




CubeMars RI60 KV120 Frameless Inrunner Torque Motor | 0.57Nm, 120KV, 48V BLDC for Cobot & Exoskeleton
CubeMars RI60 KV120 Frameless Inrunner Torque Motor | 0.57Nm, 120KV, 48V BLDC for Cobot & Exoskeleton
CubeMars
Couldn't load pickup availability
Overview
The CubeMars RI60 KV120 Frameless Inrunner Torque Motor is designed for compact, high-performance robotic applications. Supporting 24V/36V/48V operating voltages, this frameless BLDC motor delivers high torque density, smooth low-cogging motion, and precise 0.01° control resolution. With a compact outer diameter of Φ60mm and weight of just 155.9g, it's ideal for cobot arms, exoskeletons, and robotic joints with tight space constraints.
This motor features a hand-wound stator for optimal copper fill factor, curved permanent magnets for efficient sinusoidal BEMF response, and options for hall sensor and encoder integration. It supports Field-Oriented Control (FOC), operates reliably from -20°C to 50°C, and withstands up to 1.63 Nm peak torque. The heightened rotor version enhances hall sensor accuracy by increasing detection range by 2mm.
Key Features
-
Frameless Inrunner BLDC Design – No outer housing, ideal for embedded installations
-
High Torque Density – Max torque-to-weight ratio of 10.46 Nm/kg
-
Precision Control – Compatible with high-resolution encoders, supports 0.01° positioning
-
Low Cogging Torque – Smooth operation, reduced vibration, and noise
-
Temperature Tolerant – Operates in ambient temps from -20°C to 50°C
-
Multiple Control Interfaces – Supports encoder and hall sensor feedback
-
Hand-Wound Stator – Excellent copper fill, 0.5mm edge clearance for easy assembly
-
Optional Rotor Version – +2mm rotor height improves hall sensor alignment
Technical Specifications
Application & Configuration
| Parameter | Value |
|---|---|
| Application | Cobot Arm / Exoskeleton |
| Driving Way | FOC |
| Phase | 3 Phase |
| Winding Type | Delta |
| Pole Pairs | 14 |
| Insulation Class | C |
| Insulation Voltage | 500V 5mA/2s |
| Insulation Resistance | 500V 10MΩ |
| Operating Temp. | -20℃ ~ 50℃ |
Electrical Characteristics
| Parameter | Value |
|---|---|
| Rated Voltage (V) | 24 / 36 / 48 |
| No-Load Speed (rpm) | 2532 / 3798 / 5064 |
| Rated Speed (rpm) | 1440 / 2320 / 3190 |
| Rated Torque (Nm) | 0.57 |
| Peak Torque (Nm) | 1.63 |
| Rated Current (ADC) | 5.6 |
| Peak Current (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Phase Resistance (mΩ) | 900 |
| Phase Inductance (μH) | 877.5 |
| Inertia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Mech. Time Const. (ms) | 0.3 |
| Elec. Time Const. (ms) | 0.98 |
| Weight (g) | 155.9 |
| Torque/Weight Ratio | 10.46 Nm/kg |
Encoder & Hall Sensor Options
-
With Hall Sensor: Improved rotor sensing, recommended for high-accuracy position detection
-
Without Hall Sensor: Compact design for constrained environments
-
Supported Encoders: Renishaw, Sick, other high-precision encoders (0.01° resolution)
Mechanical Dimensions
| Version | Outer Diameter | Inner Diameter | Rotor Height | Max Thickness |
|---|---|---|---|---|
| Without Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (max) |
| With Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (max) |
Refer to technical drawings for exact tolerances and mounting hole patterns.
Performance Curve
Tested at 24VDC:
-
Max efficiency at ~0.3 Nm
-
Peak output power >125W at ~1.1 Nm
-
Max speed ~2500 RPM
-
Stable current response across torque range
Wiring & Connector Information
| Wire | Color + Size |
|---|---|
| U | Black + 18# Silicone |
| V | Yellow + 18# Silicone |
| W | Red + 18# Silicone |
| Hu | Blue + 30# Silicone |
| Hv | Green + 30# Silicone |
| Hw | Yellow + 30# Silicone |
| VCC | Red + 30# Silicone |
| GND | Black + 30# Silicone |
Wiring Map:
Hu-U, Hv-V, Hw-W
Manual Downloads
![]() RI60 without hall sensor-3D.zip
RI60 without hall sensor-3D.zip
Applications
-
Collaborative robotic arms
-
Exoskeleton joints
-
Legged robots and quadrupeds
-
Precision medical robotics
-
Embedded servo modules
Details
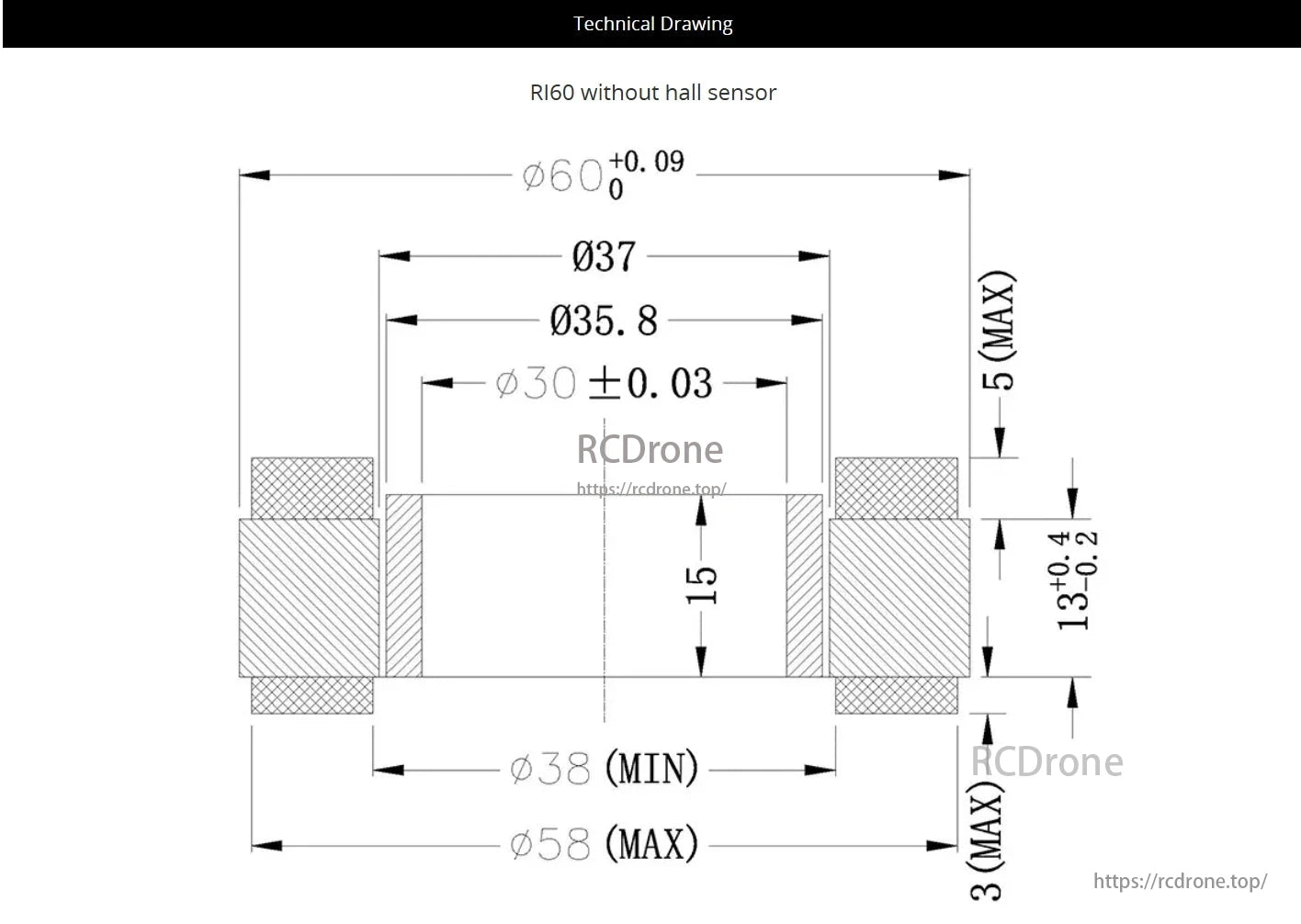
CubeMars RI60 Motor dimensions: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), 15 length, 5 max height, 13 ±0.4 width.
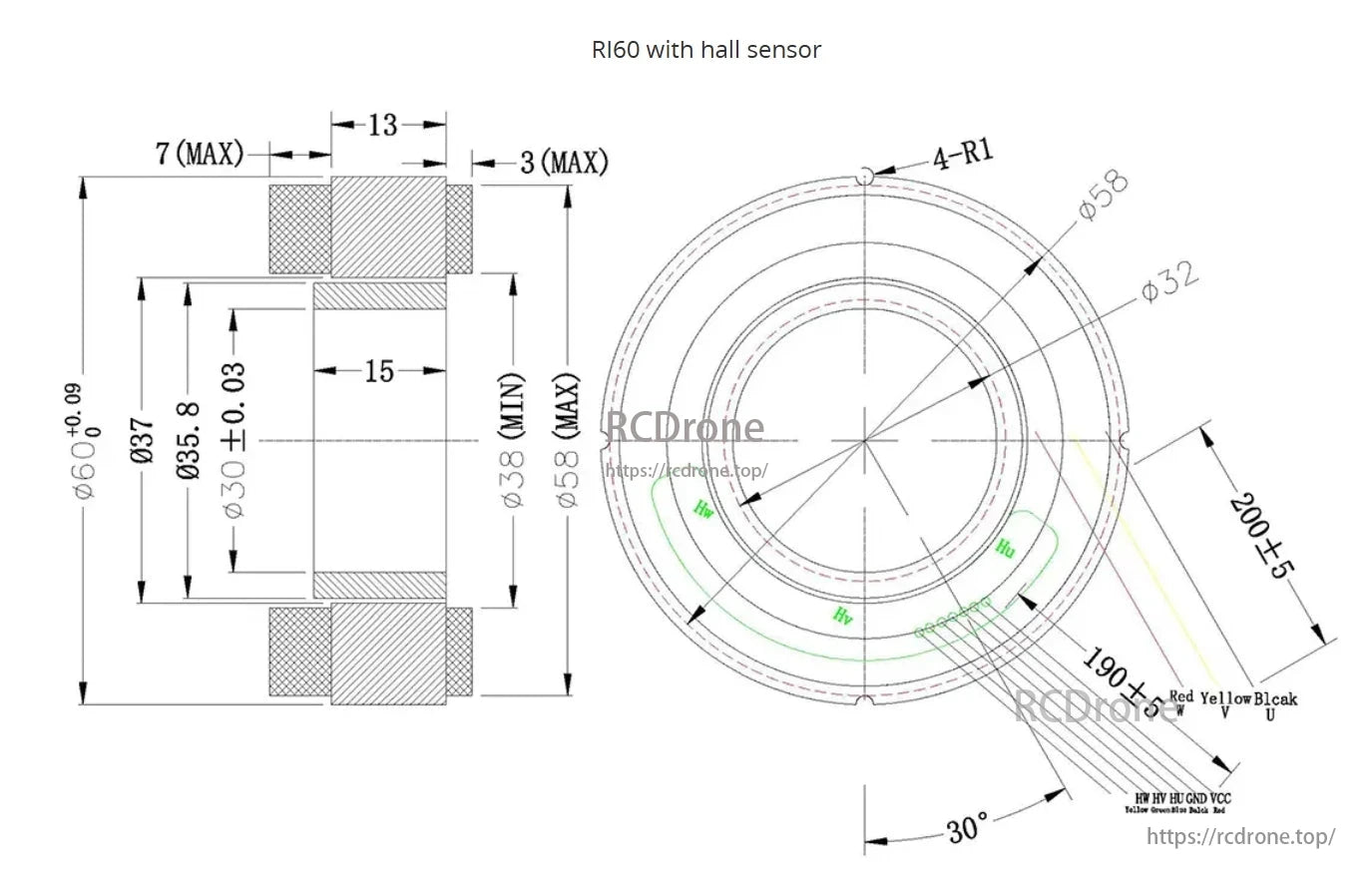
CubeMars RI60 Motor with hall sensor. Dimensions: 60mm diameter, 200mm length. Features 4-R1, φ58, φ32, and 30° angle markings. Includes HW, HV, HU labels.
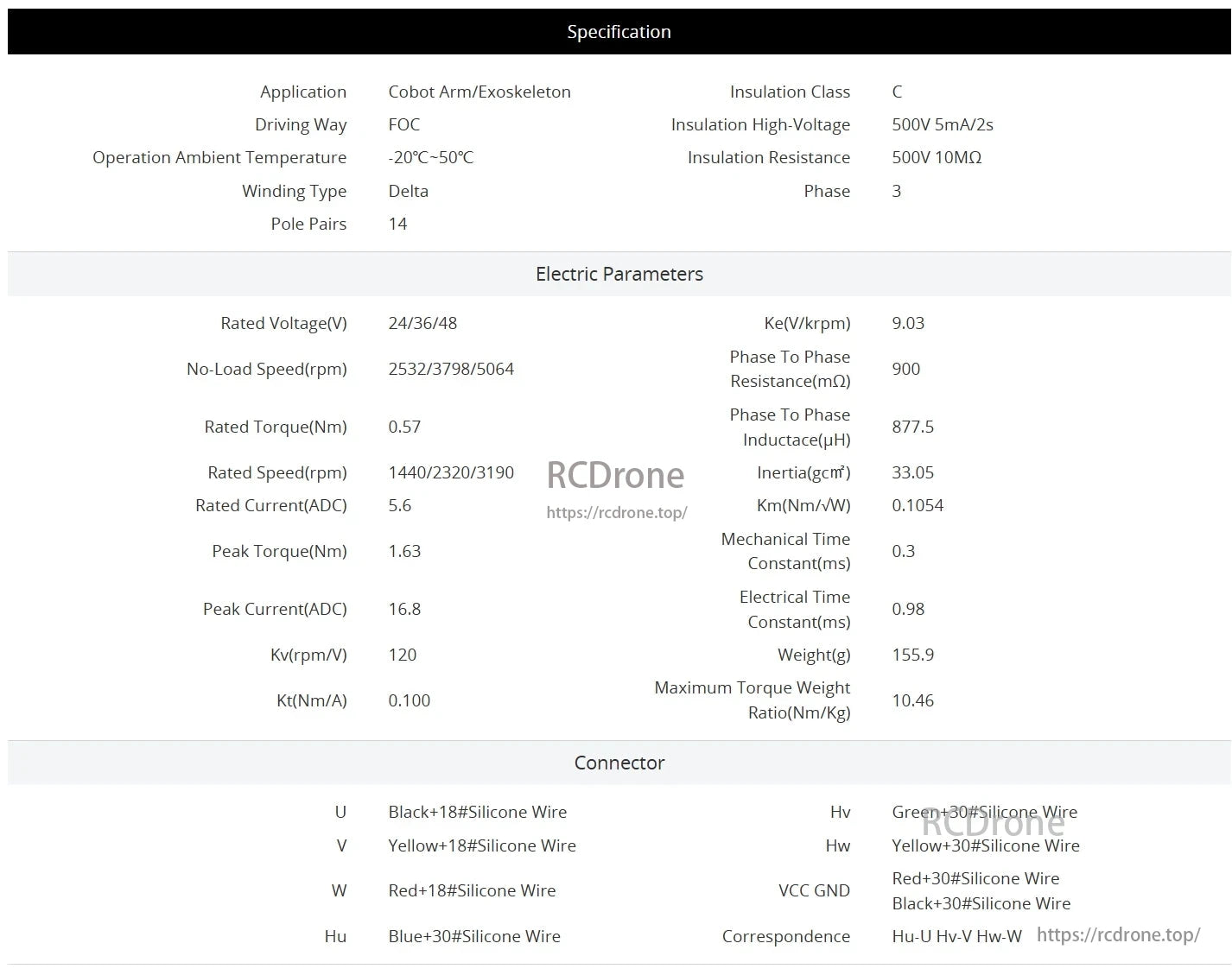
CubeMars RI60 Motor: Cobot arm/exoskeleton application, FOC driving, -20°C-50°C operation, 14 pole pairs. Rated voltage 24/36/48V, no-load speed 2532/3798/5064rpm, rated torque 0.57Nm, peak torque 1.63Nm.
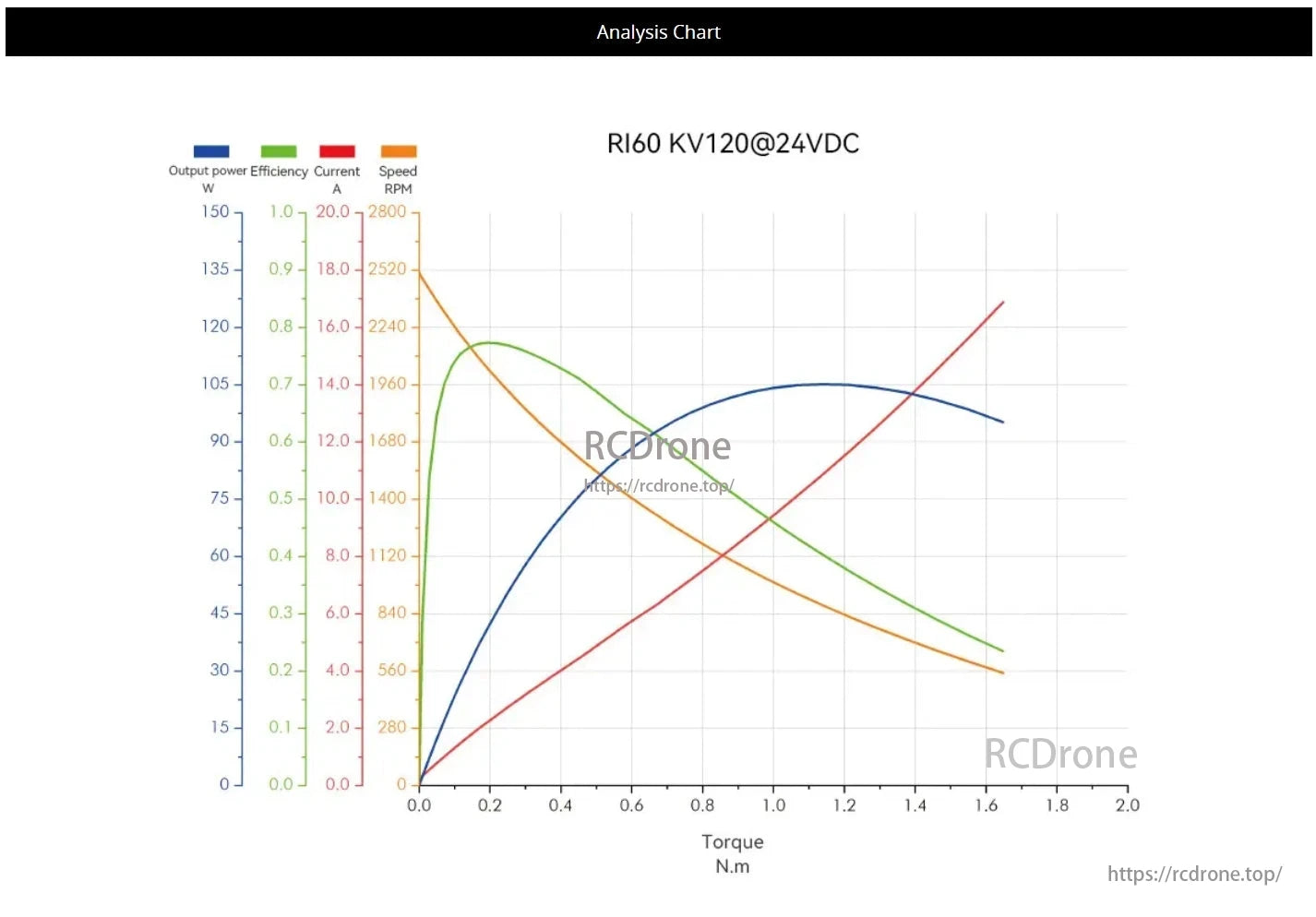
CubeMars RI60 motor analysis chart at KV120@24VDC. Displays output power, efficiency, current, and speed against torque. Efficiency peaks near 0.2 N.m, with speed decreasing as torque increases.
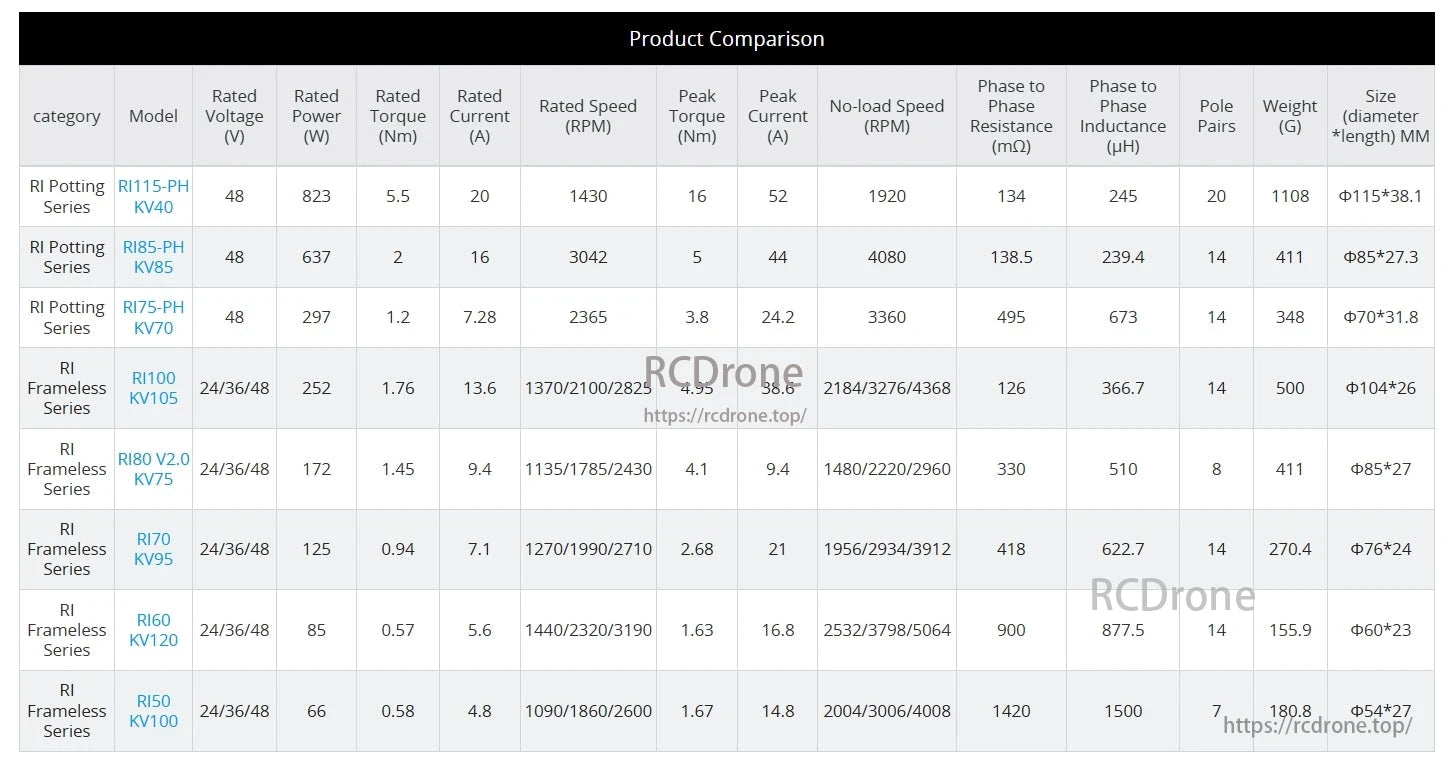
CubeMars RI60 KV120 motor: 24/36/48V, 85W, 0.57Nm torque, 5.6A current, 1440/2320/3190 RPM speed, 1.63Nm peak torque, 16.8A peak current, 900mΩ resistance, 877.5µH inductance, 14 pole pairs, 155.9g weight, φ60*23mm size.

CubeMars RI60 Motor: Lower cogging torque, smooth running, low noise, strong dynamic.

Hand-wound stator with 0.5mm clearance for optimal performance.

Curved permanent magnet for BEMF Sinus motor design, ensuring easy control.

RI60 Rotor Heightened Version. Overall height increased by 2mm for better hall sensor sensing.
CubeMars RI60 Motor: -40°C to 85°C, high-resolution encoder options.
Related Collections




