






ZeroOne X6 Pro Autopilot Kontroler Lotu FMU v6X STM32H753, Potrójny IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne X6 Pro Autopilot Kontroler Lotu FMU v6X STM32H753, Potrójny IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne
Nie można załadować gotowości do odbioru
Przegląd
ZeroOne X6 Pro to kontroler lotu z autopilotem oparty na architekturze open-source FMU v6X (standard złącza Pixhawk DS-009), zaprojektowany do pracy w środowiskach o wysokich wibracjach i wspierający oprogramowanie ArduPilot oraz PX4. Integruje czujniki przemysłowej jakości, wbudowane tłumienie wstrząsów, potrójną redundancję IMU, kompensację temperatury IMU oraz interfejs Ethernet 100 Mbit dla rozszerzonej łączności.
Kluczowe cechy
- Standard sprzętowy FMU v6X open-source (kompatybilność ze standardem złącza Pixhawk DS-009 pokazana)
- Procesor: STM32H753; zintegrowany procesor szyfrujący/haszujący (zgodnie z deklaracją); główna częstotliwość zwiększona do 480MHz; 2M FLASH; 1M RAM
- Czujniki przemysłowej jakości o wysokiej odporności na wibracje, niskim poziomie hałasu i niskim dryfie temperaturowym (zgodnie z deklaracją)
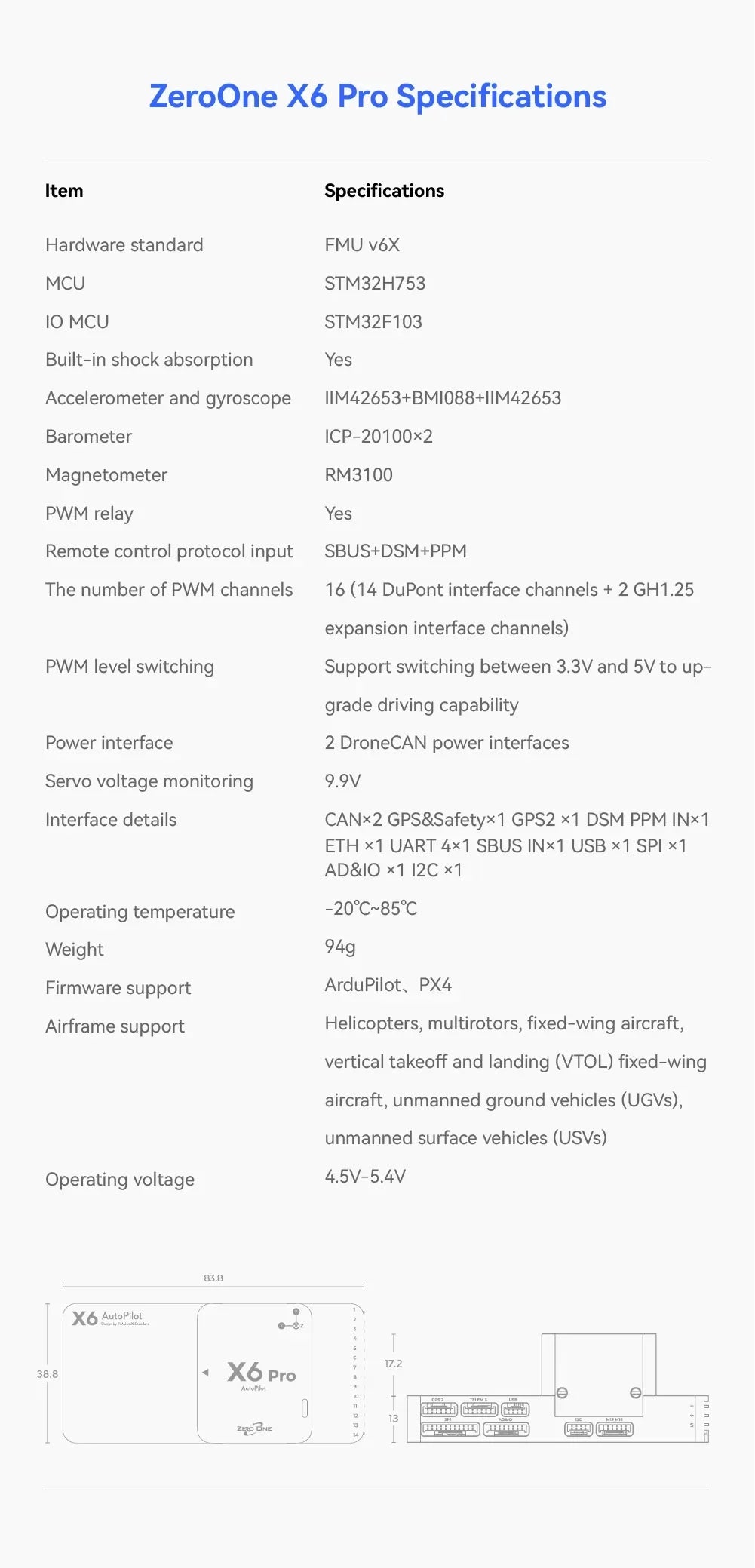
- Potrójna redundancja IMU oraz architektura redundancji wielu czujników (zgodnie z deklaracją)
- Kompenacja temperatury IMU (moc grzewcza zwiększona o 100%, zgodnie z deklaracją)
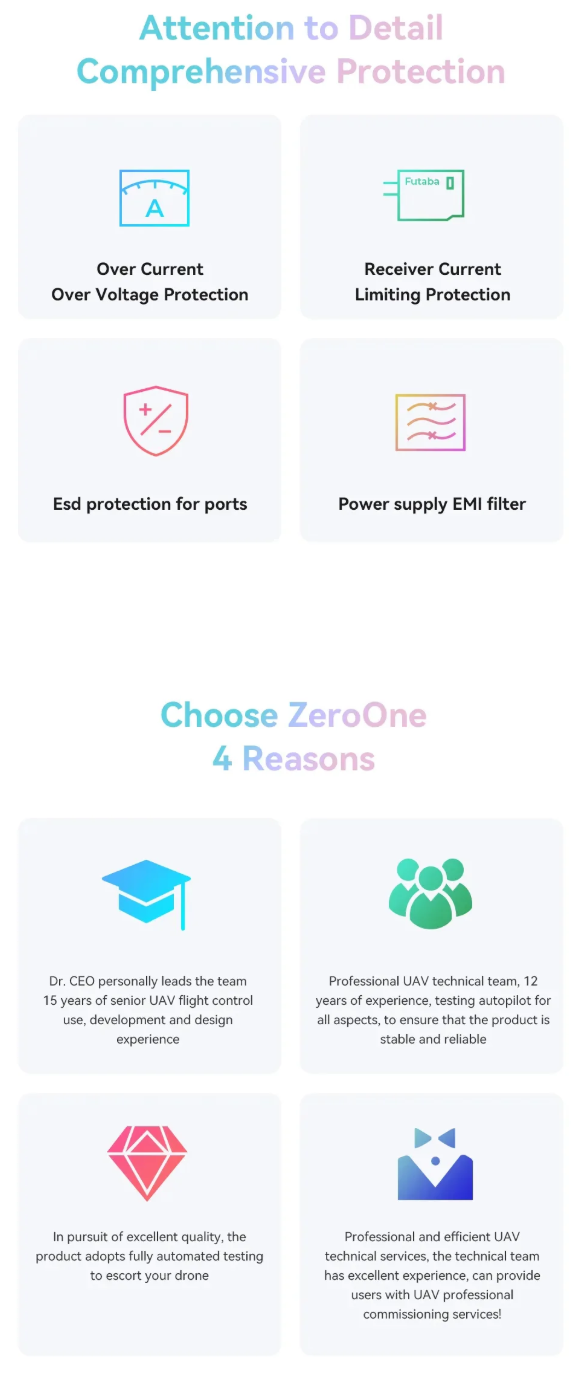
- Możliwość sterowania PWM z 3.3V/5V wsparcie dla przełączania poziomu/napięcia PWM
- Funkcje ochronne: ochrona przed przeciążeniem/ochrona przed nadmiernym napięciem; ograniczenie prądu odbiornika; ochrona ESD dla portów; filtr EMI zasilania
- Interfejs Ethernet 100 Mbit (ETH x1) do podłączania zewnętrznych komputerów/peryferiów (przykładowe platformy to Raspberry Pi i zestaw deweloperski serii Nvidia Jetson)
- Wsparcie dla DroneCAN przez interfejsy zasilania (2 interfejsy zasilania DroneCAN wymienione)
Specyfikacje
| Standard sprzętowy | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Częstotliwość CPU (zgodnie z danymi) | 480MHz |
| Pamięć (zgodnie z danymi) | 1M RAM |
| Pamięć Flash (zgodnie z danymi) | 2M FLASH | Wbudowana absorpcja wstrząsów | Tak |
| Akcelerometr i żyroskop (specyfikacja) | IIM42653 + BMI088 + IIM42653 |
| Żyroskop wspomniany w materiałach | ICM45686 (wspomniany w tekście funkcji); IIM42653 (wspomniany w notatce kodu ArduPilot i specyfikacji) |
| Barometr | ICP-20100 x2 |
| Magnetometr | RM3100 |
| Przekaźnik PWM | Tak |
| Wejście protokołu zdalnego sterowania | SBUS + DSM + PPM |
| Liczba kanałów PWM | 16 (14 kanałów interfejsu DuPont + 2 GH1.25 kanałów interfejsu rozszerzenia) |
| Przełączanie poziomu PWM | Wsparcie dla przełączania między 3.3V a 5V w celu zwiększenia możliwości zasilania |
| Interfejs zasilania | 2 interfejsy zasilania DroneCAN |
| Monitorowanie napięcia serw | 9.9V |
| Szczegóły interfejsu | CAN x2; GPS&Bezpieczeństwo x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Temperatura pracy | -20°C~85°C |
| Napięcie robocze | 4.5V~5.4V |
| Waga | 94g |
| Wsparcie oprogramowania układowego | ArduPilot, PX4 |
| Wsparcie dla konstrukcji | Śmigłowce; multirotory; samoloty o stałym skrzydle; samoloty o stałym skrzydle z pionowym startem i lądowaniem (VTOL); bezzałogowe pojazdy lądowe (UGV); bezzałogowe pojazdy nawodne (USV) |
| Wymiary zewnętrzne (jak pokazano) | 83.8 mm; 38.8 mm; 17.2 mm; 13 mm |
Czujniki przemysłowej jakości (wartości w tabeli)
| Żyroskop | ||
| Zasięg (°/s) (im większy, tym lepszy) | Czujnik X6 Pro: 4000 | ADIS16470: 2000; ICM20649: 4000; ICM20689: 2000 |
| Szum RMS (°/s/sqrt(Hz)) (im niższy, tym lepszy) | Czujnik X6 Pro: 0.005 | ADIS16470: 0.008; ICM20649: 0.0175; ICM20689: 0.006 |
| Wrażliwość krzyżowa (%) (im większa, tym lepsza) | Czujnik X6 Pro: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Dryf temperatury wrażliwości (°/s/°C) (im mniejszy, tym lepszy) | Czujnik X6 Pro: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| Akcelerometr | ||
| Zakres (g) (im większy, tym lepszy) | Czujnik X6 Pro: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| Hałas RMS (mg) (im niższy, tym lepszy) | Czujnik X6 Pro: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| Wrażliwość krzyżowa (%) (im niższa, tym lepsza) | Czujnik X6 Pro: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Dryf temperatury wrażliwości (%/°C) (im mniejszy, tym lepszy) | Czujnik X6 Pro: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
Aplikacje
- Śmigłowce
- Multi-copter
- Samoloty o stałym skrzydle
- VTOL samoloty o stałym skrzydle
- UGV
- USV
Podręczniki
Obsługa klienta: [email protected] (lub odwiedź https://rcdrone.top/).
Szczegóły
ZeroOne X6 Pro Kontroler lotu posiada czujniki przemysłowej jakości, wysoką precyzję, niski poziom hałasu oraz silną zdolność do sterowania PWM. Zbudowany dla samolotów o dużym ładunku, wykorzystuje architekturę open-source FMU v6X z kompatybilnością Pixhawk.
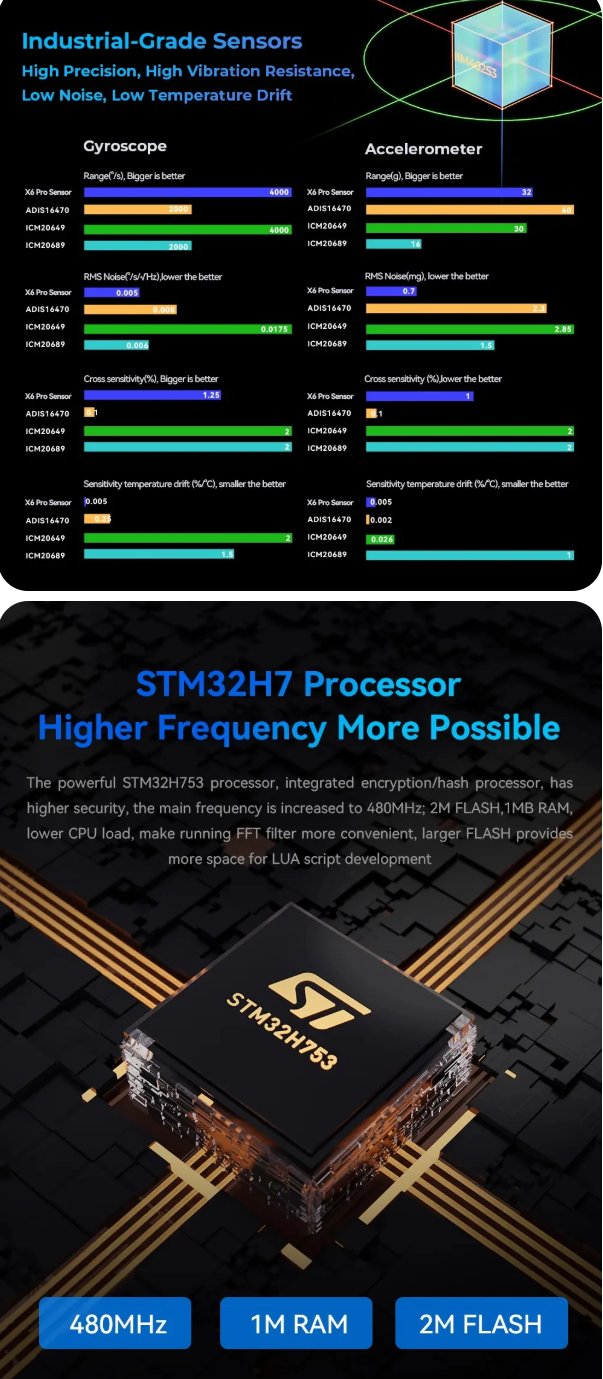
ZeroOne X6 Pro wykorzystuje czujniki przemysłowej jakości o wysokiej precyzji, niskim poziomie hałasu i odporności na wibracje.Działa na procesorze STM32H753 o częstotliwości 480MHz z 1MB RAM, 2MB FLASH, ulepszonym bezpieczeństwem, filtrowaniem FFT i wsparciem dla skryptów LUA.
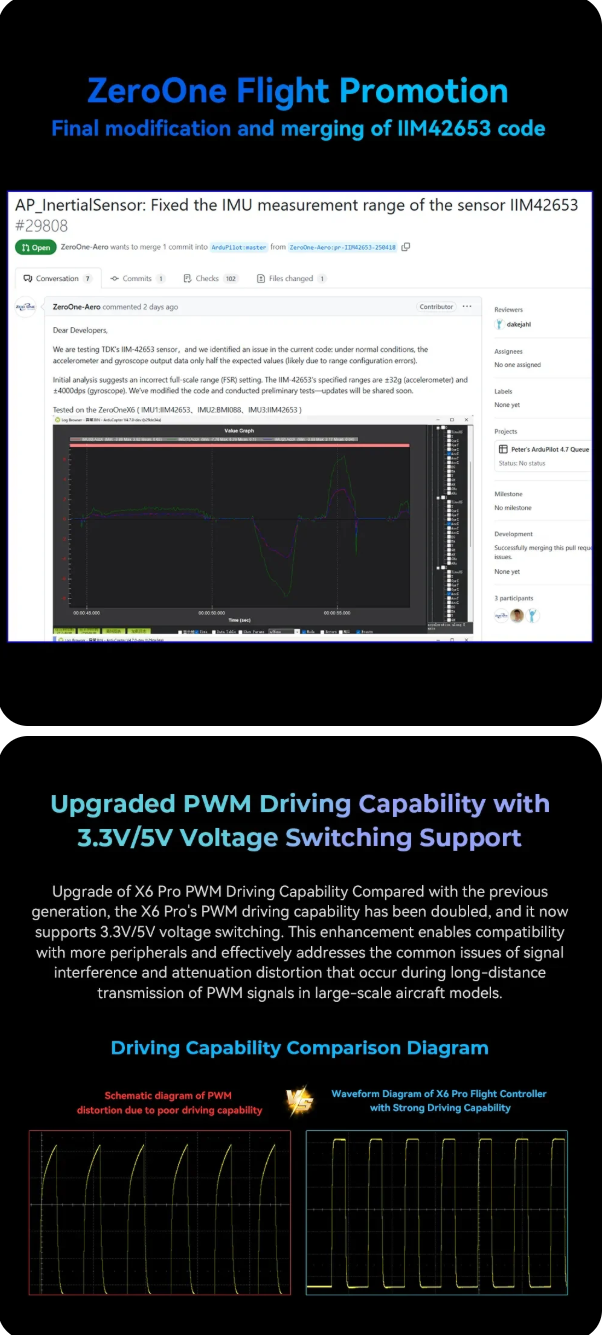
ZeroOne X6 Pro poprawia sterowanie PWM z przełączaniem 3.3V/5V, podwajając zdolność do redukcji zniekształceń sygnału. Naprawa zakresu czujnika IMU dla IIM42653 zapewnia dokładne pomiary, poprawiając stabilność lotu i kompatybilność z peryferiami.
ZeroOne X6 Pro oferuje kompleksową ochronę: przeciążeniowa, przepięciowa, ESD i filtrowanie EMI. Wspierany przez ponad 15-letnie doświadczenie w UAV, profesjonalny zespół zapewnia niezawodność, automatyczne testowanie i efektywne wsparcie techniczne dla optymalnej wydajności drona.

ZeroOne X6 Pro ma gąbkę amortyzującą dla stabilności, redukuje wibracje i hałas oraz zawiera interfejs Ethernet 100M do SLAM, śledzenia wizualnego i zaawansowanych funkcji drona z integracją Raspberry Pi lub Jetson.
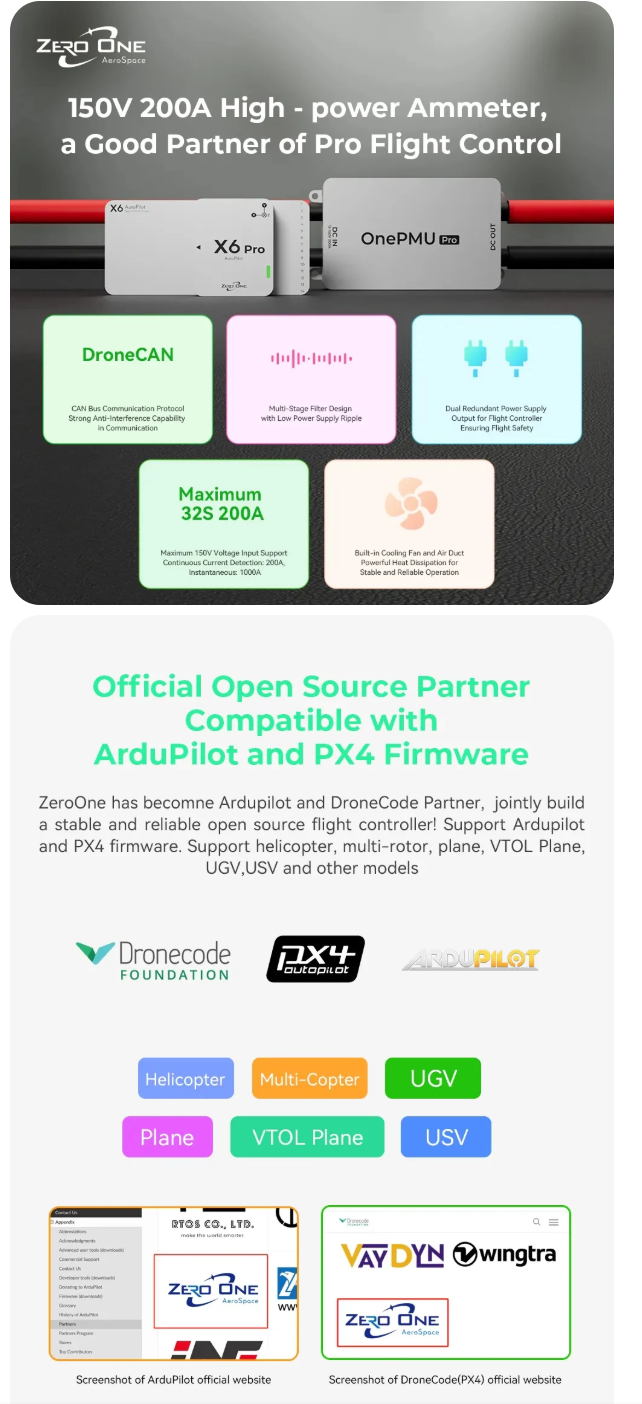
ZeroOne X6 Pro obsługuje 150V 200A, kompatybilny z ArduPilot i PX4.Cechy DroneCAN, podwójne zasilanie, wentylator chłodzący, a także pasuje do helikopterów, wielowirników, samolotów, VTOL, modeli UGV i USV do profesjonalnej kontroli lotu.
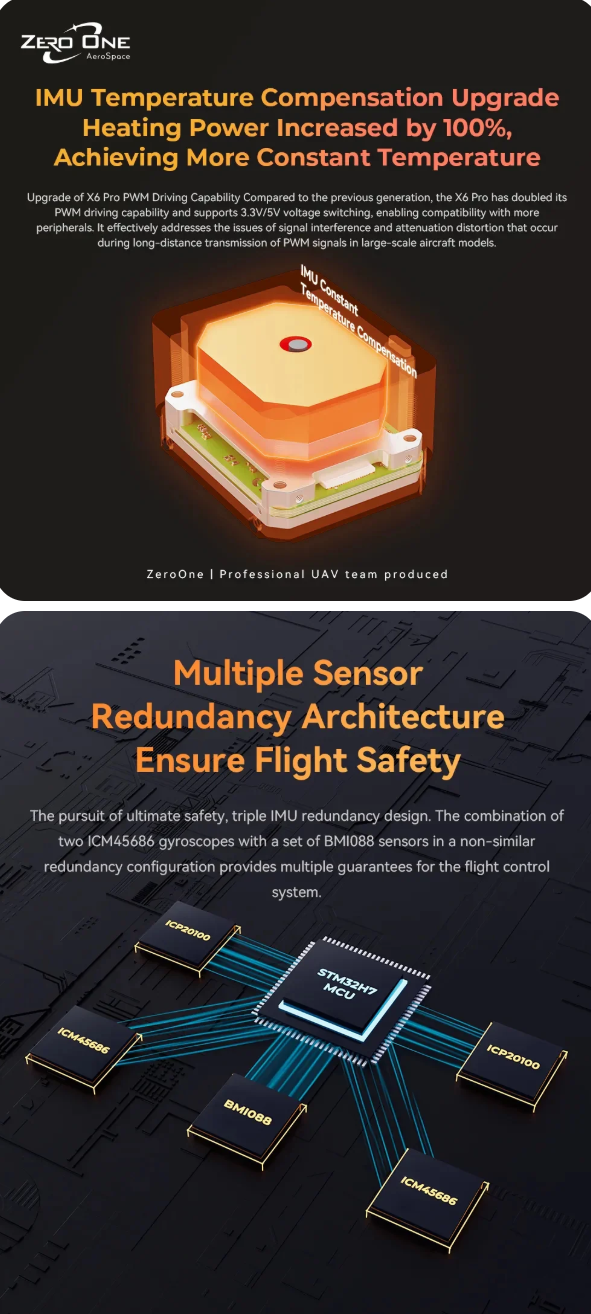
ZeroOne X6 Pro poprawia kompensację temperatury IMU, podwaja moc grzewczą i zapewnia bezpieczeństwo lotu dzięki potrójnej redundancji IMU z czujnikami ICM45686 i BMI088 połączonymi z MCU STM32H7.
ZeroOne X6 Pro oferuje FMU v6X, MCU STM32, 16 kanałów PWM, podwójne zasilanie DroneCAN, monitorowanie serw 9,9V, pracę w temperaturze -20°C–85°C, wagę 94g i wspiera ArduPilot/PX4 dla helikopterów, wielowirników, VTOL, UGV i USV.
Related Collections






