





CubeMars AK80-64 KV80 Robotic Actuator – 120Nm Peak Torque, 64:1 Gear Ratio, MIT Mode Robot Motor
CubeMars AK80-64 KV80 Robotic Actuator – 120Nm Peak Torque, 64:1 Gear Ratio, MIT Mode Robot Motor
CubeMars
Couldn't load pickup availability
Overview
The CubeMars AK80-64 KV80 Robotic Actuator is a highly integrated power unit designed for legged robots, exoskeletons, and AGVs. Featuring a powerful 48Nm rated torque and 120Nm peak torque, this actuator combines a brushless DC motor, self-developed 64:1 planetary gearbox, 14-bit magnetic encoder, and integrated FOC drive in a compact form. Supporting 6–12S voltage, MIT and servo control modes, and PID auto-tuning, the AK80-64 enables precise and efficient motion control under high-load applications.
Key Features
-
High Torque Output: 48Nm rated, 120Nm peak torque
-
Integrated Drive & Encoder: Simplifies system design
-
64:1 Planetary Gearbox: High reduction for powerful output
-
MIT Control Mode: Smooth position, velocity, and acceleration control
-
Wide Voltage Support: Compatible with 24V or 48V systems (6–12S LiPo)
-
Compact & Lightweight: Only 850g, high torque-to-weight ratio
-
Communication: CAN & UART with XT30PW-M power connector
-
Low Noise: ≤60 dB @ 65cm distance
Specifications
| Application | Legged Robot,Exoskeleton,AGV | Peak torque (Nm) | 120 |
| Driving way | FOC | Peak current (ADC) | 19 |
| Operation ambient temperature | -20℃~50℃ | Kv (rpm/V) | 80 |
| Winding type | Delta | Kt (Nm/A) | 0.136 |
| Insulation class | H | Ke (V/krpm) | 13.7 |
| Insulation High-voltage | 1000V 5mA/2s | Phase to Phase resistance (mΩ) | 220 |
| Insulation resistance | 1000V10MΩ | Phase to Phase inductance (μH) | 133.5 |
| Phase | Three Phase | Inertia (gcm²) | 564.5 |
| Pole pairs | 21 | Km (Nm/√W) | 0.29 |
| Reduction ratio | 64:1 | Mechanical time constant (ms) | 0.67 |
| Back drive(Nm) | 4.7 | Electrical time constant (ms) | 0.61 |
| Backlash (°) | 0.18 | Weight (g) | 850 |
| Temperature sensor | NTC MF51B 103F3950 | Maximum torque weight ratio (Nm/kg) | 141.2 |
| Noise dB 65CM away the motor | 60 | CAN connector | A1257WR-S-4P |
| Basic load ratings (dyn. C ) N | 2000 | UART connector | A1257WR-S-3P |
| Basic load ratings (stat.C0) N | 2520 | Power connector | XT30PW-M |
| Rated voltage (V) | 24/48 | Inner loop encoder type | Magnetic encoder |
| Rated torque (Nm) | 48 | Inner ring encoder resolution | 14bit |
| Rated speed (rpm) | 23/48 | Outer ring encoder type | - |
| Rated current (ADC) | 7 | Outer ring encoder resolution | - |
| Number of encoder | 1 |
Applications
-
Legged Robots: Humanoid and quadruped locomotion
-
Exoskeletons: Assistive and rehabilitation robotics
-
AGVs: Precision motor control in automated guided vehicles
-
Robotic Arms: Industrial and collaborative applications requiring high torque and precision
Details
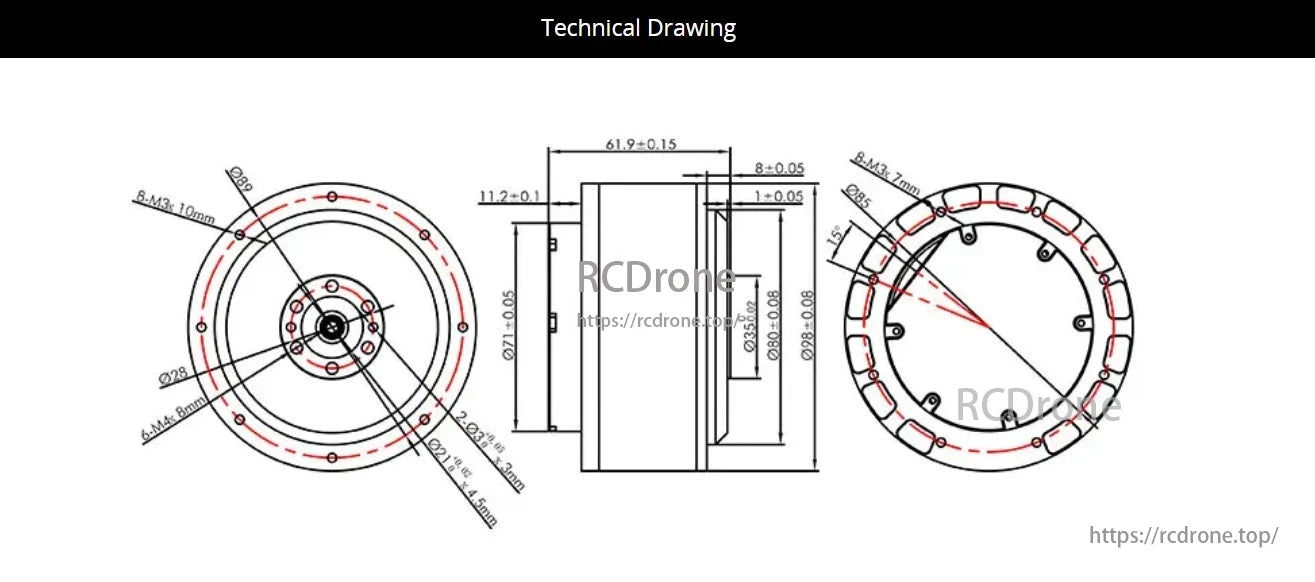
Technical drawing of CubeMars AK80 Robot with dimensions and specifications.
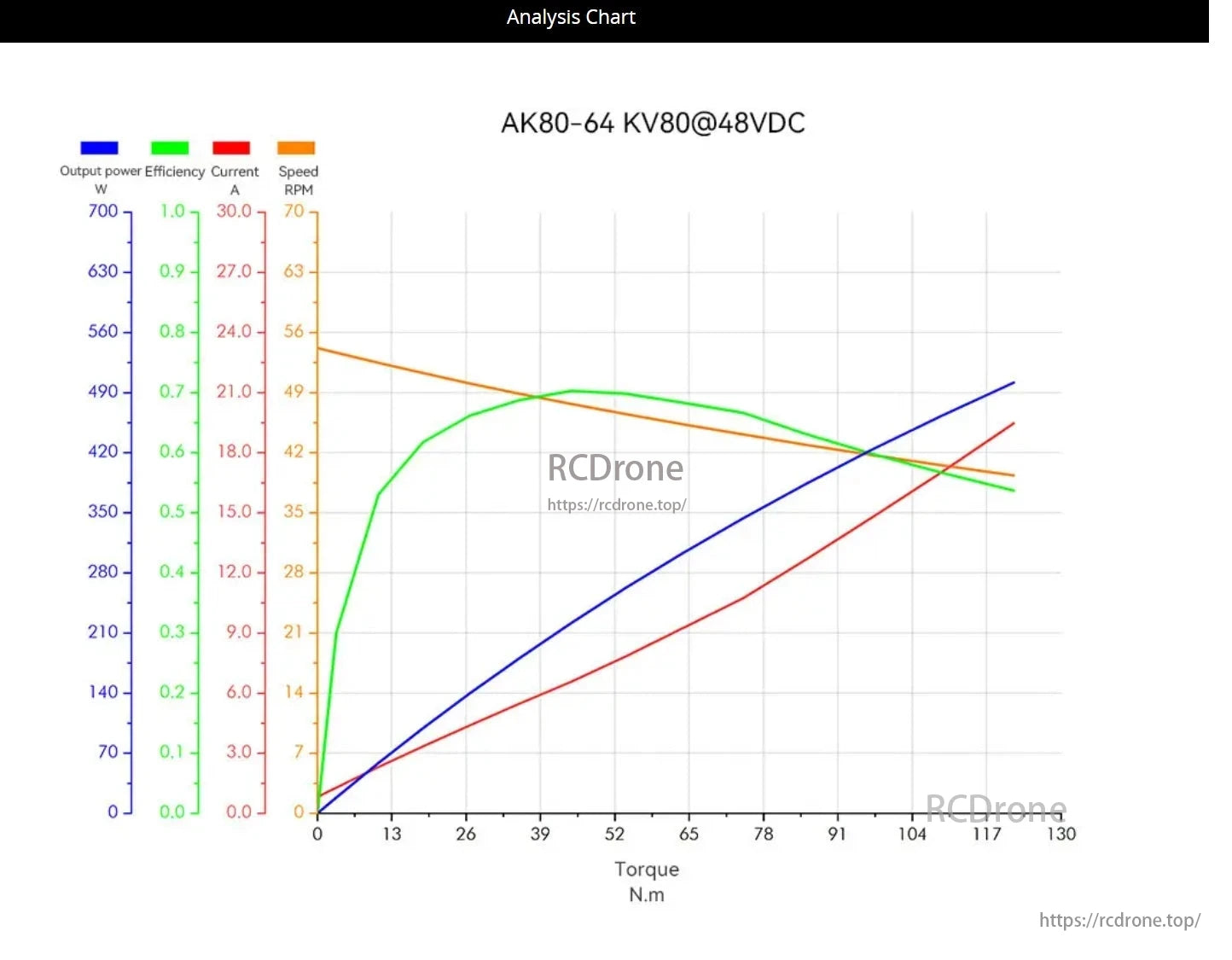
Analysis Chart for CubeMars AK80-64 KV80@48VDC. Displays output power efficiency, current, and speed against torque in N.m. Efficiency peaks at 0.7 near 52 N.m. Current increases linearly with torque. Speed decreases as torque rises, starting at 56 RPM. Output power grows steadily with torque. Graph uses blue, green, red, and orange lines for clarity, with axes labeled in watts, amps, RPM, and N.m. Data illustrates motor performance characteristics under varying loads.

CubeMars AK80-64KV80: Two-in-one, high-integrated dynamic module for robotics.

AK80-64KV80 motor: high integration, ultra-light, efficient, dynamic design.

Low noise operation, strong power. Lower cogging torque, smooth running, high resolution, high precision control with 0.1°.
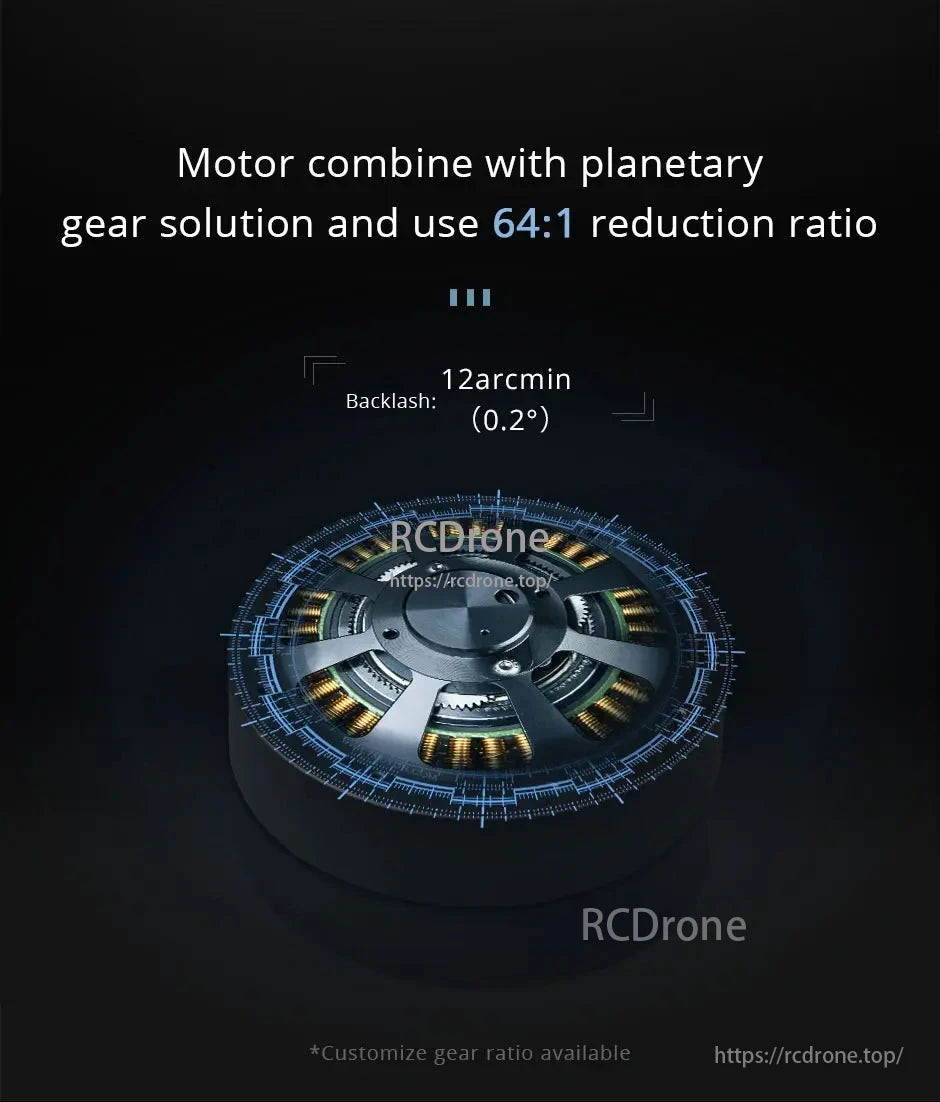
Motor with planetary gear, 64:1 ratio, 12arcmin backlash.
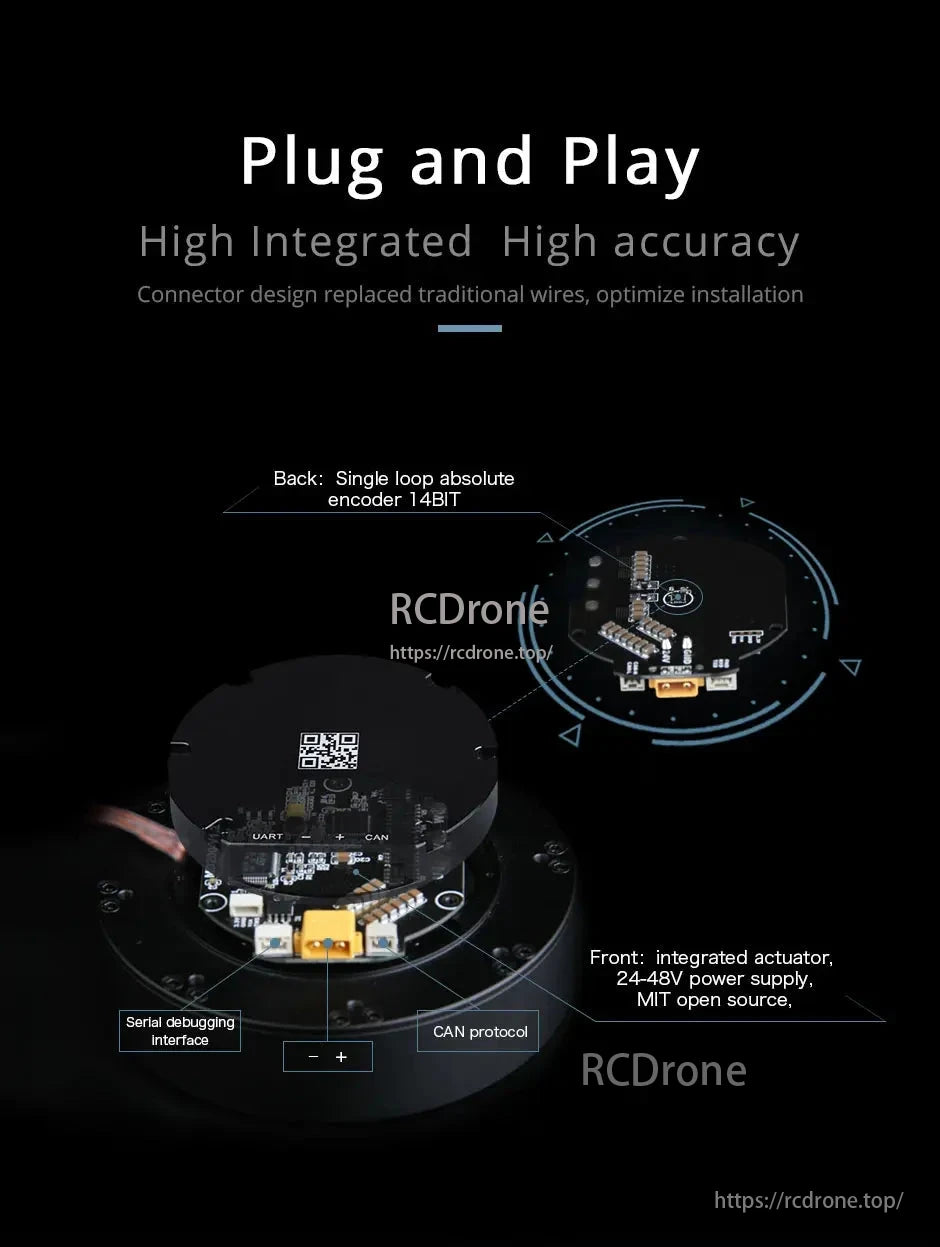
Plug-and-play, high-integrated, accurate robot module with single-loop encoder, integrated actuator, 24-48V power, CAN protocol, and serial debugging.

Related Collections





