveIt2 i demonstracje kontroli ruchu wspierają planowanie, przepływy pracy chwytania i koordynację wielu robotów.
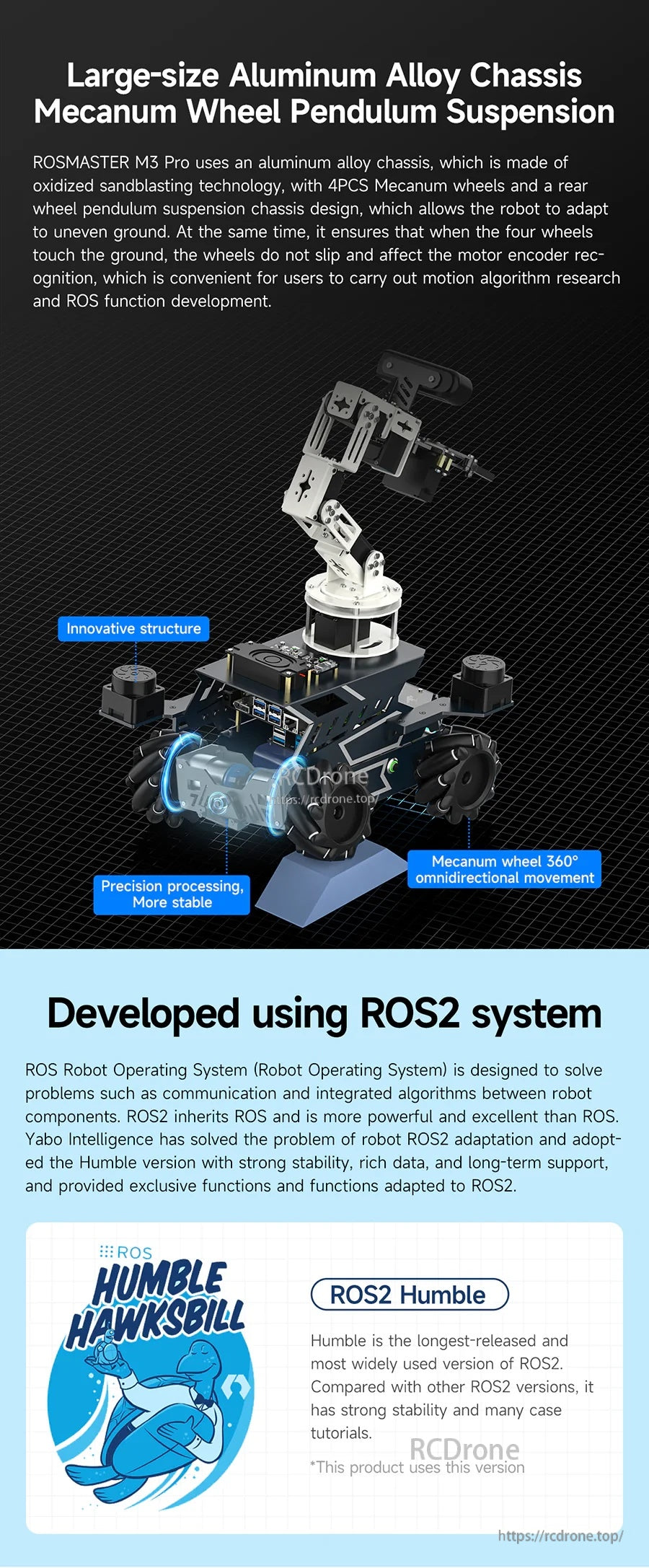
Aluminiowe podwozie mecanum z zawieszeniem wahadłowym poprawia stabilność, zachowując pełną kompatybilność z ROS2 Humble.

Wiele metod sterowania i przejrzysty układ struktury ułatwiają konfigurację, konserwację i rozbudowę robota.
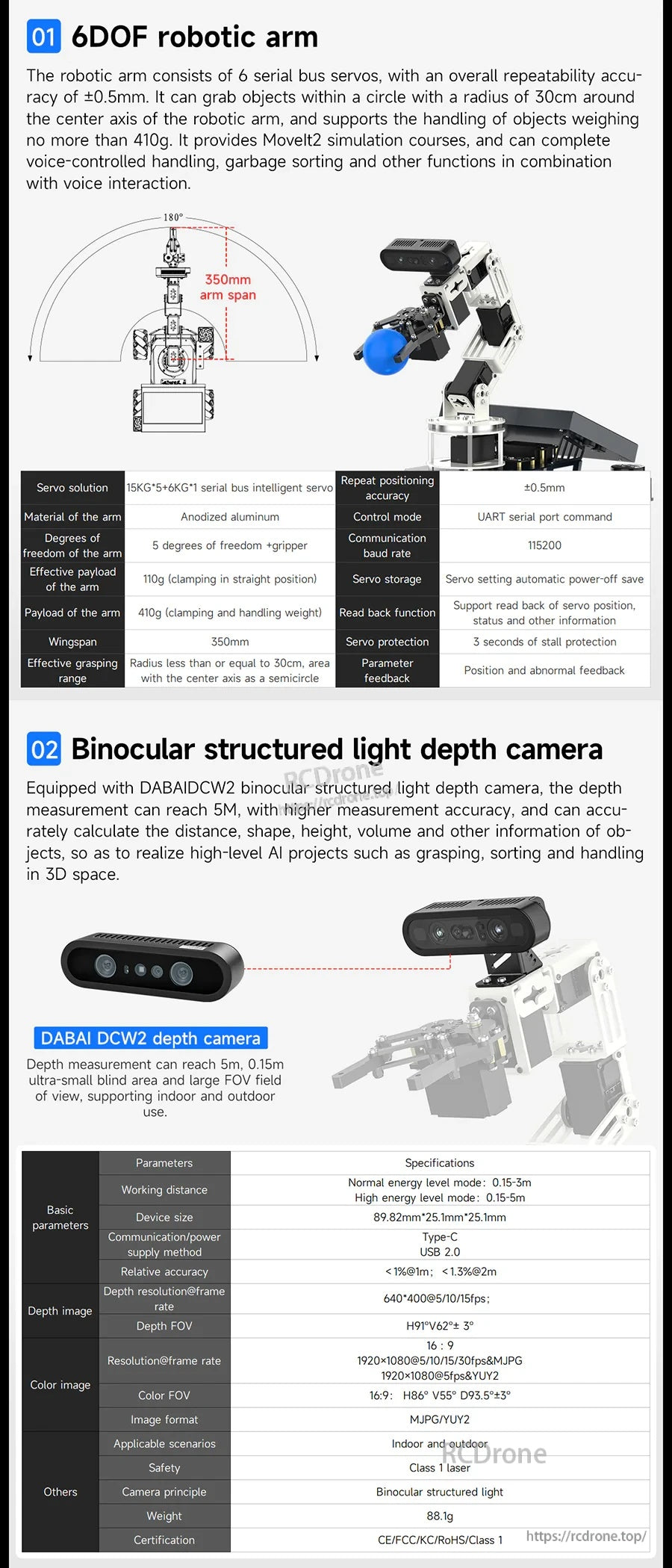
Platforma ROSMASTER M3 Pro może być skonfigurowana z 6DOF ramieniem robotycznym i binokularną kamerą strukturalną do zadań chwytania i percepcji głębi.
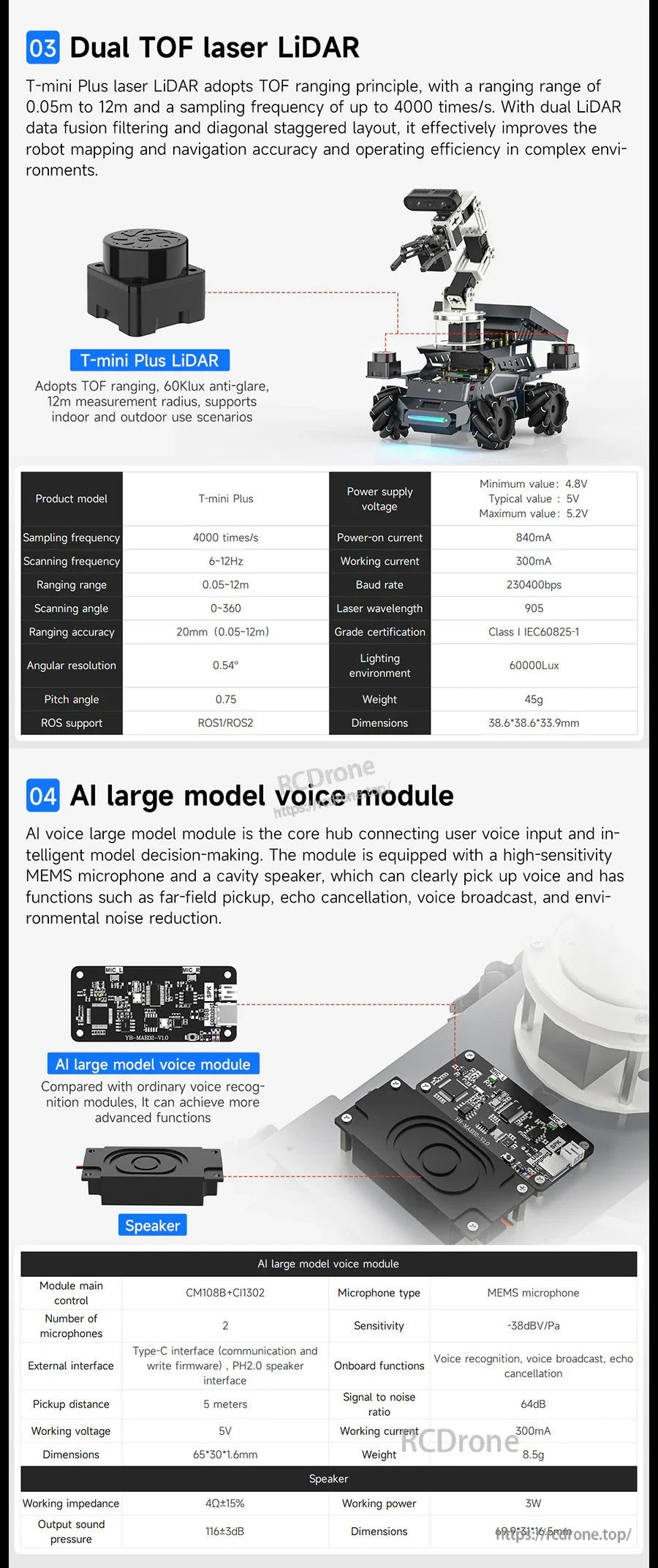
TOF laser LiDAR obsługuje zasięg 0,05–12 m z prędkością do 4000 skanów na sekundę, a moduł głosowy dodaje połączenia mikrofonu i głośnika do interakcji głosowej.
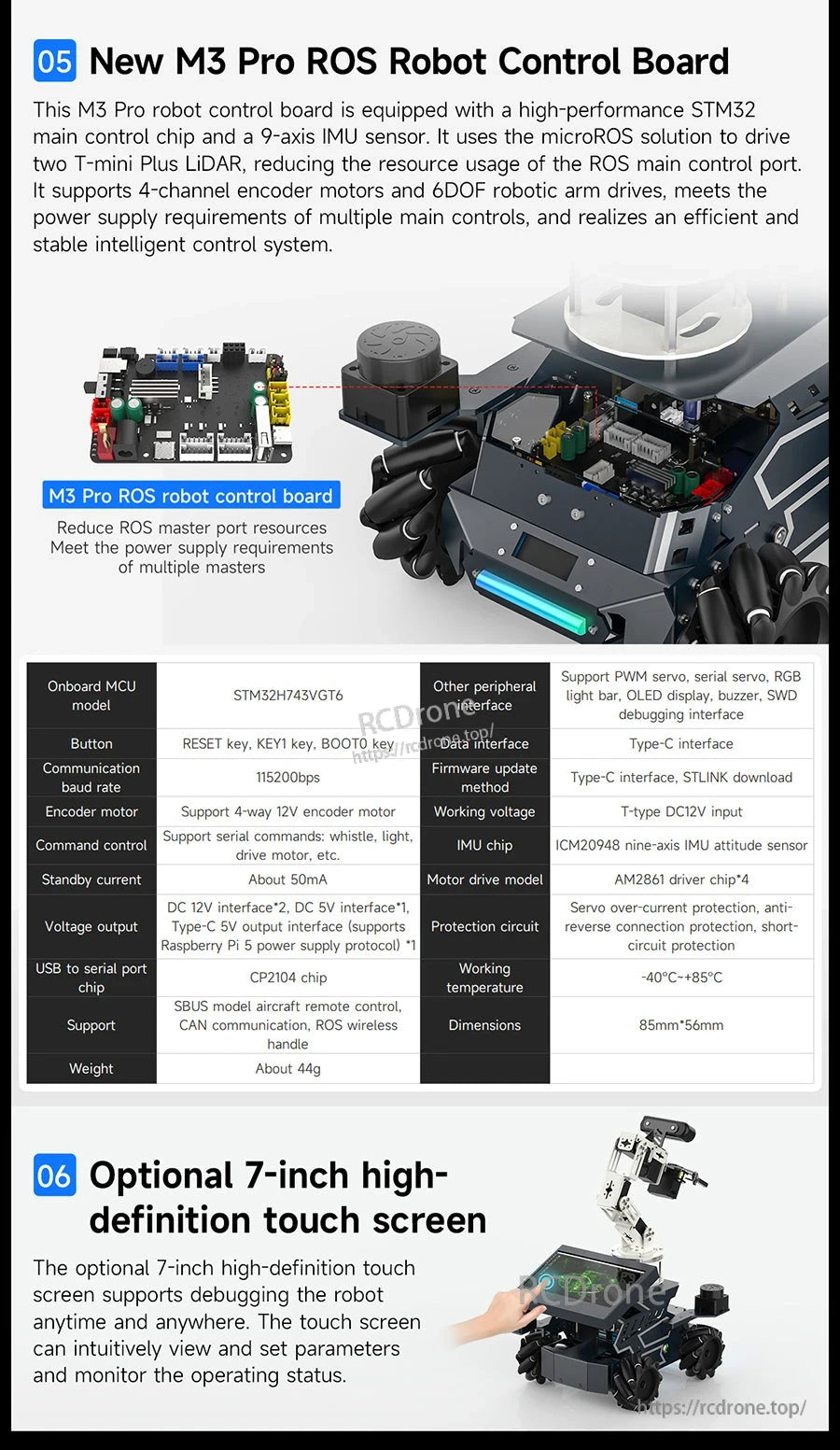
Płyta sterująca robota Yahboom ROSMASTER M3 Pro ROS2 zapewnia kompaktowy, oznaczony układ złączy do budowy i rozbudowy systemu mobilnego robota.
Yahboom ROSMASTER M3 Pro obejmuje dostęp do ponad 200 szczegółowych kursów za pośrednictwem internetowego repozytorium samouczków do nauki ROS2 i AI.
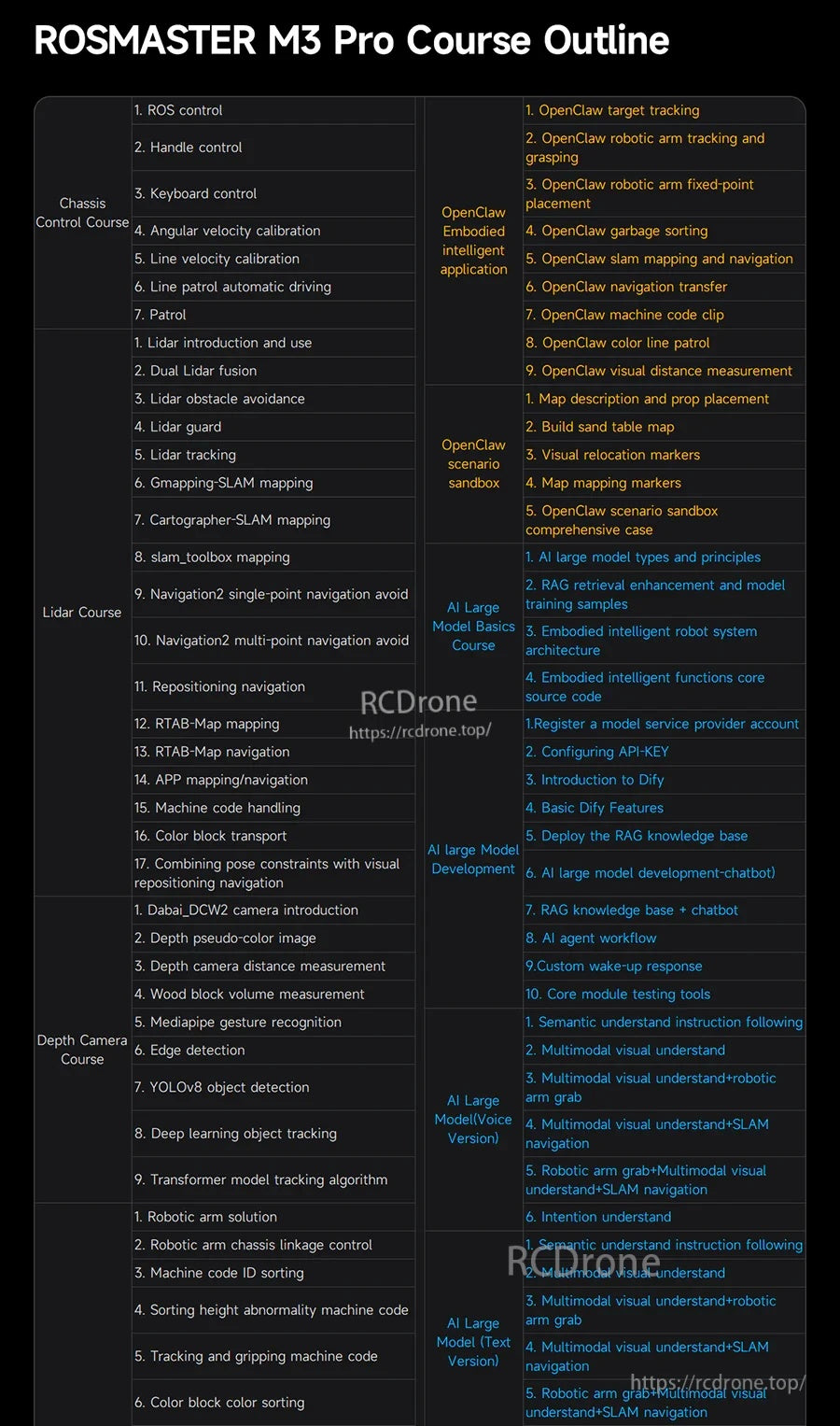
Plan nauki ROSMASTER M3 Pro obejmuje podstawy sterowania ROS wraz z zadaniami wizji OpenCV, mapowaniem SLAM i funkcjami AI dla progresywnej praktyki ROS2.
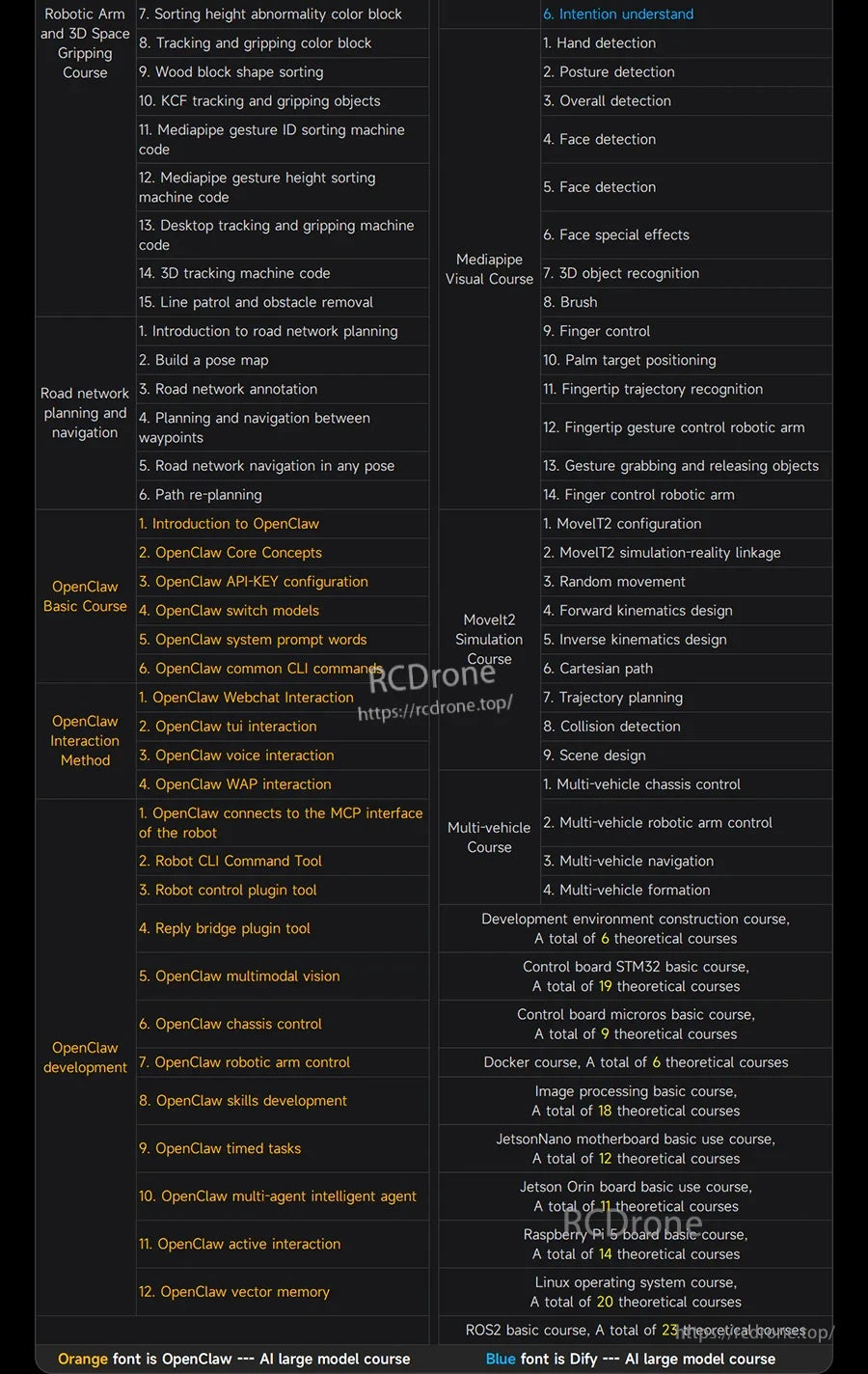
Plan nauki ROSMASTER M3 Pro obejmuje tematy takie jak wizja OpenCV, śledzenie MediaPipe, symulacja MoveIt2 i podstawy ROS2.
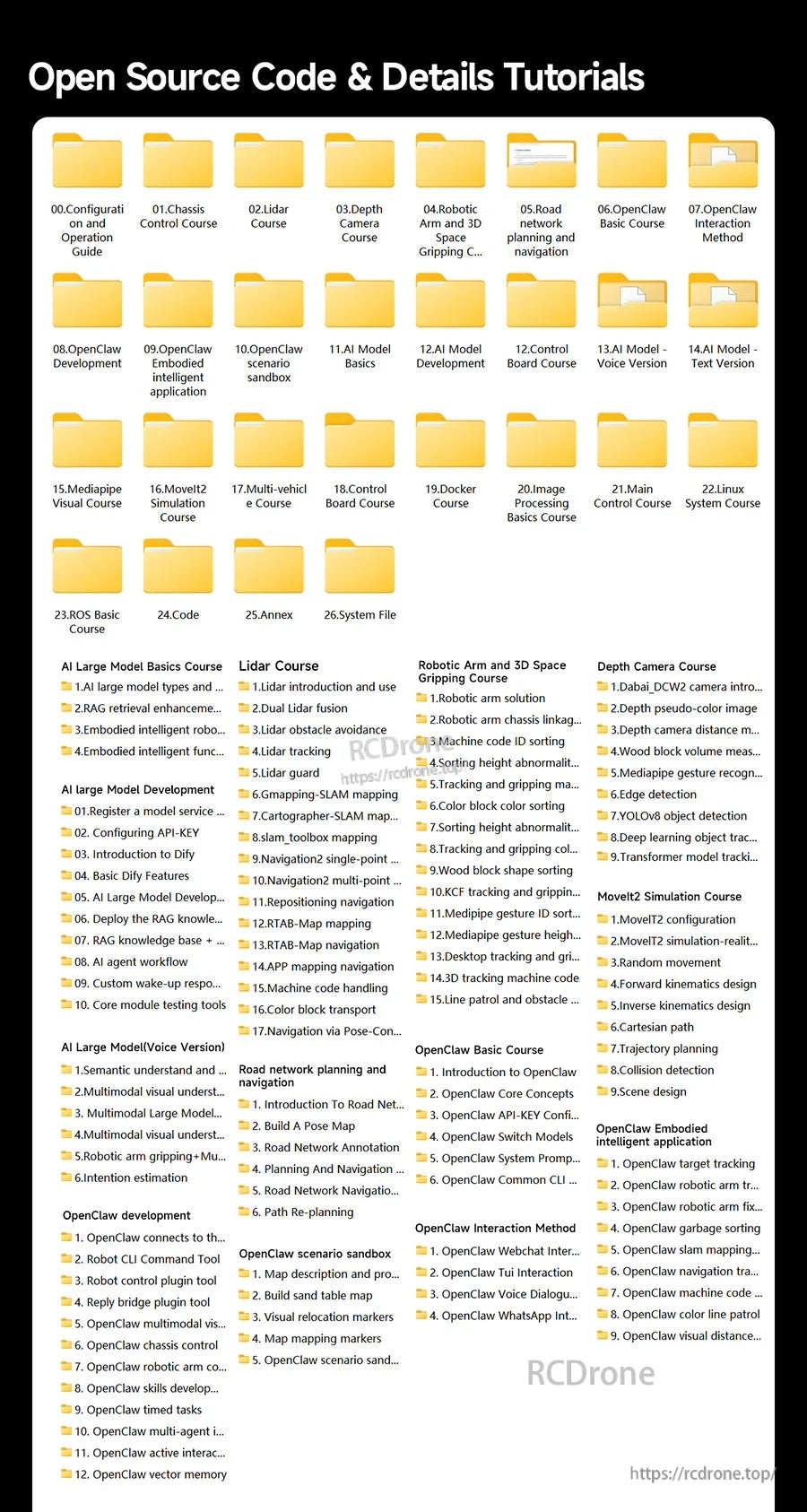
ROSMASTER M3 Pro zawiera foldery z kodem open-source i szczegółowe samouczki obejmujące podstawy ROS, mapowanie, nawigację i zadania wizji.
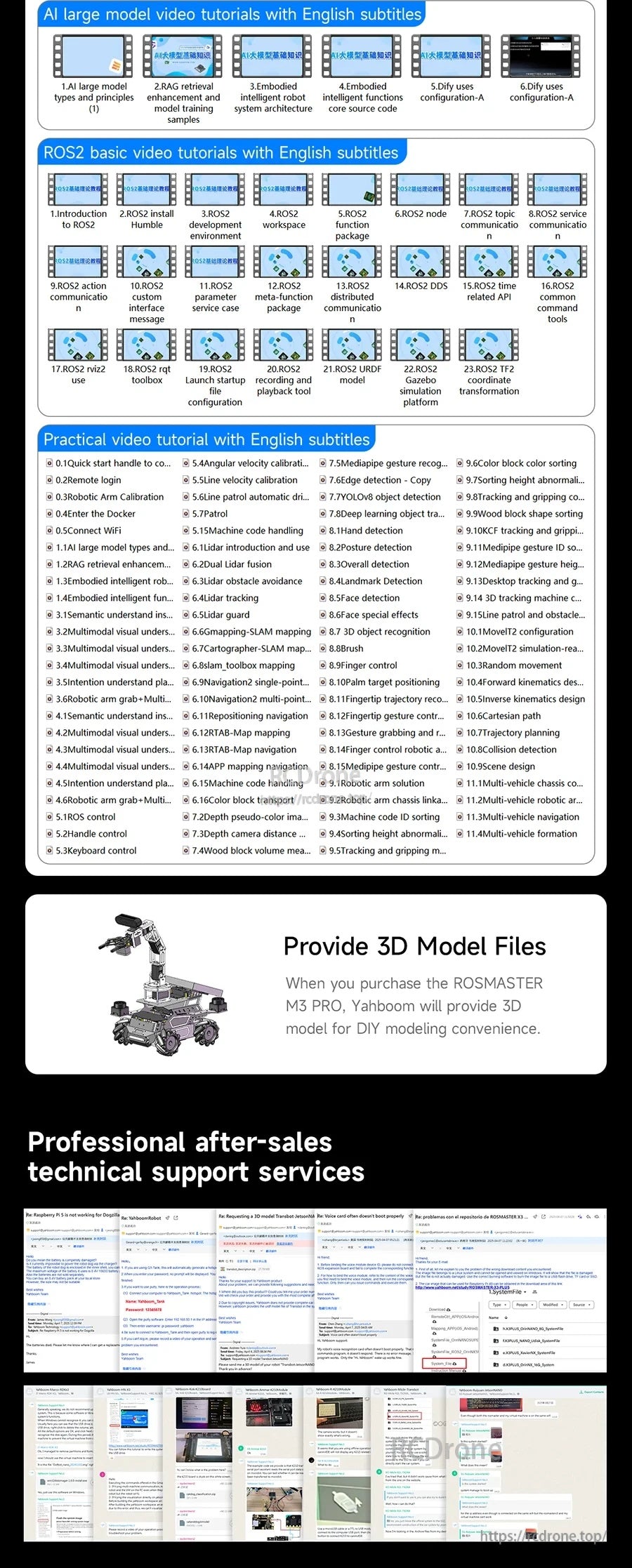
ROSMASTER M3 Pro zawiera samouczki wideo ROS2 z angielskimi napisami oraz dostarcza pliki modeli 3D wspierające rozwój i integrację.

Porównanie serii ROSMASTER przedstawia kluczowe różnice w typie podwozia, opcjach kamery RGBD, płytach sterujących i pojemności baterii, aby pomóc w wyborze odpowiedniej platformy robota ROS2.
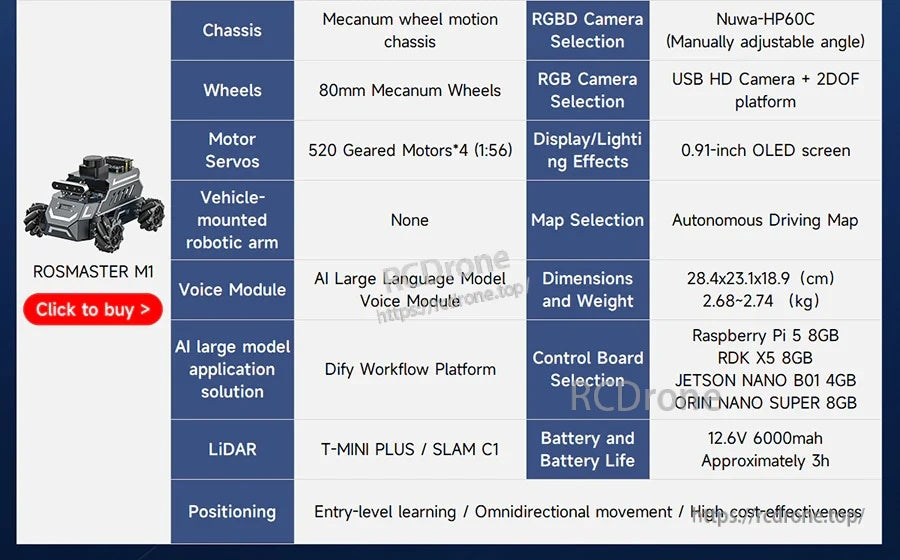
Platforma ROSMASTER M1 łączy podwozie z kołami mecanum i silniki z przekładnią 520 z opcjami kamery, LiDAR i płyty sterującej do rozwoju opartego na ROS.
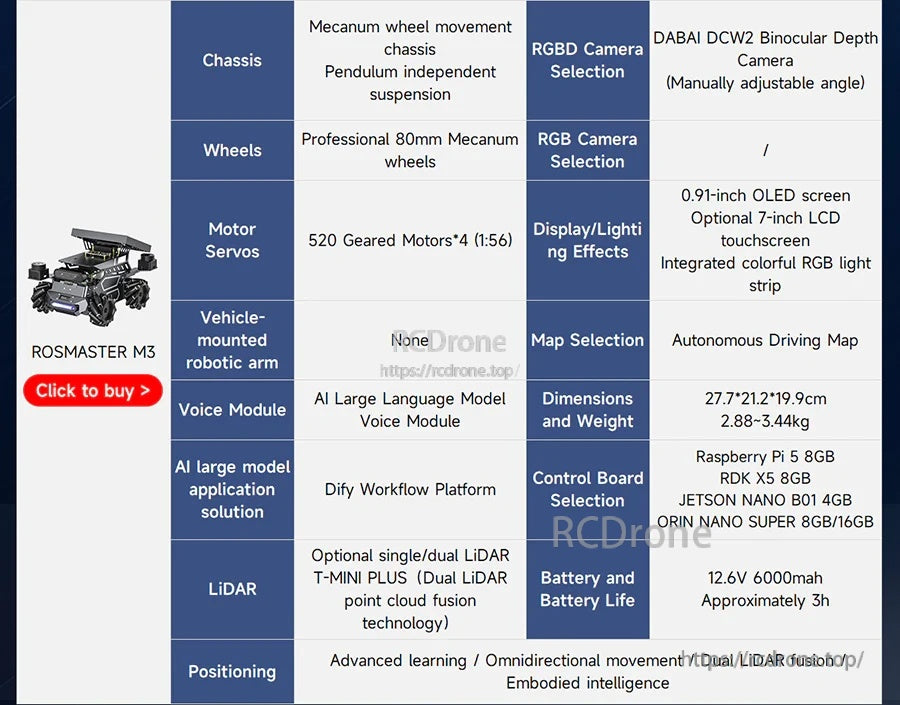
ROSMaster M3 Pro łączy podwozie z kołami mecanum z opcjami kamery RGBD, 0,91-calowym wyświetlaczem OLED/opcjonalnym 7-calowym ekranem dotykowym i baterią 12,6V 6000mAh.
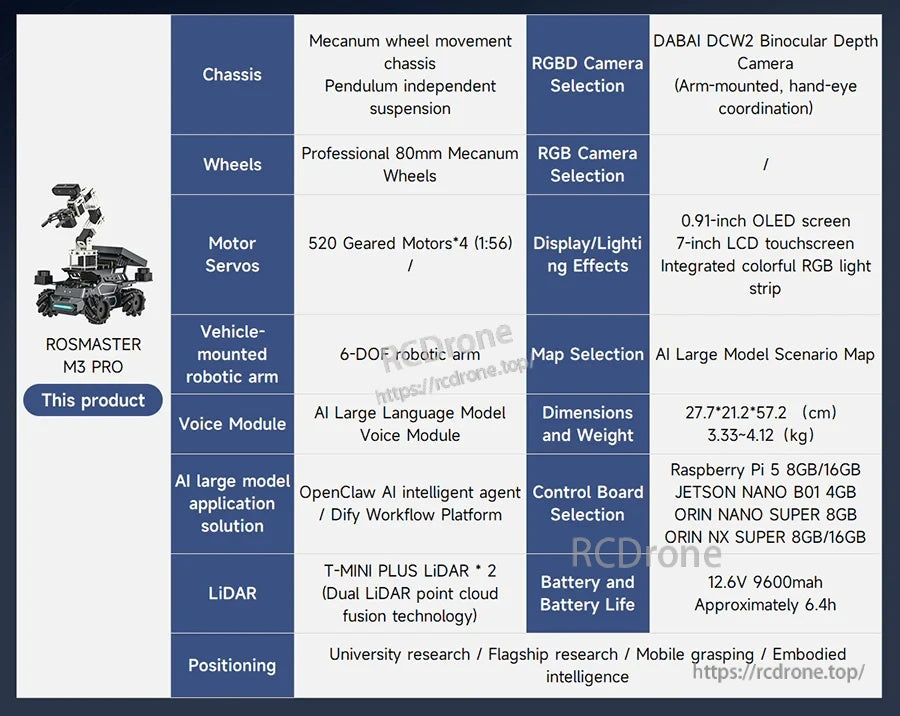
Platforma ROSMASTER M3 Pro zawiera podwozie z kołami mecanum, opcjonalną kamerę RGBD, 6‑DOF ramię robotyczne, podwójny LiDAR oraz opcje płyty sterującej Raspberry Pi lub Jetson.
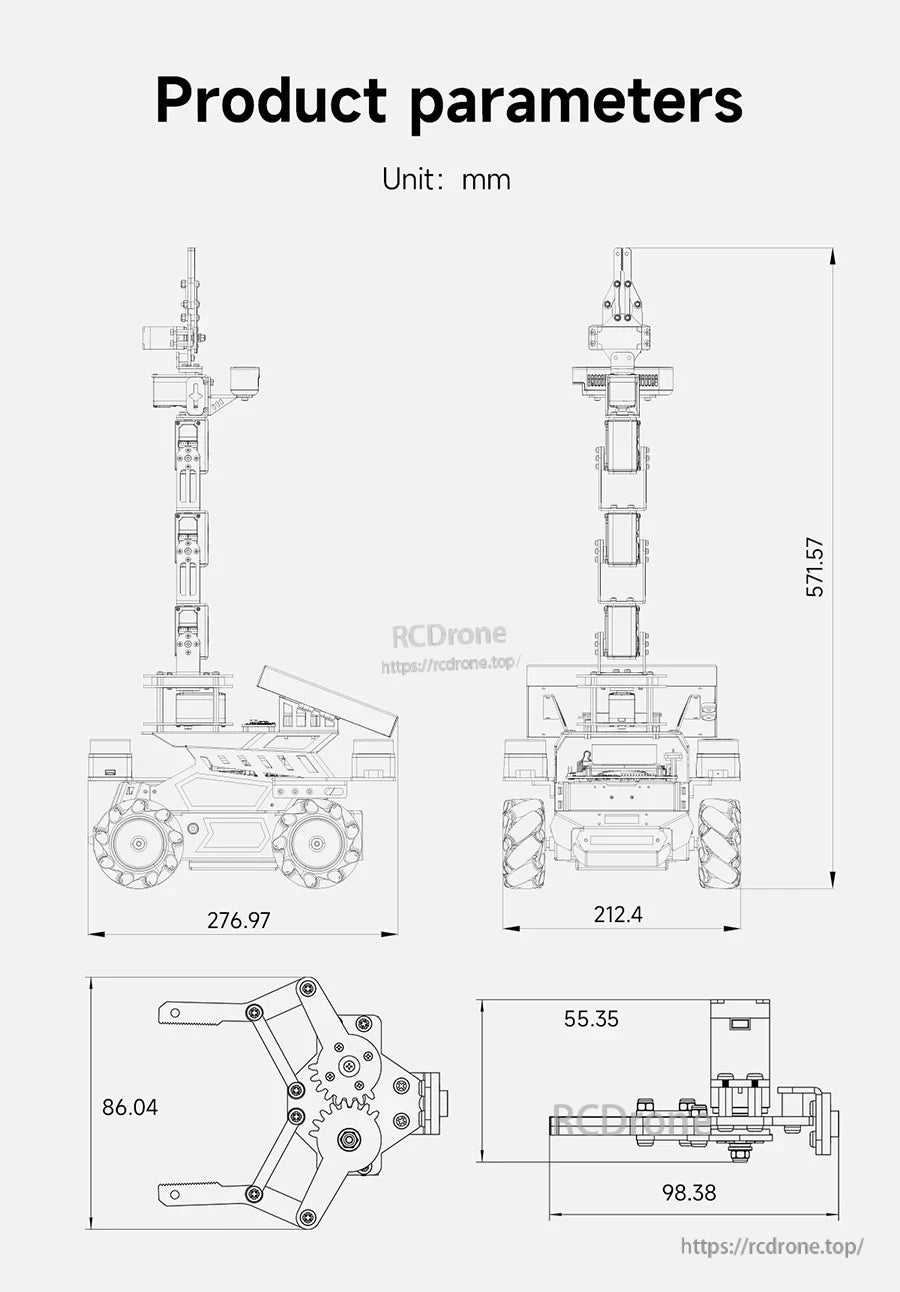
Rysunki wymiarowe robota Yahboom ROSMASTER M3 Pro ROS2 zawierają kluczowe wymiary całkowite w milimetrach do planowania dopasowania i montażu.
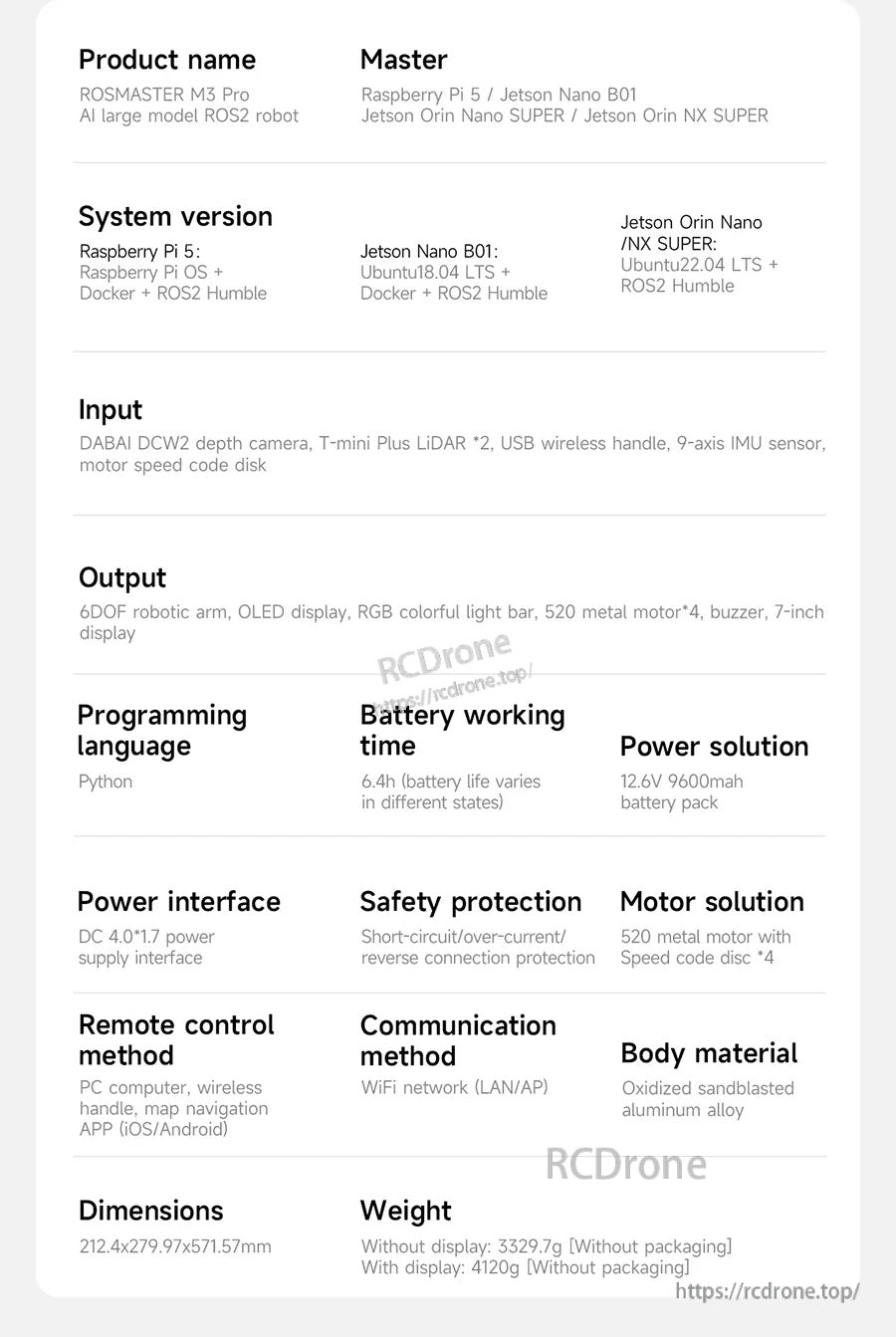
ROSMaster M3 Pro obsługuje platformy Raspberry Pi 5 lub Jetson Orin z programowaniem w Pythonie, siecią WiFi i pakietem baterii 12,6V 9600mAh.

Zestaw ROSMASTER M3 Pro zawiera podwozie robota, ramię 6DOF, kontroler, płytki rozszerzeń, baterie, uchwyty i podstawowe narzędzia do montażu.
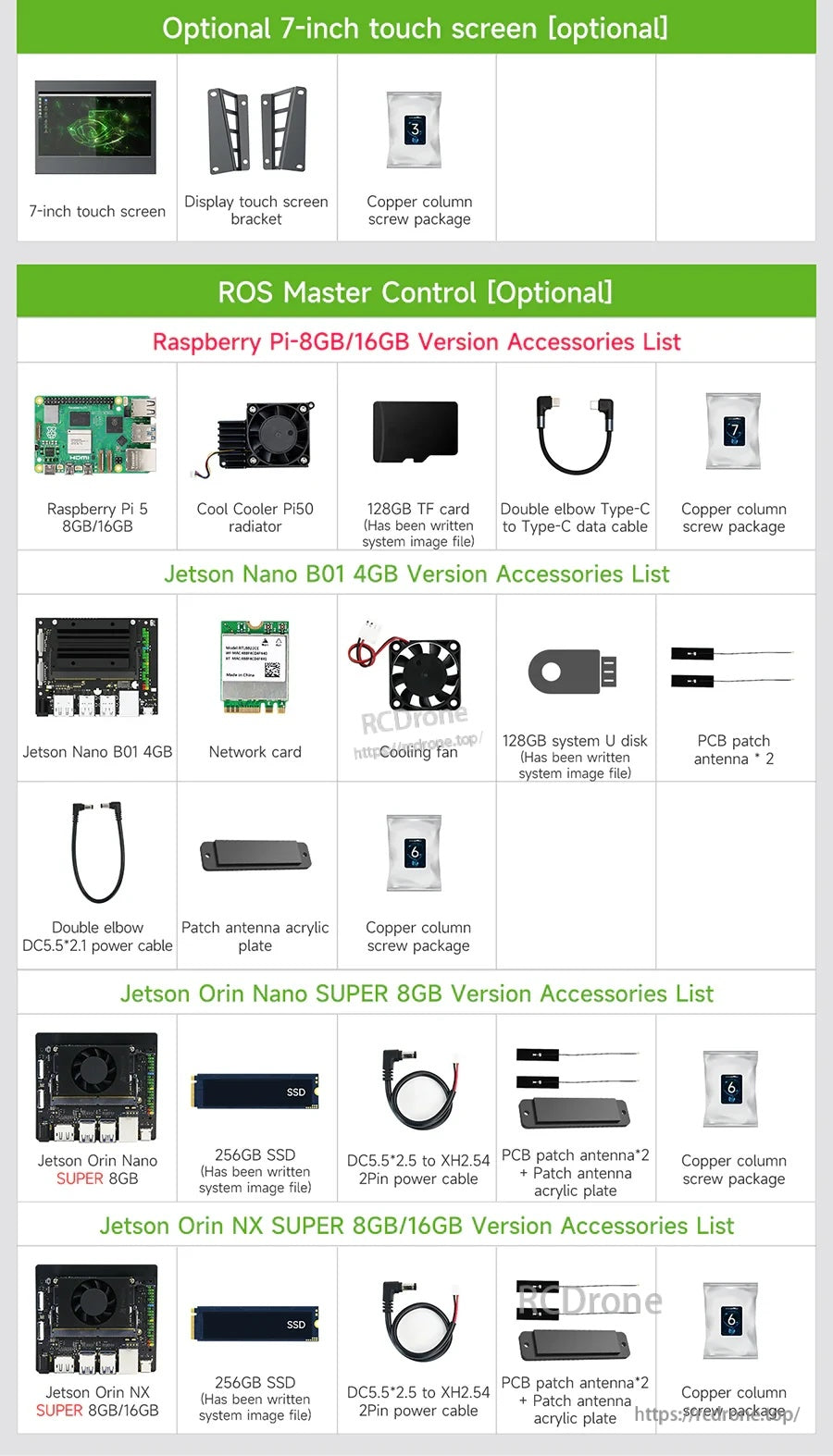
Opcjonalne zestawy akcesoriów są zorganizowane według opcji kontrolera, w tym zestaw z 7-calowym ekranem dotykowym oraz zestawy dla płyt Raspberry Pi lub NVIDIA Jetson z potrzebnymi kablami i mocowaniami.
Related Collections


























