




CEREBOTO OpenArm 7DOF Robotic Arm Kit – DIY or Pre-Assembled, Open-Source ROS/Python Control
CEREBOTO OpenArm 7DOF Robotic Arm Kit – DIY or Pre-Assembled, Open-Source ROS/Python Control
CEREBOTO
Couldn't load pickup availability
Overview
The CEREBOTO OpenArm 7DOF Robotic Arm is a research-grade, human-scale robotic arm designed for universities, labs, startups and serious makers. With 7 degrees of freedom, 633 mm arm reach, typical payload of 4.1 kg and peak payload of 6.0 kg per arm, OpenArm delivers high-precision motion, safe physical interaction and rich open-source tools.
You can choose a DIY hardware kit for full hands-on assembly, or a factory-calibrated, ready-to-use finished arm. Single-arm, dual-arm and quad-arm configurations are available.
Key Features
-
7DOF human-scale robotic arm – designed to match a 160–165 cm human arm length for natural manipulation and teleoperation.
-
High payload & stability – typical payload 4.1 kg, peak payload 6.0 kg per arm, with lightweight 5.5 kg arm weight.
-
Backdrivable motors & compliant structure – safe, smooth interaction for human–robot collaboration and force-controlled tasks.
-
1 kHz CAN-FD control loop – real-time, low-latency control for high-performance research and industrial-grade applications.
-
All-metal construction – robust aluminum-alloy and stainless-steel main structure for stiffness and durability.
-
Open-source hardware & software – open CAD, PCB, firmware and control software for deep customization.
-
ROS, Python and C++ support – official ROS integration plus Python/C++ APIs for rapid algorithm development.
-
Rich ecosystem and expansion – supports dexterous robotic hands, motion-capture gloves and mobile bases for complete robotic platforms.
Technical Specifications
-
Degrees of Freedom: 7 DOF per arm
-
Arm Reach: 633 mm
-
Typical Payload: 4.1 kg
-
Peak Payload: 6.0 kg per arm
-
Arm Weight: approx. 5.5 kg per arm
-
Materials: Aluminum-alloy and stainless-steel structural parts
-
Control Interface: CAN / CAN-FD, UART (via included USB2CANFD-X2 adapter on dual/quad-arm versions)
-
Control Frequency: up to 1 kHz CAN-FD loop
-
Software Support: ROS framework, Python API, C++ API
-
Ergonomics: arm length suited to users with 160–165 cm body height
Software & Open-Source Ecosystem
OpenArm is a fully open-source robotic arm platform. The official resources include:
-
Website: openarm.dev
-
Documentation: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Tutorial Video: official YouTube guide for getting started
With open CAD, PCB and firmware files, you can modify mechanics, electronics and control software, or extend the arm with new sensors and end-effectors for your own research topics.
Typical Application Scenarios
OpenArm is designed as a versatile, high-precision research and teaching platform for:
-
University robotics courses and lab experiments
-
Research institutes and laboratory projects
-
Reinforcement learning and physics-based AI research
-
Human-robot interaction and collaborative robot studies
-
Makerspaces and open-source hardware teams
-
Engineering education and training platforms
With its human-scale size and compliant actuation, OpenArm is ideal for manipulation, teleoperation, imitation learning, assistive robotics and more.
Product Versions & Configurations
Version 1 – DIY Hardware Kit
-
For users with strong hands-on skills who want to deeply understand the mechanical structure.
-
Includes all mechanical, electrical and 3D-printed parts; you assemble and calibrate the arm yourself following the manual.
Version 2 – Finished Robotic Arm
-
For research institutes, labs, companies and educators who need a plug-and-play platform.
-
Fully assembled, tuned and calibrated before shipping; ready to use out of the box.
Available arm configurations (depending on listing):
-
DIY Kit – Single Arm
-
Finished Arm – Single Arm
-
DIY Kit – Dual Arms
-
Finished Arms – Dual Arms
-
DIY Kit – Quad Arms
-
Finished Arms – Quad Arms
Package Contents
Each OpenArm kit or finished system typically includes:
-
Aluminum-alloy and stainless-steel main structural components
-
Motors, driver boards, power supply and cables
-
3D-printed parts and screw sets
-
Dual-arm and quad-arm versions: one official BOM-compatible USB2CANFD-X2 device (CEREBOTO is the authorized domestic agent) for PC-to-CAN-FD communication.
Supported Hardware Extensions
OpenArm supports multiple hardware add-ons (sold separately), enabling you to build a complete robotic system:
-
Dexterous robotic hand – for fine manipulation and grasping research.
-
Motion-capture glove set – for intuitive teleoperation and imitation learning.
-
Mobile base – to turn OpenArm into a mobile manipulator platform.
FAQ
Q: Can the robotic arm be used immediately?
A: The finished-arm version is fully tuned and calibrated at the factory—just power it on and start working. The DIY hardware kit requires you to assemble and set up the system following the instructions.
Q: Is OpenArm compatible with ROS or other middleware?
A: Yes. OpenArm officially supports the ROS framework, and you can also control the arm via Python and C++ APIs.
Q: Who is this product for?
A: University and institute researchers, AI & robotics labs, teaching courses, engineering training centers, and advanced hobbyists.
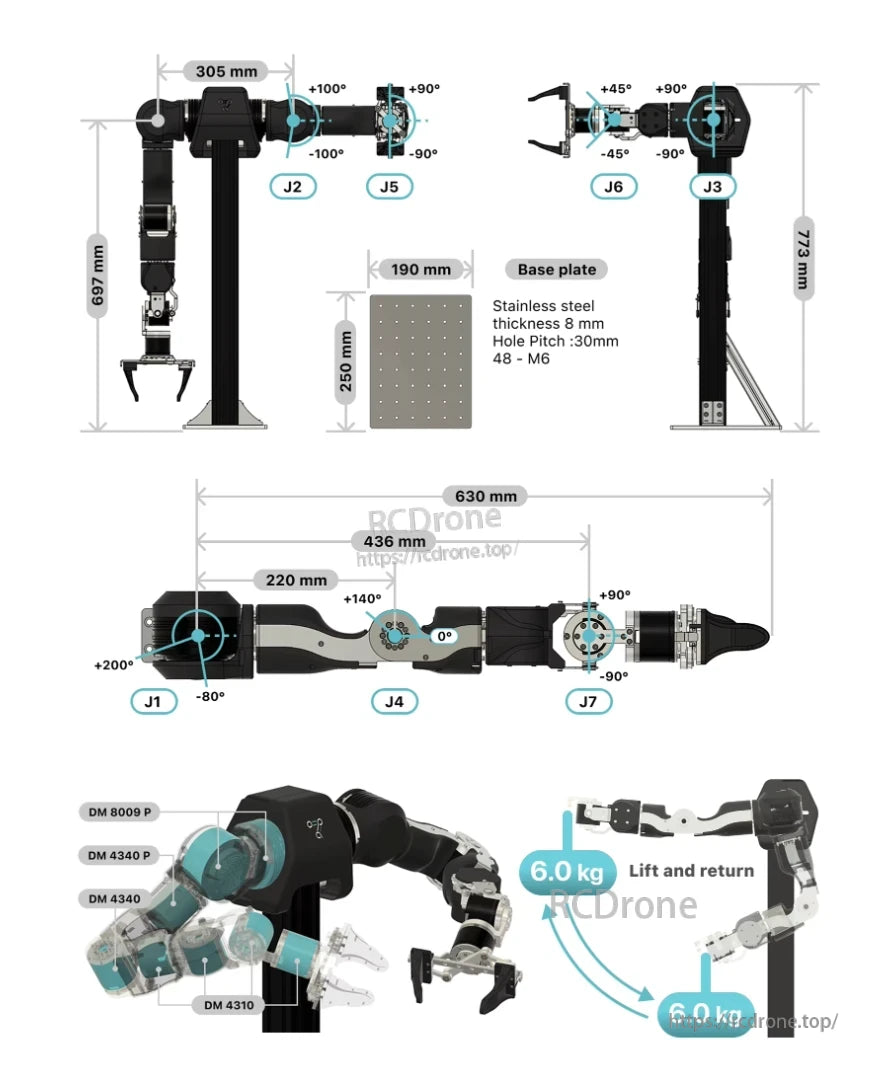
The Cereboto OpenArm 7DOF Robot Arm has seven joints (J1–J7) with defined angular ranges. It stands 697 mm or 773 mm tall, reaches 630 mm, and mounts on a 190×250 mm stainless steel base plate—8 mm thick with 48 M6 holes spaced at 30 mm pitch. Driven by DM8009P, DM4340P, DM4340, and DM4310 motors, it handles 6.0 kg payloads with precision. Designed for industrial and research use, it balances structural robustness with accurate motion control.

Related Collections



