




ZeroOne X6 AutoPilot Kontroler Lotu FMU v6X, STM32H753, ArduPilot, PX4 do drona VTOL
ZeroOne X6 AutoPilot Kontroler Lotu FMU v6X, STM32H753, ArduPilot, PX4 do drona VTOL
ZeroOne
Cena regularna
$519.00 USD
Cena regularna
Cena promocyjna
$519.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
ZeroOne X6 AutoPilot to kontroler lotu dla budowy dronów multirotorowych i VTOL, zaprojektowany w oparciu o otwartoźródłowy standard sprzętowy FMU v6X. Integruje wbudowane tłumienie wstrząsów, czujniki o niskim poziomie hałasu z konstrukcją kompensującą temperaturę oraz interfejs Ethernet 100Mbps dla rozszerzonej łączności.
Kluczowe cechy
- Architektura otwartoźródłowa FMU v6X z dokumentacją standardu złącza Pixhawk DS-009.
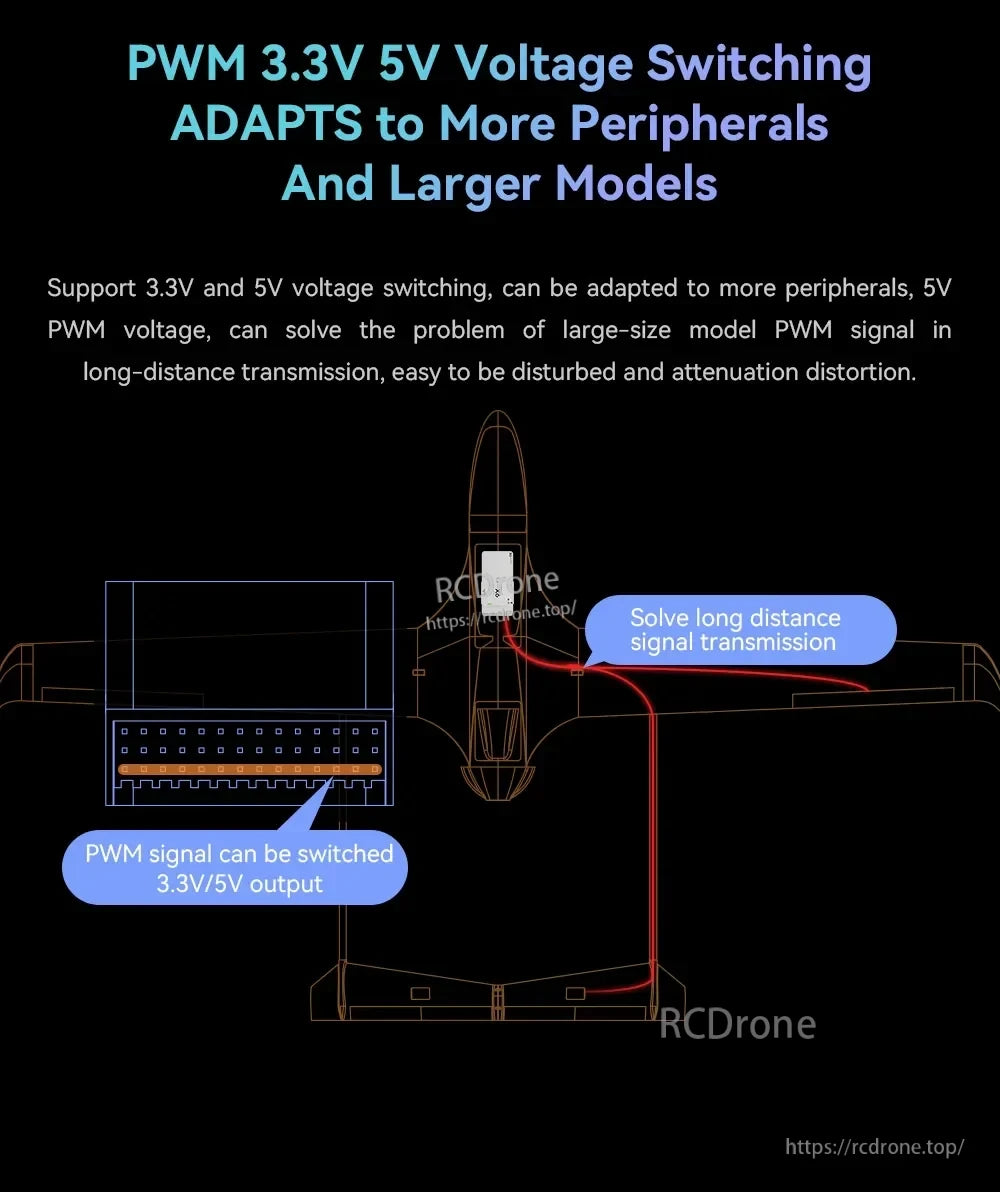
- Przełączanie napięcia PWM 3.3V/5V, aby dostosować się do różnych urządzeń peryferyjnych i pomóc w transmisji sygnału PWM na dużą odległość.
- Kompleksowy projekt ochrony: ochrona przed przeciążeniem/napieciem, ograniczenie prądu odbiornika, ochrona ESD dla portów oraz filtr EMI zasilania.
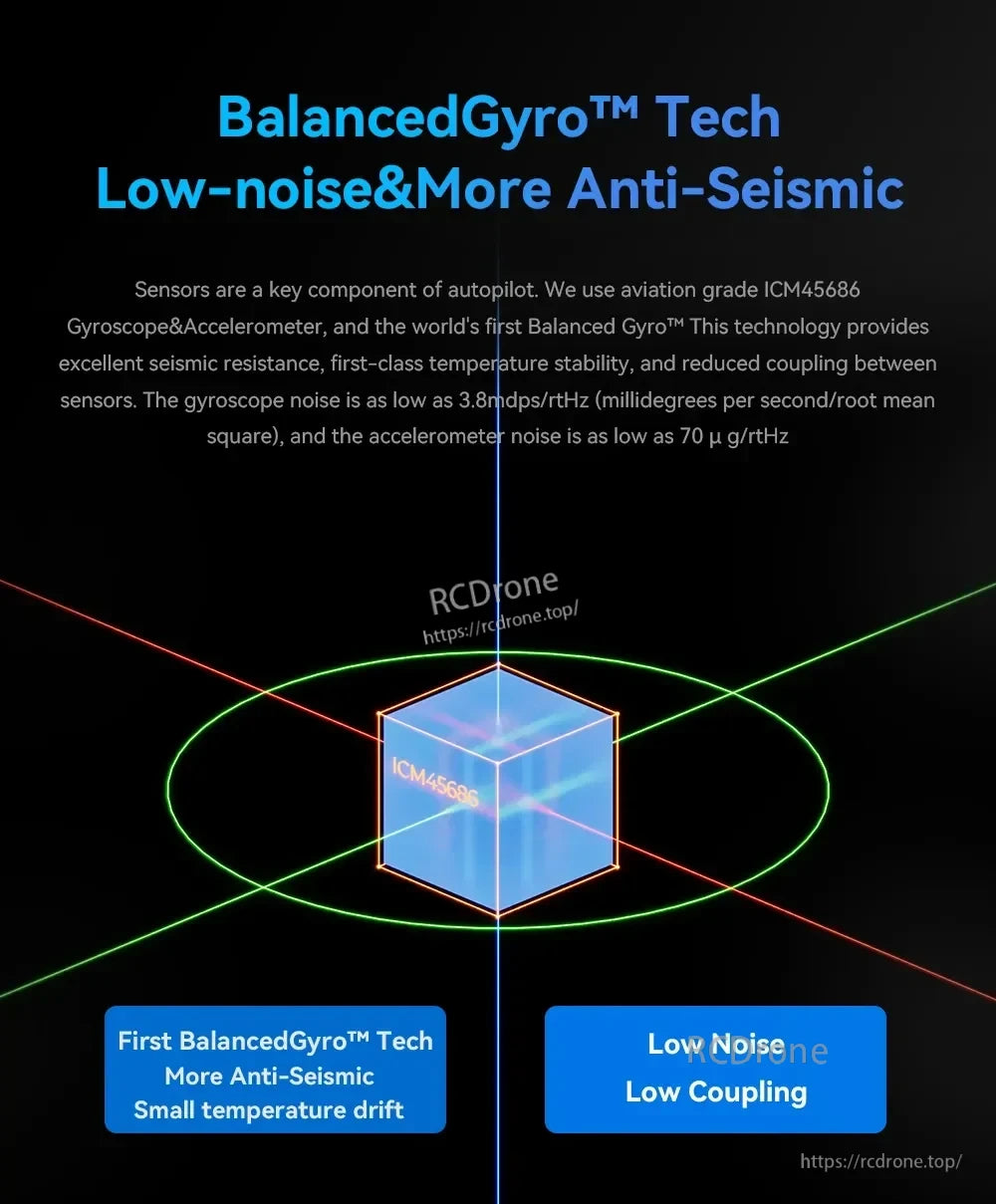
- Technologia BalancedGyro3 (ICM45686) z deklarowanym niskim poziomem hałasu i zmniejszonym sprzężeniem między czujnikami.
- Wsparcie dla oprogramowania układowego: ArduPilot (PX4 wkrótce).
W celu uzyskania wsparcia w zamówieniach i pytań dotyczących kompatybilności, skontaktuj się z obsługą klienta pod [email protected] or odwiedź https://rcdrone.top/.
Specyfikacje
| Przedmiot | Specyfikacja |
|---|---|
| Standard sprzętowy | FMU v6X |
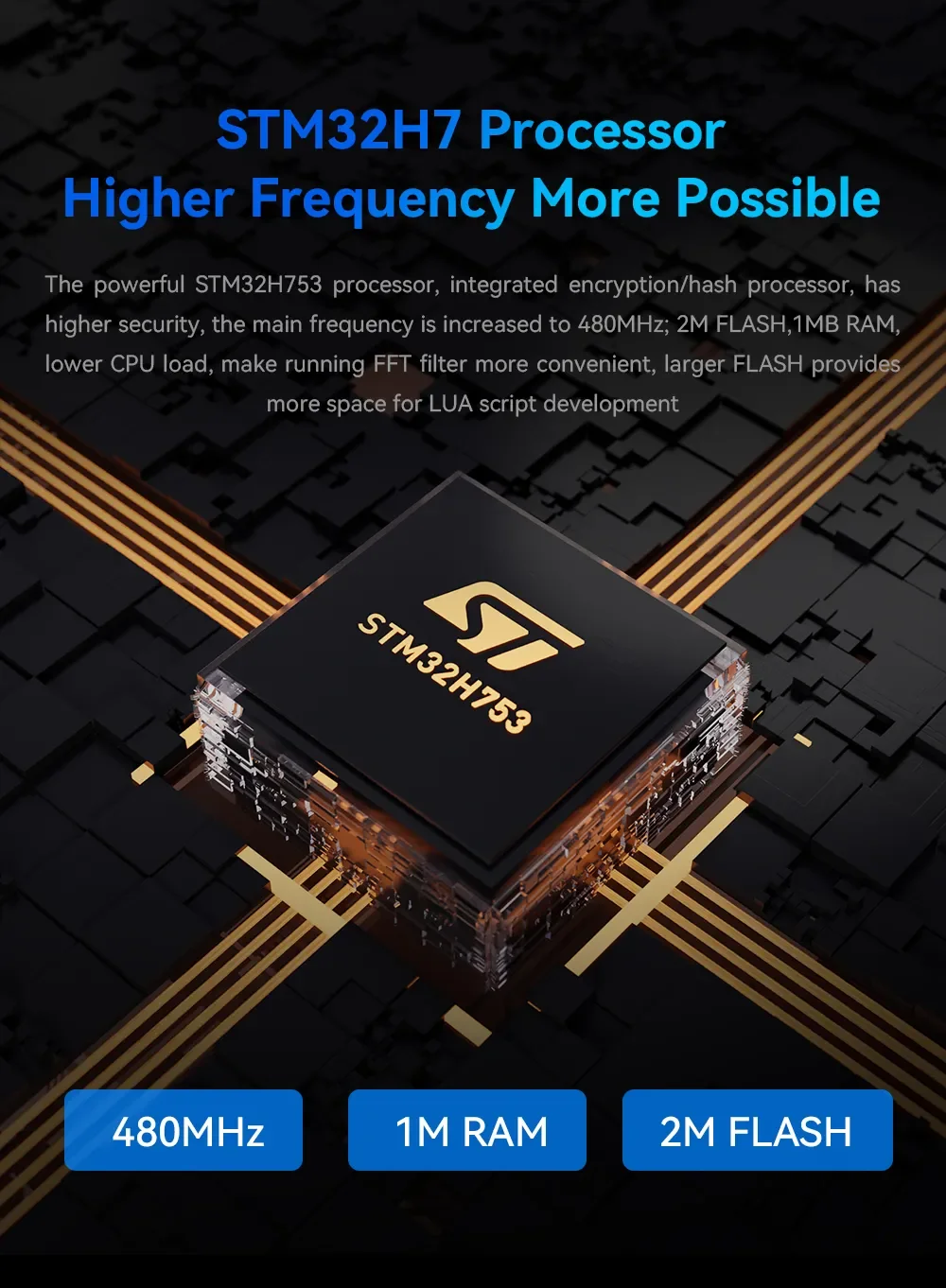
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Wbudowane tłumienie wstrząsów | TAK |
| Akcelerometry &i żyroskopy | ICM45686 + ICM45686 + BMI088 |
| BalancedGyro3 podany szum żyroskopu | 3.8 mdps/rtHz |
| Wyważony żyroskop 3 wskazany szum akcelerometru | 70 ug/rtHz |
| Barometr | ICP-20100 x2 |
| Kompas | RM3100 |
| Przekaźnik PWM | TAK |
| Wejście protokołu RC | SBUS + DSM + PPM |
| Ilość PWM | 16 (14 portów DuPont + 2 porty rozszerzeń GH1.25) |
| Przełączanie napięcia PWM | Obsługiwane jest przełączanie między 3.3V a 5V |
| Interfejs zasilania | 2 porty zasilania DroneCAN |
| Monitorowanie napięcia serwomechanizmu | 9.9 V |
| Szczegóły interfejsu | CAN x2; GPS&Bezpieczeństwo x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Temperatura pracy | -20 C ~ 85 C |
| Waga | 93 g |
| Napięcie robocze | 4.5 V do 5.4 V |
| Wsparcie oprogramowania układowego | ArduPilot (PX4 wkrótce) |
| Wartości rysunku mechanicznego (jednostka nieokreślona) | 38.8; 17.2; 13 |
Aplikacje
- Budowa i konserwacja dronów wielowirnikowych
- Budowa dronów VTOL wymagających kontrolera lotu FMU v6X
- Wymiana istniejącego ZeroOne modułu kontrolera lotu X6
Szczegóły




Related Collections




