





CubeMars R80 KV110 Motor 48V 3-Phase FOC w/ Hall Sensors, Exoskeleton & Robotics Drive
CubeMars R80 KV110 Motor 48V 3-Phase FOC w/ Hall Sensors, Exoskeleton & Robotics Drive
CubeMars
Couldn't load pickup availability
Overview
CubeMars R80 KV110 Motor is a 3-phase motor intended for exoskeleton and robotics drive applications, with integrated Hall sensors and support for FOC (field-oriented control). It features a special heat dissipation design and a connector-style interface to simplify installation.
Key Features
- Integrated Hall sensors
- Electrical angle accuracy deviation: ±10°
- Special heat dissipation design (ultra-thin base & high thermal conductivity silicone pad; reduced overall length to improve heat dissipation)
- Pattern hole design on bell for gearbox installation (harmonic gearbox, flange, or other gearbox types)
- Connector design for easier installation (replaces traditional wires)
- Analytical motor operation graph provided (speed vs torque at 48V; non-operating / short term operation / continuous operation zones)
Specifications
| Application | Exoskeleton |
| Driving way | FOC |
| Operation ambient temperature | -20℃~50℃ |
| Winding type | delta |
| Insulation class | H |
| Insulation High-voltage | 1000V 5mA/2s |
| Insulation resistance | 1000V10MΩ |
| Phase | 3 |
| Pole pairs | 21 |
| Rated voltage (V) | 48 |
| No-load speed (rpm) | 4320 |
| Rated torque (Nm) | 1.3 |
| Rated speed (rpm) | 3580 |
| Rated current (ADC) | 12.3 |
| Peak torque (Nm) | 4 |
| Peak current (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Phase to Phase resistance (mΩ) | 125 |
| Phase to Phase inductance (μH) | 87 |
| Inertia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Mechanical time constant (ms) | 0.83 |
| Electrical time constant(ms) | 0.70 |
| Weight (g) | 354 |
| Maximum torque weight ratio (Nm/kg) | 11.3 |
| Motor Phase U V W | Reference engineering drawing |
| Hall sensor port | VCC, GND, Hu, Hv, HW (reference engineering drawing) |
| Correspondence | Hu-U; Hv-V; Hw-W |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Manuals / Documents
For wiring/driver selection questions or documentation help, contact support via https://rcdrone.top/ or email [email protected].
Note from provided chart: All data is for information purposes only | Subject to change without notice.
Details

CubeMars R80 KV110 is built for compact robotics joints and exoskeleton drives, with a low-profile actuator-style form factor.

Integrated Hall sensors provide rotor position feedback for stable FOC control, with electrical angle accuracy deviation rated at ±10°.

A special heat dissipation design uses an ultra-thin base and high-thermal-conductivity silicone pad to help manage temperature in compact builds.

Pattern mounting holes on the bell simplify attaching a harmonic gearbox, flange, or other gearbox types.
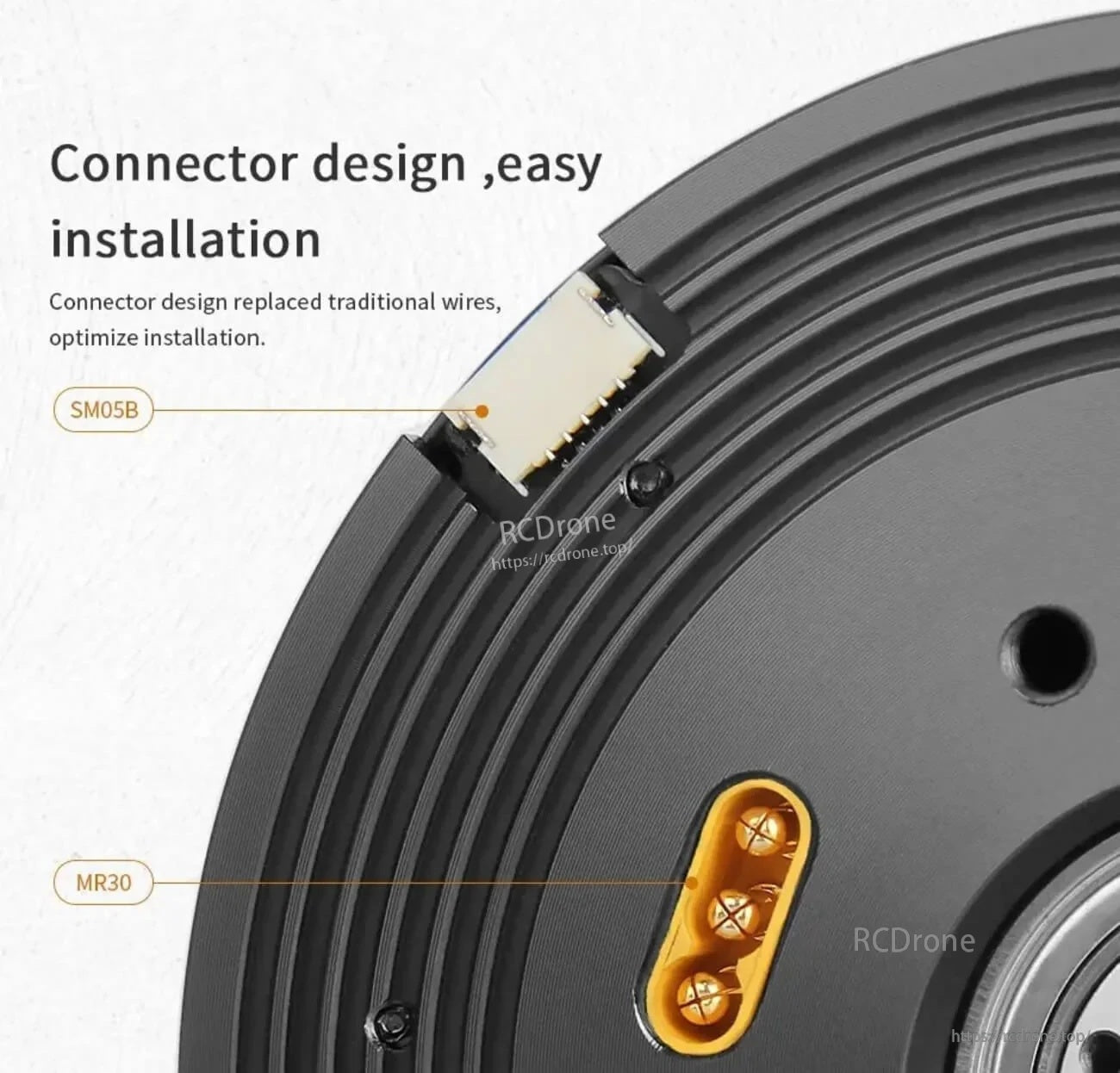
Connector-style wiring replaces traditional loose leads for cleaner, faster installation of power and sensor connections.
Optimized electromagnetic design targets low cogging torque and low rotor inertia for smoother motion control.

Designed for heavy-load legged robots and other high-torque joint applications where stable output matters.

The 48V speed‑vs‑torque operating chart helps choose a safe continuous range and understand short‑term peak capability.
Related Collections





