






CUAV Pixhawk V6X V2 Drone Controller for PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV Pixhawk V6X V2 Drone Controller for PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV
Couldn't load pickup availability
Overview
CUAV Pixhawk V6X V2 is a Pixhawk-series drone controller designed for PX4 and ArduPilot autopilot firmware. It follows the Pixhawk FMU v6x standard and modular design philosophy, featuring upgraded industrial-grade redundant sensing, a constant-temperature external clock and MCU heat dissipation design, 5V/3.3V PWM level switching, and a patented shock absorption structure. The standard PMU 2 Lite power management module supports 70V input and 220A current detection.
Key Features
- H7 double-precision floating-point unit (STM32H753IIK6); 480MHz double precision floating-point unit; 2M Flash memory
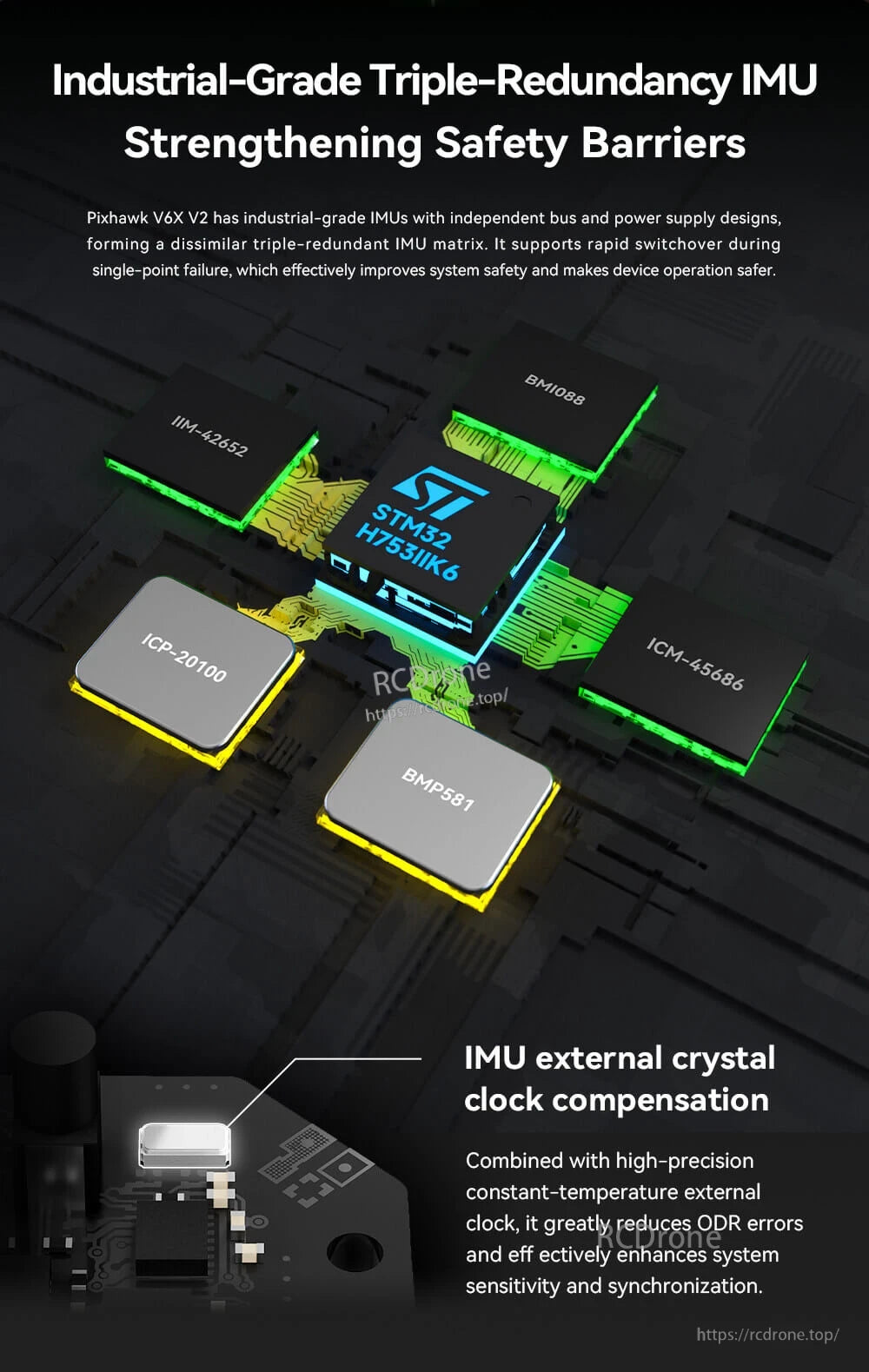
- Industrial-grade dissimilar triple-redundant IMU matrix with independent bus and power supply design (IIM-42652, BMI088, ICM-45686)
- Combined dual-redundant barometer (BMP581, ICP-20100)
- Core shock absorption system with three-axis (X, Y, Z) shock absorption; tilted four-corner support design; new type of shock-absorbing material
- Automotive-grade RM3100 magnetic compass for robust magnetic interference rejection
- IMU external crystal clock compensation (used with high-precision constant-temperature external clock to reduce ODR errors and improve sensitivity and synchronization)
- Constant temperature control system: thermal conductive silicone and IMU temperature compensation to reduce temperature-related drift
- Flexible software switching between 5V and 3.3V PWM output levels
- Integrated 100 Mbps Ethernet interface for high-speed data synchronization with devices such as mission computers and surveying cameras
- Supports secure boot and secure firmware update services
- Multi-redundant power supply design; supports 2-channel CAN PMU input; includes PMU 2 Lite as standard
- Bottom mounting holes added for direct screw mounting; mounting holes compatible with M2 standard screws
Specifications
| Processor | STM32H753IIK6 |
| Coprocessor | STM32F103 |
| Version | Pixhawk V6XV2 |
| CPU / memory (stated) | 480MHz double precision floating-point unit; 2M Flash memory |
| Accelerometer & gyroscope | IIM-42652; BMI088; ICM-45686 |
| Compass | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM level | 3.3V / 5V (software switching) |
| Power | 2 (2 CAN power interfaces) |
| GPS port | 2 (GPS1: GPS interface with I2C and safety switch; GPS2: interface with I2C and GPS) |
| TELEM port | 3 |
| CAN bus | 2 |
| PPM RC | 1 (dedicated input for PPM receiver) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum input; 1 analog 3.3V/PWM input) |
| SBUS outs | 1 |
| FMU debug | 1 |
| IO debug | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI external 1 | 1 (SP16 interface for external sensor expansion) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB port | 2 (Type-C x1; GH interface x1 for USB external connection) |
| TF card | 1 |
| Power module | Standard PMU 2 Lite (5V version), input voltage: 12-70V |
| Operating voltage | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Power: 4.85-5.45V |
| Operating temperature | -20 to 85C |
| Size | 45 x 85.1 x 29.2 mm |
| Weight | Controller: 97.9g; Core: 43.1g; Carrier board (including screws): 54.8g |
| Mounting note (diagram text) | Mounting holes compatible with M2 standard screws; dimensions shown: 72 mm; 22.50 mm; 24 mm |
What’s Included
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V Power Module x1
- PMU 2 Lite-5V Header Power Cable (X7+ (V6X) Version), wire length: 25cm x1
- CAN/I2C Extension Board x1
- TF Memory card x1
- Type-C Cable, wire length: 100cm x1
- DSM RC Cable, wire length: 30cm x1
- SBUS RC Cable, wire length: 30cm x1
- PPM RC/SBUS OUT Cable, wire length: 30cm x1
- Ethernet Cable, wire length: 40cm x1
- CAN Cable, wire length: 30cm x1
- TELEM Cable, wire length: 30cm x1
- UART 4 Cable, wire length: 30cm x1
- UART4 -> I2C Cable, wire length: 30cm x1
- ADIO Cable, wire length: 30cm x1
- Debug Cable, wire length: 10cm x1
- USB -> Type-C Female Connector Extension Cable, wire length: 50cm x1
- 3M Double-Sided x2
Applications
- Compatible with ArduPilot and PX4
- Supports multi-rotor, fixed-wing, VTOL fixed-wing, unmanned helicopter, unmanned vehicles, and unmanned ships (submersibles)
- High-speed Ethernet data synchronization with mission computers and other onboard devices where supported
For compatibility checks and setup questions, contact [email protected] or visit https://rcdrone.top/.
Video
Details

Pixhawk V6X V2 flight controller uses an H7 processor and lists triple-redundant IMU, dual barometer, and RM3100 compass with a shock-absorption design.

The Pixhawk V6X V2 uses an STM32H753IIK6 H7 processor to support PX4 and ArduPilot-based flight control setups.

Pixhawk V6X V2 uses a three-axis (X, Y, Z) shock-absorption mount with four tilted corner supports to help reduce vibration and noise.
Pixhawk V6X V2 flight controller design features a triple-redundant IMU setup around the STM32H753IIK6, plus external crystal clock compensation for sensor timing.

Pixhawk V6X V2 integrates an automotive-grade RM3100 magnetometer and supports GPS heading determination for more stable orientation and navigation.
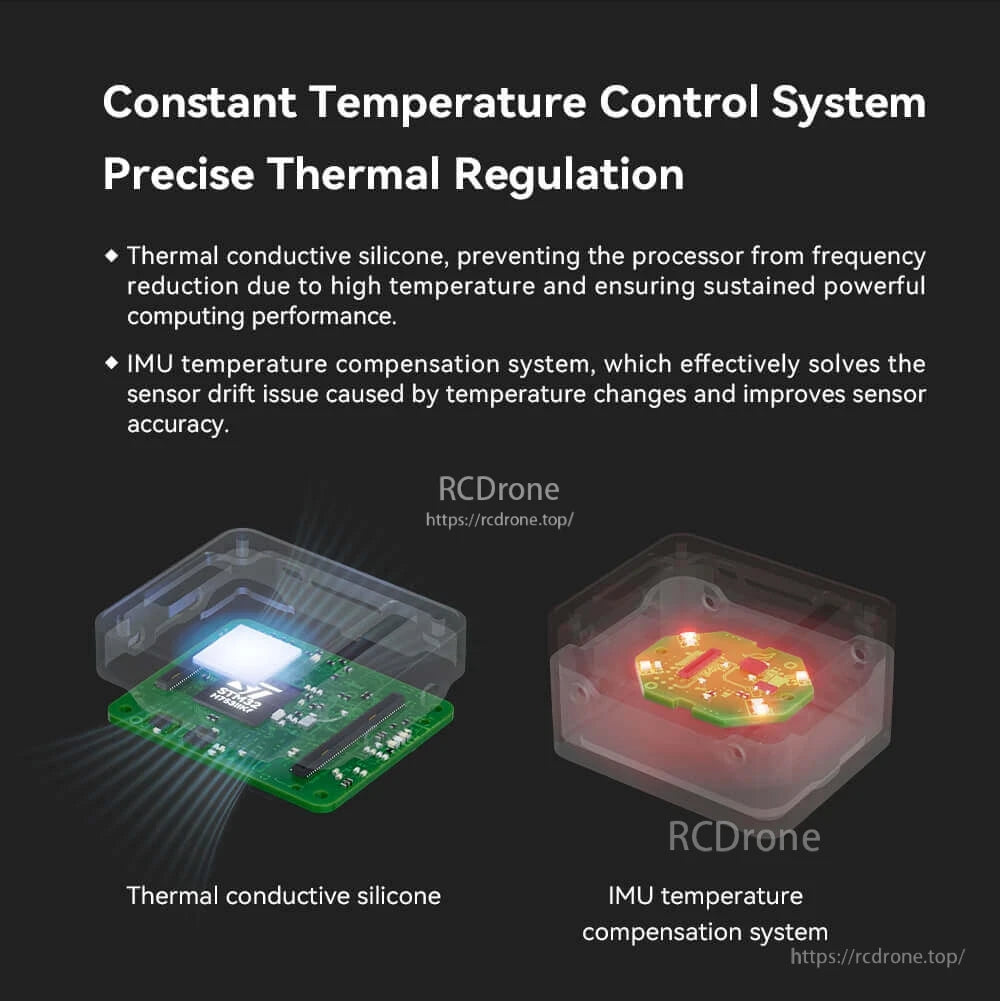
A constant temperature control system uses thermal conductive silicone and IMU temperature compensation to reduce temperature-related drift.
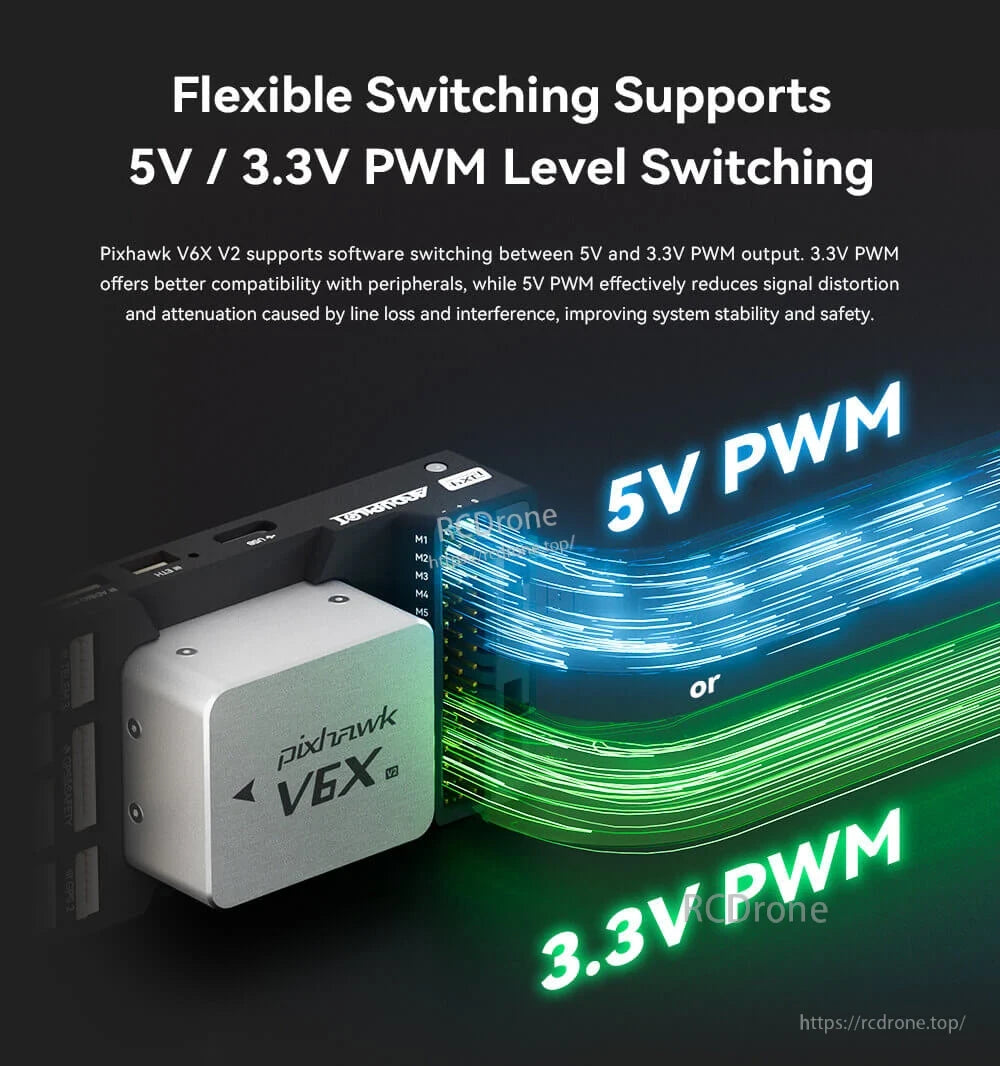
Pixhawk V6X V2 supports flexible switching between 5V and 3.3V PWM output levels for easier compatibility with different peripherals.

Pixhawk V6X V2 integrates a 100 Mbps Ethernet interface alongside labeled ports like USB, TELEM3, CAN, and GPS & Safety for clean wiring.
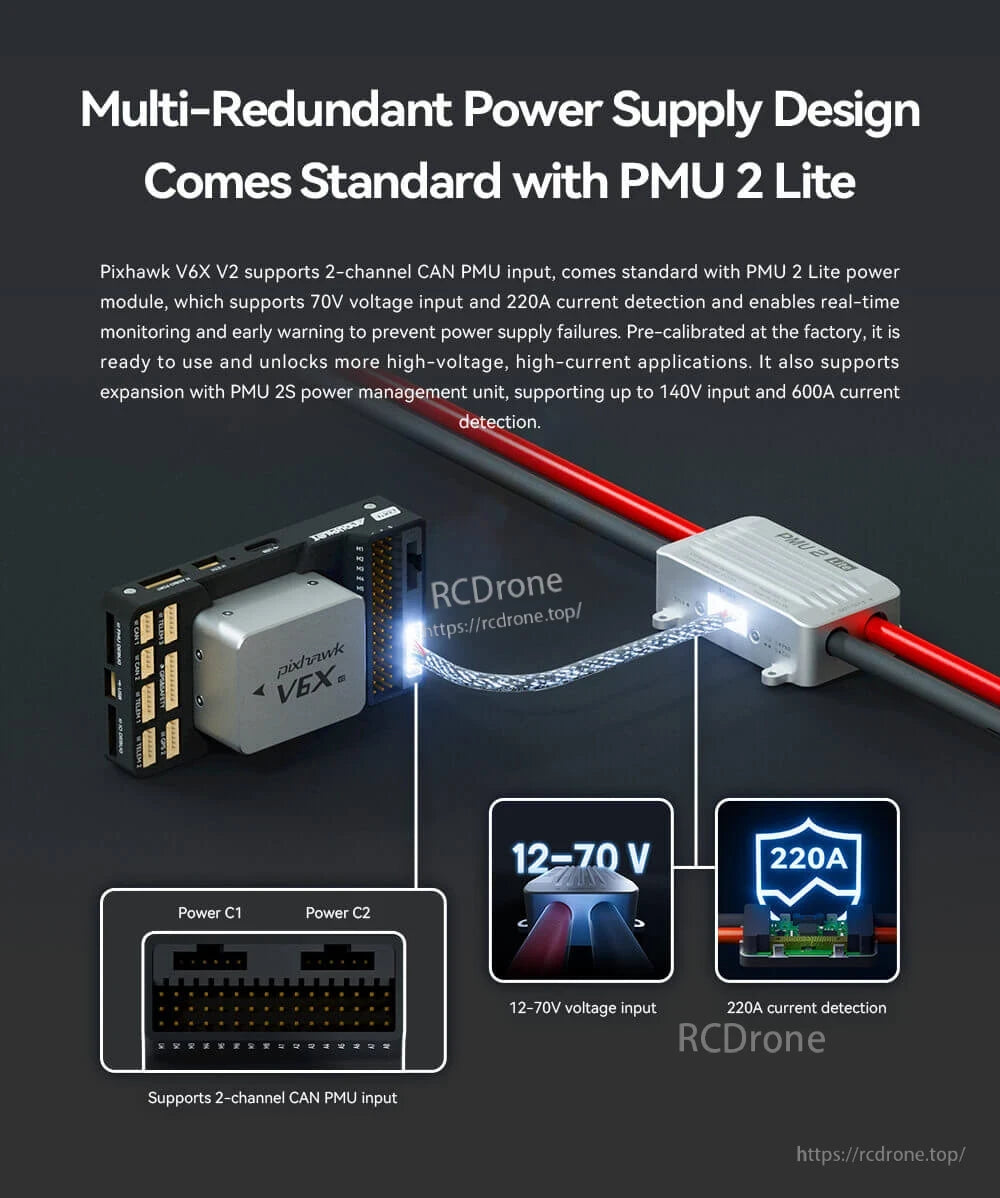
Pixhawk V6X V2 pairs with the PMU 2 Lite module for multi-redundant power input, supporting 12–70V and 220A current detection.

The CUAV Pixhawk V6X V2 uses a modular, detachable core module on a carrier board to simplify customization and connector access.
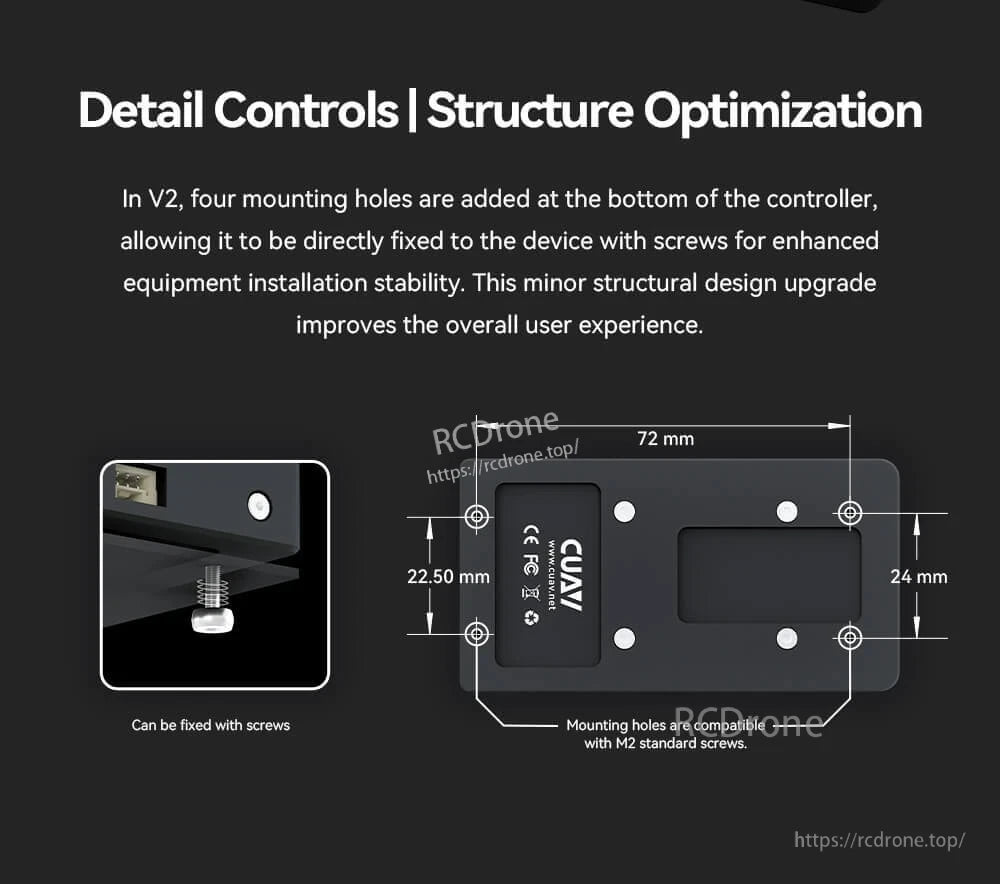
The CUAV Pixhawk V6X V2 adds four M2-compatible bottom mounting holes with a 72 mm footprint for more secure screw-in installation.

Pixhawk V6X V2 supports ArduPilot and PX4 firmware for a range of unmanned platforms including multirotors, fixed-wing aircraft, and ground or marine vehicles.
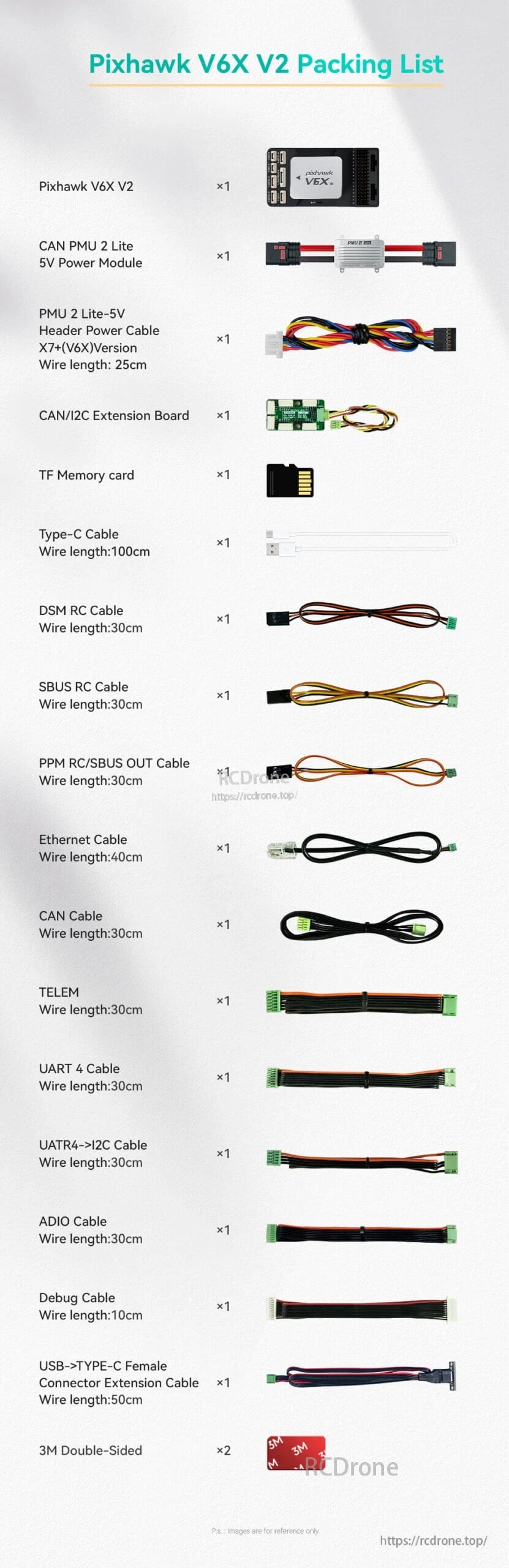
The Pixhawk V6X V2 kit includes the flight controller, CAN PMU 2 Lite 5V power module, TF memory card, and a set of Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO, and debug cables.
Related Collections


















