






CubeMars AK10-9 V2.0 Robotic Actuator KV60/KV100 | 18Nm/15Nm Rated Torque, Dual Encoder, MIT & Servo Modes Robot Motor
CubeMars AK10-9 V2.0 Robotic Actuator KV60/KV100 | 18Nm/15Nm Rated Torque, Dual Encoder, MIT & Servo Modes Robot Motor
CubeMars
Couldn't load pickup availability
Overview
The CubeMars AK10-9 V2.0 is a highly integrated robotic actuator that combines a high-performance BLDC motor, planetary reducer, dual encoders, and integrated driver into one compact unit. Supporting both MIT power mode and industrial servo control mode, it delivers smooth torque output, accurate positioning, and fast response, making it ideal for legged robots, exoskeletons, and AGVs. Available in KV60 and KV100 variants, it offers up to 48Nm peak torque, with optimized heat dissipation and real-time temperature monitoring for long-term reliability.
Key Features
-
Dual Control Modes: Supports seamless switching between MIT power mode and servo control mode for flexible motion control.
-
High Torque Output: Up to 48Nm peak torque with stable operation and low backlash (0.33°).
-
Highly Integrated: Combines motor, encoder, driver, and planetary reducer in one compact form.
-
Output & Inner Encoders: Integrated 14-bit inner and 15-bit outer magnetic encoders ensure accurate feedback.
-
Crossed Roller Bearings: Enhances axial and radial load resistance, improving reliability in dynamic applications.
-
Temperature Sensor Inside: Real-time temperature monitoring prevents motor damage under thermal stress.
-
Optimized Heat Dissipation: Unique structure design improves thermal management, ensuring stable long-term operation.
-
Quiet Operation: Noise level as low as 65 dB at 65cm (KV60 version).
Specifications
AK10-9 V2.0 K60 Specifications
| Application | Legged Robot,Exoskeleton,AGV | Peak torque (Nm) | 48 |
| Driving way | FOC | Peak current (ADC) | 29.8 |
| Operation ambient temperature | -20℃~50℃ | Kv (rpm/V) | 60 |
| Winding type | star | Kt (Nm/A) | 0.198 |
| Insulation class | C | Ke (V/krpm) | 17.2 |
| Insulation High-voltage | 1000V 5mA/2s | Phase to Phase resistance (mΩ) | 195 |
| Insulation resistance | 1000V 10MΩ | Phase to Phase inductance (μH) | 181 |
| Phase | 3 | Inertia (gcm²) | 1002 |
| Pole pairs | 21 | Km (Nm/√W) | 0.45 |
| Reduction ratio | 9:1 | Mechanical time constant (ms) | 0.5 |
| Back drive(Nm) | 0.8 | Electrical time constant (ms) | 0.93 |
| Backlash (°) | 0.33 | Weight (g) | 960 |
| Temperature sensor | NTC MF51B 103F3950 | Maximum torque weight ratio (Nm/kg) | 50 |
| Noise dB 65CM away the motor | 65 | CAN connector | A1257WR-S-4P |
| Basic load ratings (dyn. C ) N | 2000 | UART connector | A1257WR-S-3P |
| Basic load ratings (stat.C0) N | 2520 | Power connector | XT30PW-M |
| Rated voltage (V) | 24/48 | Inner loop encoder type | Magnetic encoder |
| Rated torque (Nm) | 18 | Inner ring encoder resolution | 14bit |
| Rated speed (rpm) | 109/228 | Outer ring encoder type | Magnetic encoder |
| Rated current (ADC) | 10.6 | Outer ring encoder resolution | 15bit |
AK10-9 V2.0 KV100 Specifications
| Application | Legged Robot,Exoskeleton,AGV | Peak torque (Nm) | 38 |
| Driving way | FOC | Peak current (ADC) | 41.2 |
| Operation ambient temperature | -20℃~50℃ | Kv (rpm/V) | 100 |
| Winding type | Delta | Kt (Nm/A) | 0.114 |
| Insulation class | C | Ke (V/krpm) | 9.9 |
| Insulation High-voltage | 1000V 5mA/2s | Phase to Phase resistance (mΩ) | 65.5 |
| Insulation resistance | 1000V10MΩ | Phase to Phase inductance (μH) | 60 |
| Phase | 3 | Inertia (gcm²) | 1002 |
| Pole pairs | 21 | Km (Nm/√W) | 0.45 |
| Reduction ratio | 9:1 | Mechanical time constant (ms) | 0.51 |
| Back drive(Nm) | 0.8 | Electrical time constant (ms) | 0.92 |
| Backlash (°) | 0.33 | Weight (g) | 960 |
| Temperature sensor | NTC MF51B 103F3950 | Maximum torque weight ratio (Nm/kg) | 39.6 |
| Noise dB 65CM away the motor | 70 | CAN connector | A1257WR-S-4P |
| Basic load ratings (dyn. C ) N | 2000 | UART connector | A1257WR-S-3P |
| Basic load ratings (stat.C0) N | 2520 | Power connector | XT30PW-M |
| Rated voltage (V) | 24/48 | Inner loop encoder type | Magnetic encoder |
| Rated torque (Nm) | 15 | Inner ring encoder resolution | 14bit |
| Rated speed (rpm) | 205/421 | Outer ring encoder type | Magnetic encoder |
| Rated current (ADC) | 16.2 | Outer ring encoder resolution | 15bit |
| Number of encoder | 2 |
Applications
-
Bionic Legged Robots
-
Exoskeletons for Rehabilitation or Load Bearing
-
Autonomous Ground Vehicles (AGV)
-
Joint Torque Control Systems
-
Humanoid and Quadruped Robotics
Downloads
![]() AK Series Driver and Control Manual v1.0.15.X.pdf
AK Series Driver and Control Manual v1.0.15.X.pdf
Details
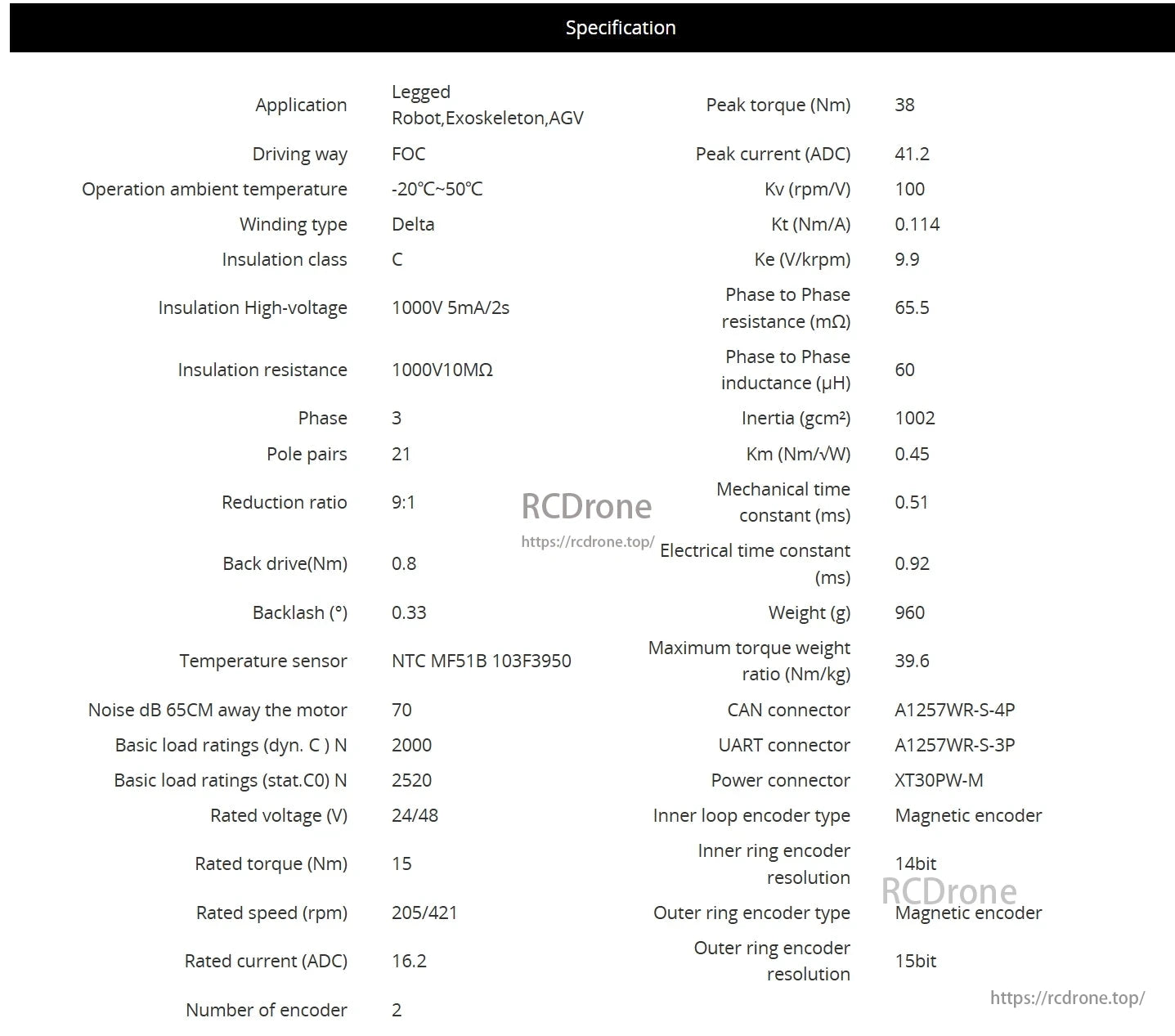
CubeMars AK10 Robotic Actuator: 38 Nm peak torque, 41.2 ADC peak current, -20°C to 50°C operation, 9:1 reduction ratio, 960g weight, 39.6 Nm/kg max torque-weight ratio, 70 dB noise, magnetic encoders, CAN and UART connectors.

CubeMars AK10 Robotic Actuator: 48 Nm peak torque, 29.8 A peak current, -20°C to 50°C operation, 1000V insulation, 3 phases, 21 pole pairs, 9:1 reduction ratio, 960g weight, 50 Nm/kg max torque weight ratio, magnetic encoders.

Analysis Chart for CubeMars AK10-9 V2.0 KV60@48VDC actuator. Displays output power (W), efficiency, current (A), and speed (RPM) against torque (N.m). Efficiency peaks around 12 N.m, while output power increases steadily with torque. Current rises linearly, and speed decreases as torque increases. The chart highlights the actuator's performance characteristics, demonstrating its capability under varying loads. Key metrics include maximum output power exceeding 800 W and operational speed up to 350 RPM at low torques. This data aids in understanding the actuator's efficiency and power dynamics across different applications.
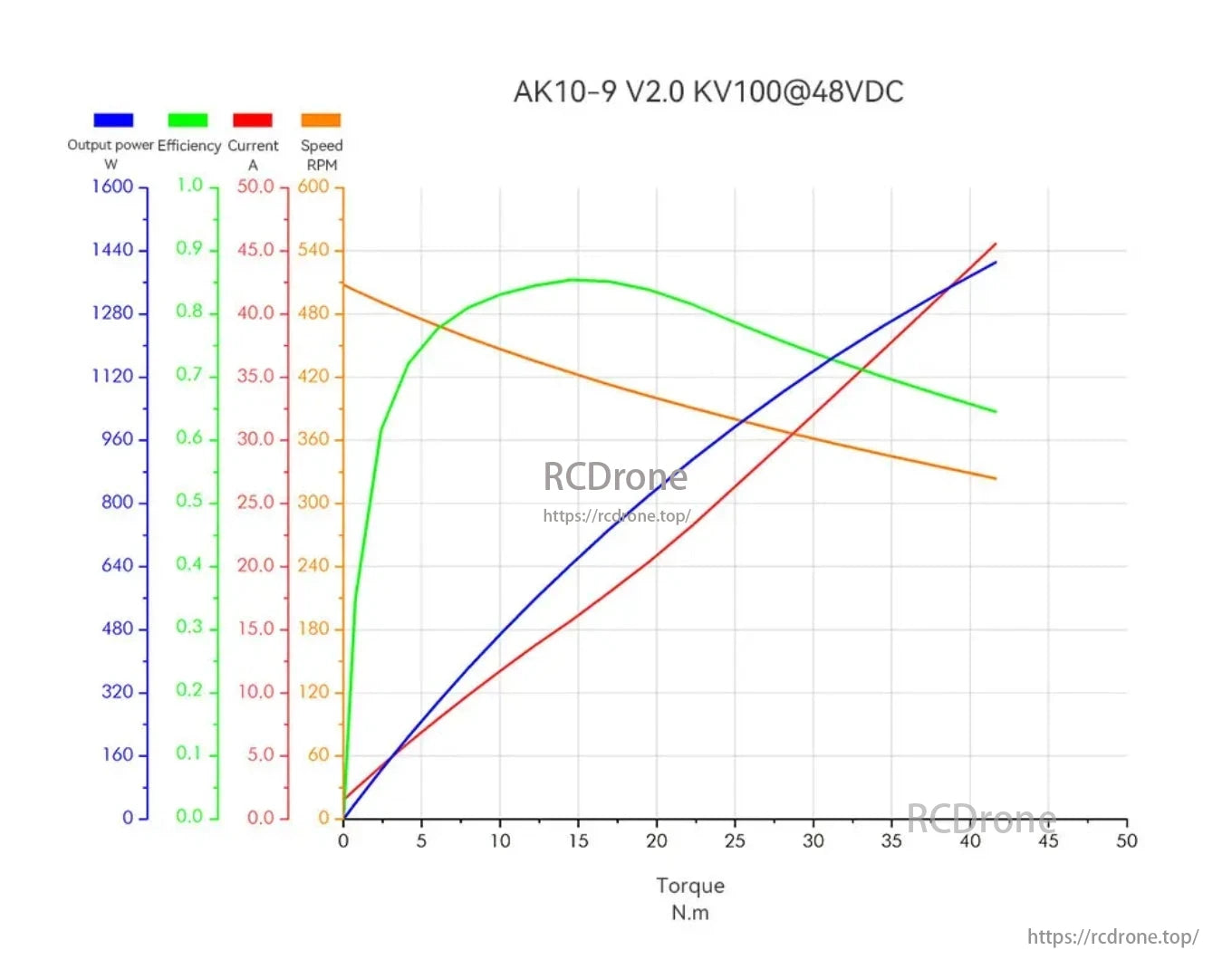
CubeMars AK10-9 V2.0 KV100@48VDC actuator performance is depicted. Output power (W), efficiency, current (A), and speed (RPM) are plotted against torque (N.m). Efficiency peaks around 15 N.m, while output power increases linearly with torque. Current also rises steadily with torque. Speed decreases as torque increases, starting at approximately 480 RPM at zero torque. The graph illustrates optimal operation points for various applications, highlighting the actuator's capabilities under different load conditions. This data aids in selecting appropriate settings for specific tasks.

CubeMars AK10-9 KV60 integrated power servo, modes included. Robotic actuator with FCC, CE, RoHS V2.0 certification.

Robotic Actuator offers efficient motor control, accurate power mode, and faster response for industrial applications.

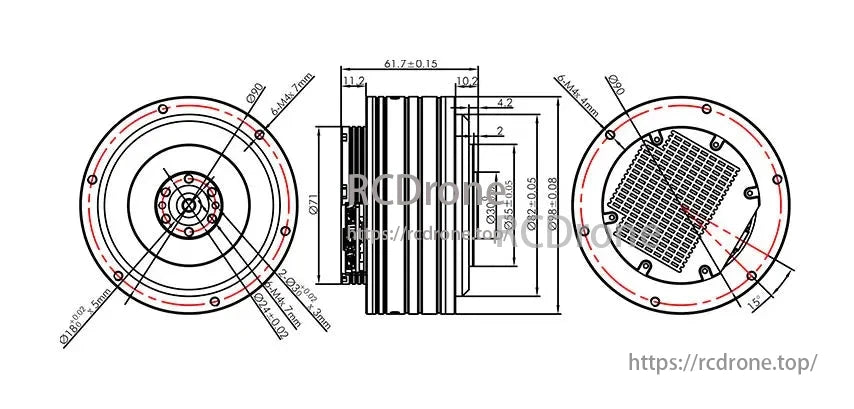
CubeMars AK10 Robotic Actuator includes a high-performance BLDC motor, industrial-grade crossed roller bearing, temperature sensor, output encoder, dual control mode, and planetary reducer for stable torque.

Optimize structure and heat radiation quickly. Enhance motor shell heat dissipation for longevity and drive module performance stability. SN: 1010921081.
Related Collections






