




CASBOT Handle-L1 Robotic Hand, 11 DOF Five-Finger Dexterous Hand, RS485/CANFD/EtherCAT, 24~60V
CASBOT Handle-L1 Robotic Hand, 11 DOF Five-Finger Dexterous Hand, RS485/CANFD/EtherCAT, 24~60V
CASCAS
Couldn't load pickup availability
Overview
CASBOT Handle-L1 is a robotic hand designed as a highly integrated, general-purpose, lightweight, dexterous robotic hand for precision, stability, and agility in embodied manipulation.
For product selection and integration support, contact [email protected] or visit https://rcdrone.top/.
Key Features
- 11 degrees of freedom: 6 active DOF + 5 passive DOF across 11 collaborative joints; 1:1 human-hand proportions.
- Long-life operation: continuous operation exceeds 1,000,000 cycles without failure; fingertip repeat positioning accuracy reaches ±0.1 mm.
- Load capability: fingertip force >10N per finger; total grip strength >10kg; capable of steadily lifting objects >25kg.
- Fast repeated open/close: <0.6s.
- Gripping diameter range: 16-95 mm; suitable for cylinders, prisms, spheres, discs, and irregular objects.
- Open interface protocol with built-in preset commands; pre-programmed motion sequences available.
- Interfaces: RS485/CANFD/EtherCAT (also listed: CAN, RS-485, EtherCAT).
- Software compatibility: Windows/Linux/MacOS/ROS2 (also listed: Win/Ubuntu/ROS/ROS2).
- Pro Edition option with tactile sensing parameters (see Specifications).
Specifications
Edition comparison (from technical specification table)
| Parameter | Standard Edition | Pro Edition (with Tactile Sensing) |
|---|---|---|
| Dimensions | 194mm*84mm*52mm | 194mm*84mm*52mm |
| Weight | Approx. 610g | Approx. 610g |
| Degrees of Freedom (DOF) | 11 (6 active) | 11 (6 active) |
| Static Vertical Grip Load | >10kg | >10kg |
| Static Horizontal / Lifting Grip Load | >25kg | >25kg |
| Continuous No-Failure Cycles | 1,000,000 cycles | 1,000,000 cycles |
| Operating Voltage | 24~60V | 24~60V |
| Static Current | 80mA | 80mA |
| No-Load Current | 350mA | 350mA |
| Communication Interface | RS485/CANFD/EtherCAT | RS485/CANFD/EtherCAT |
| Software Compatibility | Windows/Linux/MacOS/ROS2 | Windows/Linux/MacOS/ROS2 |
| Repeatability / Repeat Positioning Accuracy | ±0.1mm | ±0.1mm |
| Four-Finger Fingertip Force | >10N | >10N |
| Repeated Opening/Closing Speed | <0.6s | <0.6s |
| Minimum Gripping Diameter | 16mm | 16mm |
| Maximum Gripping Diameter | 95mm | 95mm |
| Fingertip Tactile Force Range | N/A | 0.15-20N |
| Fingertip Tactile Resolution | N/A | 0.1N |
| Tactile Trigger Force | N/A | 0.15N |
| Consistency Variation Between Contact Points | N/A | ≤±10% |
| Tactile Response Time | N/A | ≤5ms |
Additional published figures
| Height | 192mm |
| Width | 80mm |
| Thickness | 45mm |
| Weight (approx.) | 600g |
| Grasping range | 16-95mm |
| Grip strength | Pinch Force 14N / Lateral Pinch Force 25N |
| Control systems | PositionClosed-Loop / Force-Position Hybrid Closed-Loop |
Applications
- Embodied manipulation platforms and humanoid robots.
- Research & education: algorithm development; system customization.
- Home tasks: pull/pass tissues, pick/place food, pick/place clothing, receive/pass water.
- Productive labor tasks: drill holes, tighten bolts, move materials, press buttons.
- Service & guidance interactions: handshake, pointing, waving.
Manuals
Details

CASBOT Handle-L1 uses a five-finger, articulated design for precise dexterous manipulation in robotic applications.

The CASBOT Handle-L1 five-finger dexterous hand uses 11 degrees of freedom, combining 6 active and 5 passive joints for natural motion.
CASBOT Handle-L1 is described as supporting over 1 million continuous cycles and fingertip repeat positioning accuracy of ±0.1 mm.

CASBOT Handle-L1 robotic hand features adaptive force control with >10N fingertip force per finger and >10kg total grip strength for handling a wide range of objects.

An open interface protocol with built-in preset commands helps streamline integration with robotic arms and teleoperation systems.
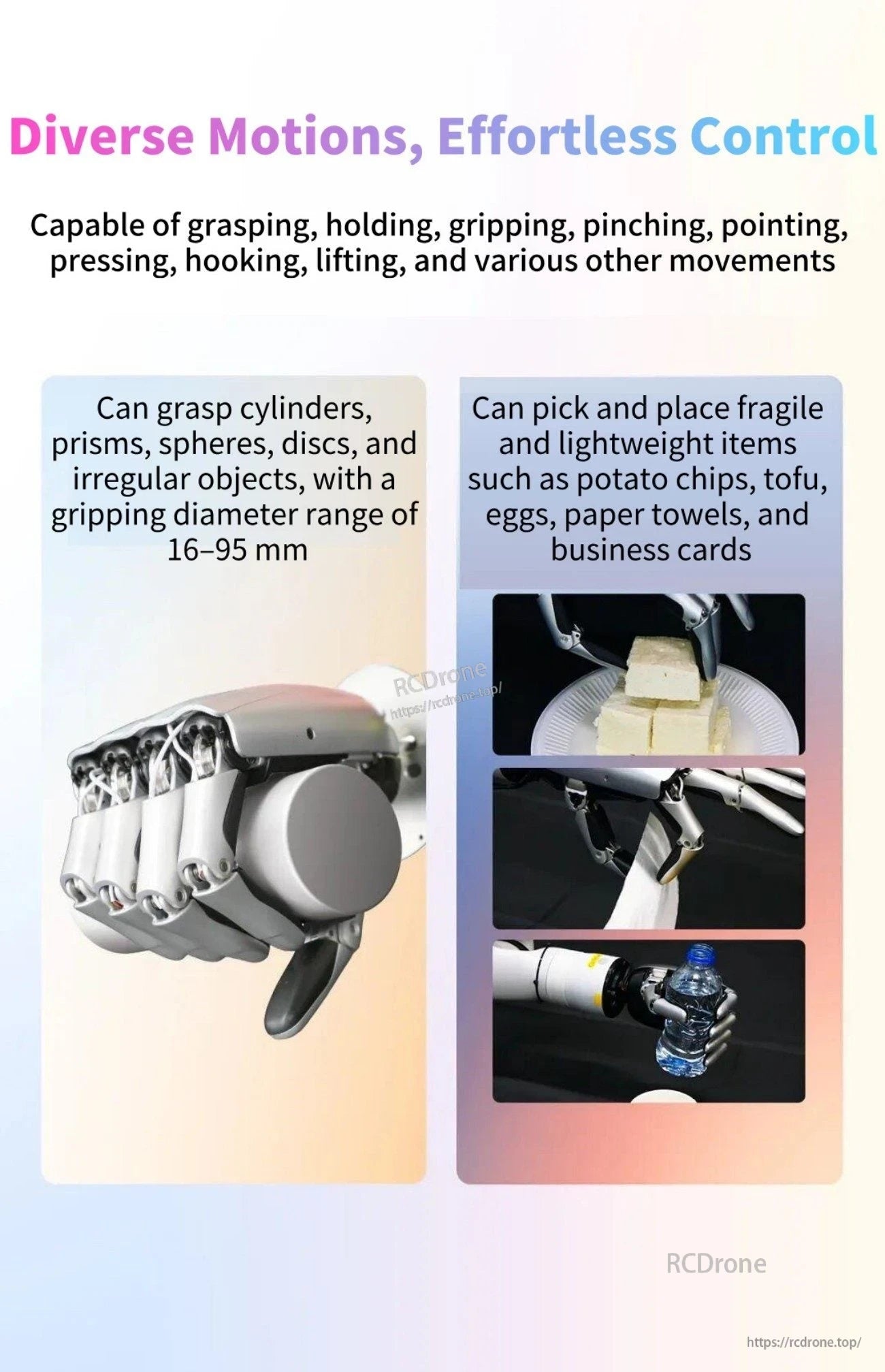
CASBOT Handle-L1 supports diverse grasps with a 16–95 mm gripping diameter range and can handle lightweight, fragile items like tofu and bottles.

The CASBOT Handle-L1 robotic hand is presented for home tasks, productive labor, service gestures, and research or education workflows.

CASBOT Handle-L1 is a five-finger dexterous robotic hand with 11 DOF (6 active + 5 passive) and support for CAN, RS-485, and EtherCAT integration.
Related Collections




