Holybro Pixhawk 6X (ICM-45686) Flight Controller – Triple Redundant IMU, STM32H753, Ethernet, PX4 & ArduPilot Compatible
Holybro Pixhawk 6X (ICM-45686) Flight Controller – Triple Redundant IMU, STM32H753, Ethernet, PX4 & ArduPilot Compatible
HolyBro
Couldn't load pickup availability
Overview
The Holybro Pixhawk 6X (ICM-45686) is a high-performance, modular autopilot flight controller designed for demanding industrial and commercial drone applications. Featuring triple-redundant ICM-45686 IMUs with BalancedGyro™ technology, dual barometers, and an STM32H753 processor running at 480 MHz, the Pixhawk 6X delivers unmatched reliability, real-time performance, and flexibility. Its modular architecture, advanced vibration isolation, and Ethernet interface make it ideal for UAV systems requiring robust control, precision, and mission adaptability.
Key Features
-
Triple IMU Redundancy: 3x ICM-45686 IMUs (±32g) with BalancedGyro™ technology for fault-tolerant inertial navigation
-
Dual Barometers: ICP20100 and BMP388 for enhanced altitude accuracy
-
High-Speed Processor: STM32H753 Cortex-M7, 480MHz, with 2MB Flash & 1MB RAM
-
Modular Design: Separates FMU, IMU, and baseboard, connected via 100-pin & 50-pin Pixhawk® Bus
-
Temperature-Controlled IMU Board: Ensures optimal sensor performance across temperature ranges
-
Ethernet Integration: Supports high-speed communication with mission computers
-
Digital Power Module Support: Delivers more accurate voltage and current measurements
-
Advanced Isolation System: Durable, custom-formulated material provides high-spectrum vibration damping
-
Firmware Compatibility: Ships with PX4 (v1.14.3+), supports ArduPilot (v4.5.0+)
Specifications
Processors & Sensors
| Component | Details |
|---|---|
| FMU Processor | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO Processor | STM32F103, ARM Cortex-M3, 72MHz |
| IMU Sensors | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Secure Element | NXP SE050 Plug & Trust |
Electrical Parameters
| Parameter | Value |
|---|---|
| Max Input Voltage | 6V |
| USB Power Input | 4.75~5.25V |
| Servo Rail Voltage | 0~36V |
| Telem1 & GPS2 Current Limit | 1.5A combined |
| Other Ports Current Limit | 1.5A combined |
| PWM Signal Voltage | Default 3.3V (switchable to 5V via resistor) |
| Operating Temperature | -25°C to +85°C |
Mechanical Dimensions & Weight
| Component | Dimensions (mm) | Weight (g) |
|---|---|---|
| Flight Controller | 38.8 x 31.8 x 16.8 | 31.3g |
| Standard Baseboard | 52.4 x 102 x 16.7 | 72.5g |
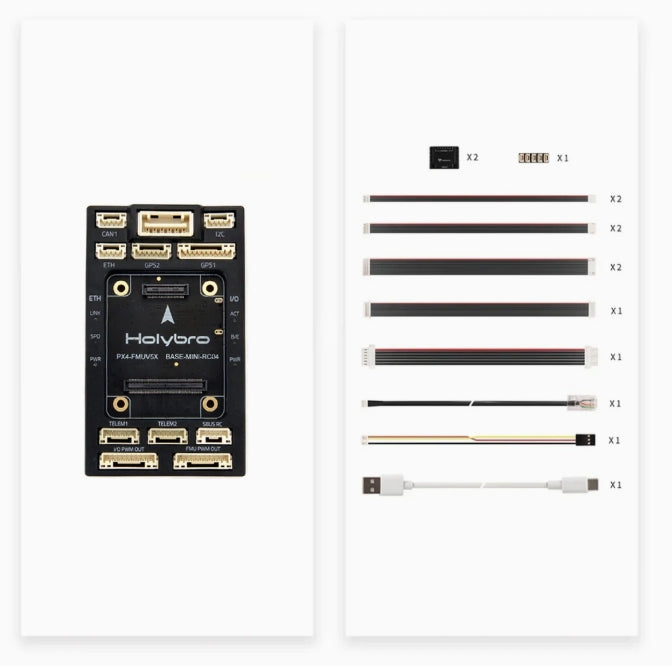
| Mini Baseboard | 43.4 x 72.8 x 14.2 | 26.5g |
Firmware Compatibility
-
PX4: Fully supported from version 1.14.3 and above
-
ArduPilot: Fully supported from version 4.5.0 and above
-
Firmware flashing supported via Mission Planner or QGroundControl
Applications
Ideal for integration into:
-
Industrial drones
-
Commercial UAV systems
-
VTOL aircraft
-
Academic research platforms
-
Multi-sensor and high-reliability missions
Details

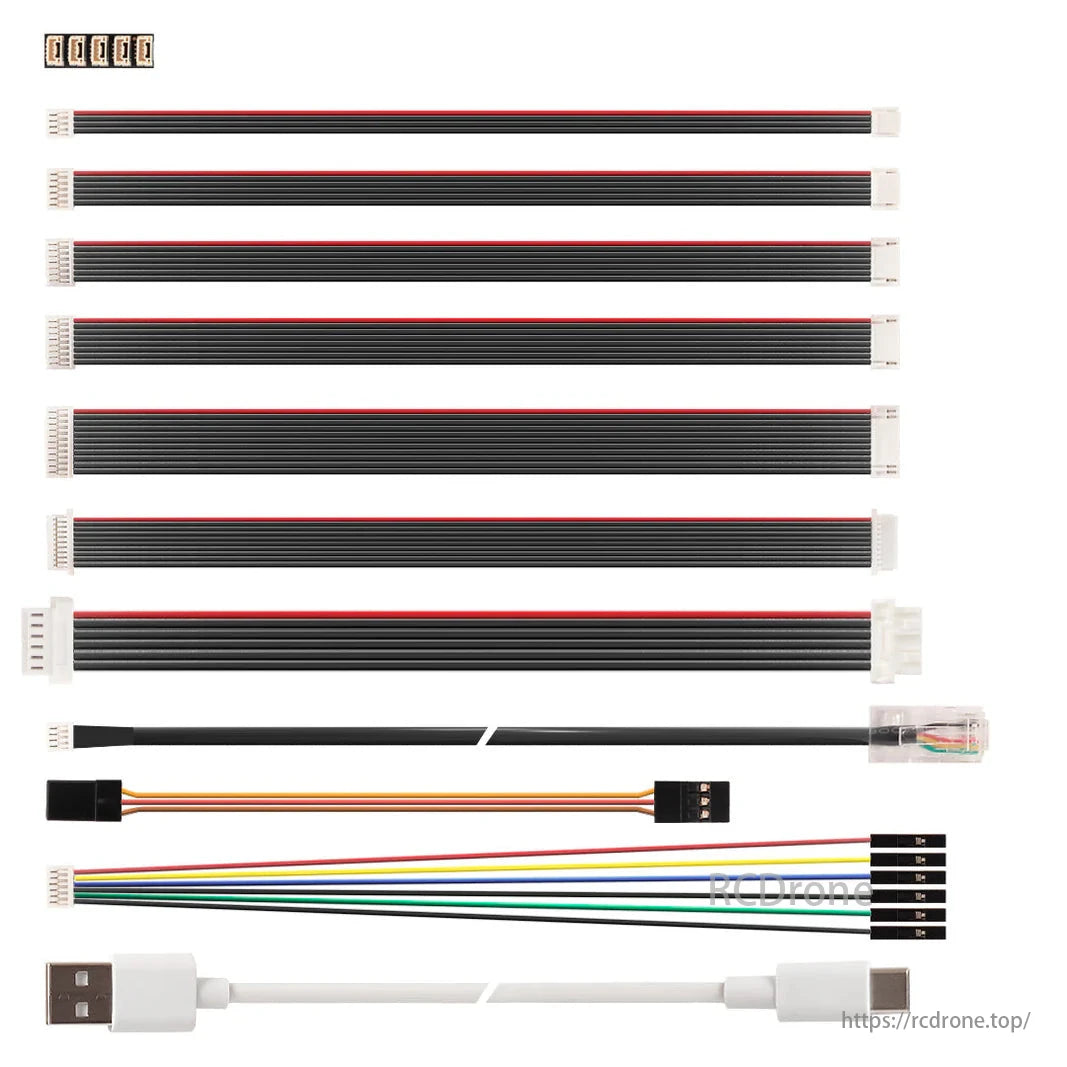
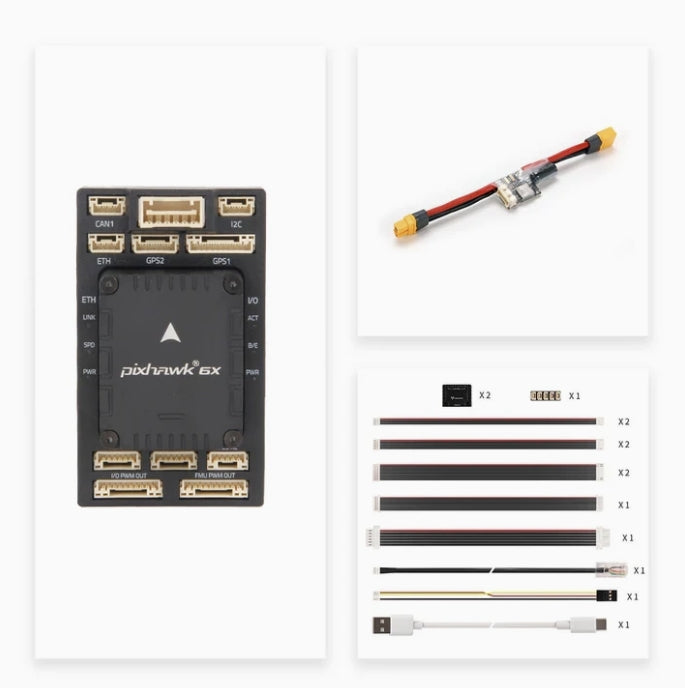
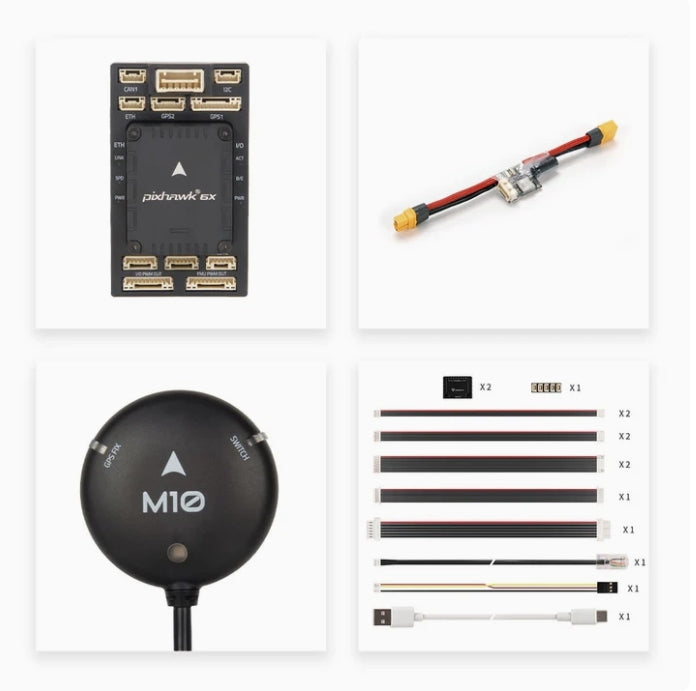
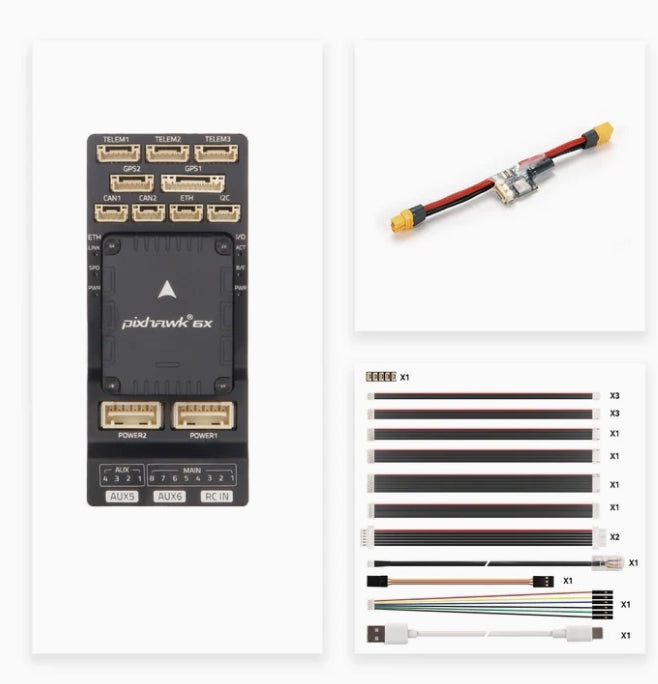
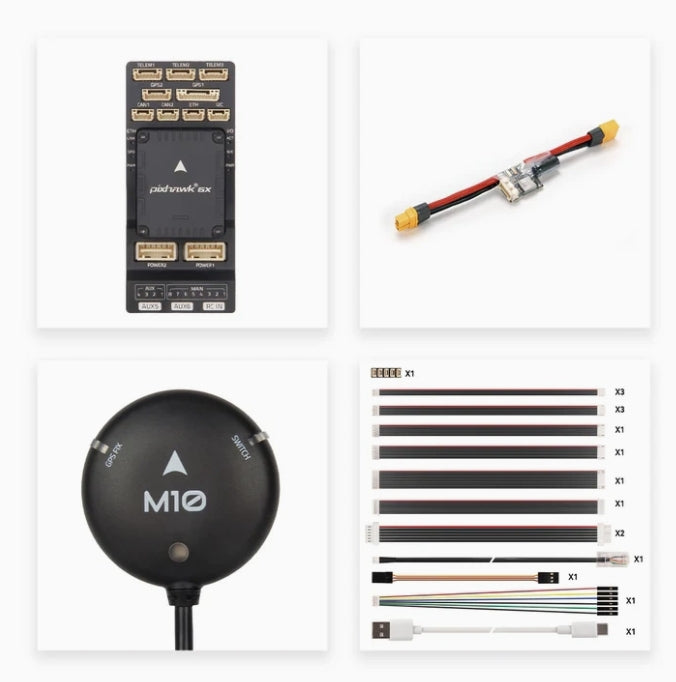
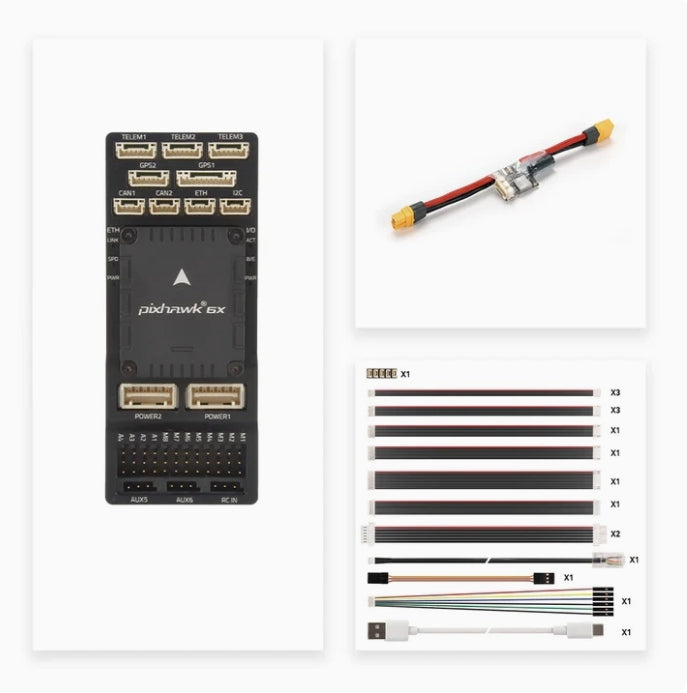
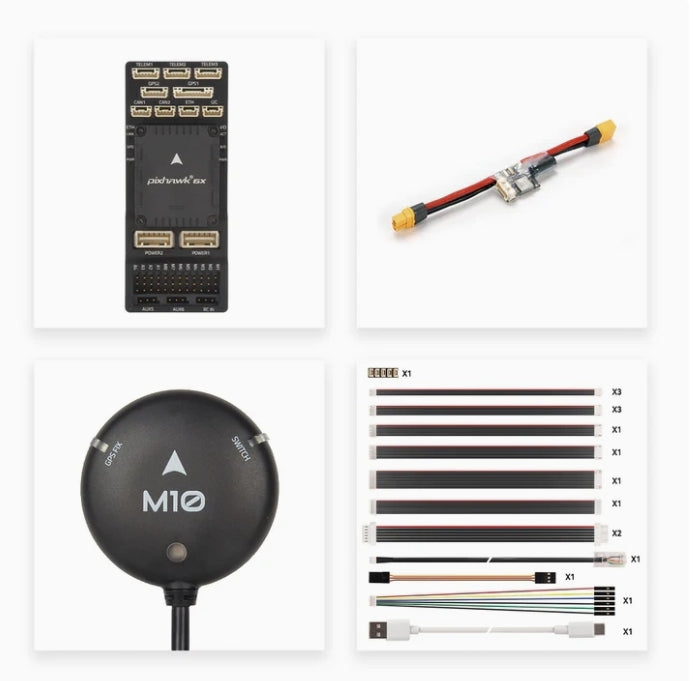
Pixhawk 6X offers a slimmer design with two models. It features an improved pin header for better connectivity and performance, making it ideal for advanced applications. Choose the right model for your needs.
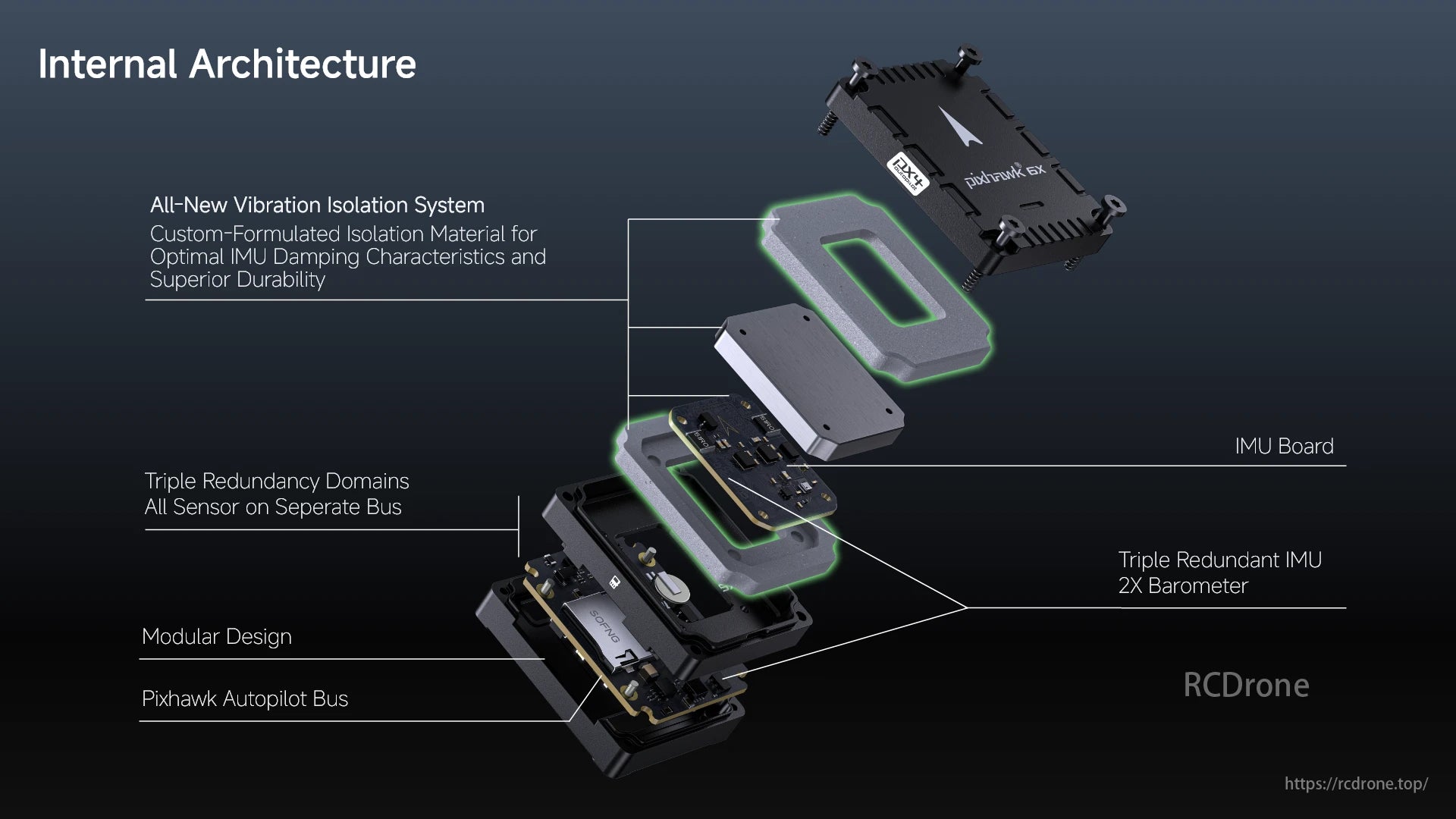
Holybro Pixhawk 6X offers vibration isolation, triple redundancy, modular design, autopilot bus, IMU board, and 2x barometer for advanced performance.
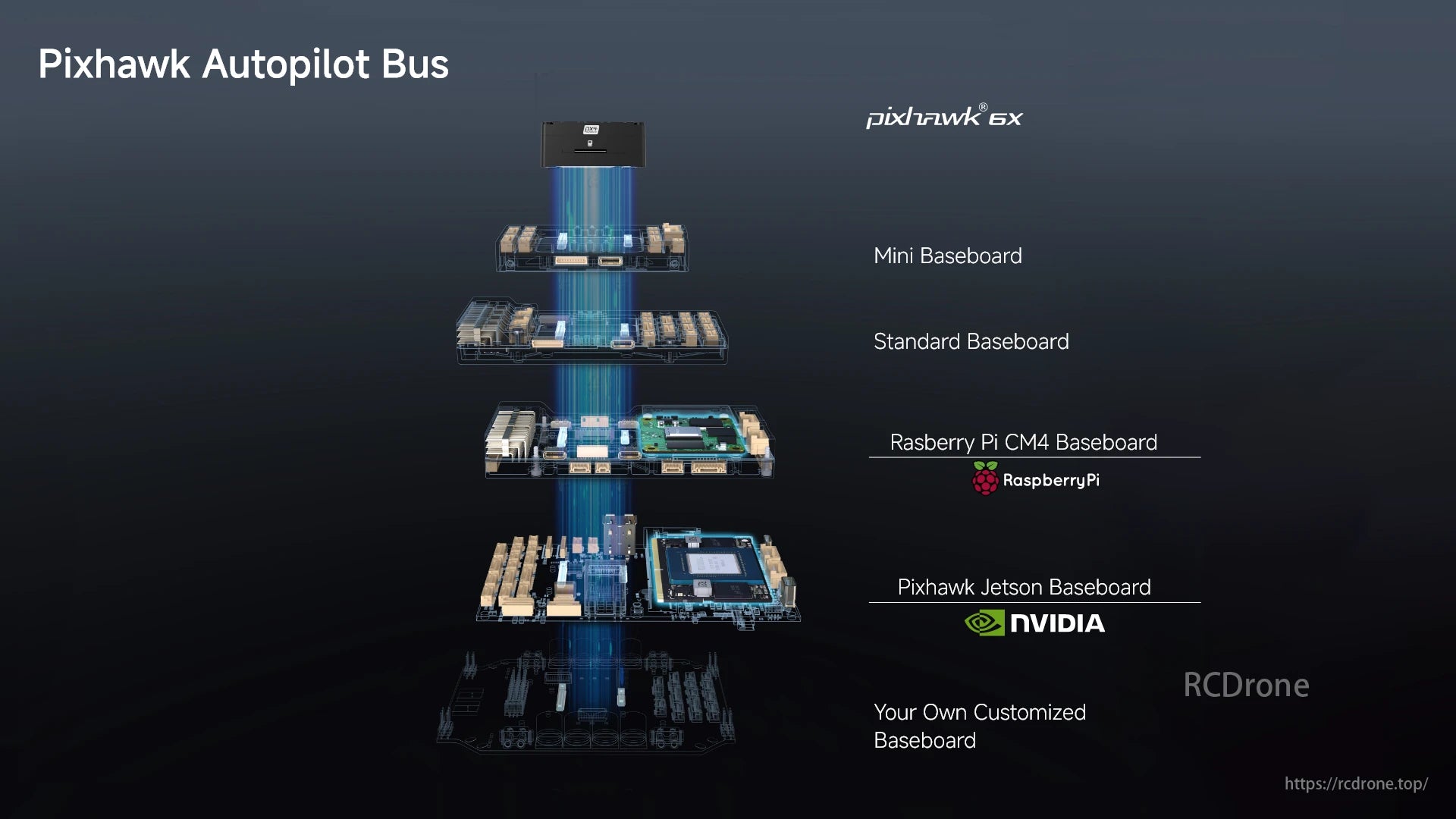
Pixhawk Autopilot Bus includes Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard, and custom options.

Temperature compensation resistors, redundant IMU & barometer, diverse sensor technologies, and isolation material ensure accuracy.

Pixhawk Autopilot Bus, STM H753 32-Bit Processor (480 MHz), Invensense ICM45686 IMU with BalancedGyro Technology, and NXP EdgeLock SE050 Secure Element are integrated into FMU Board.
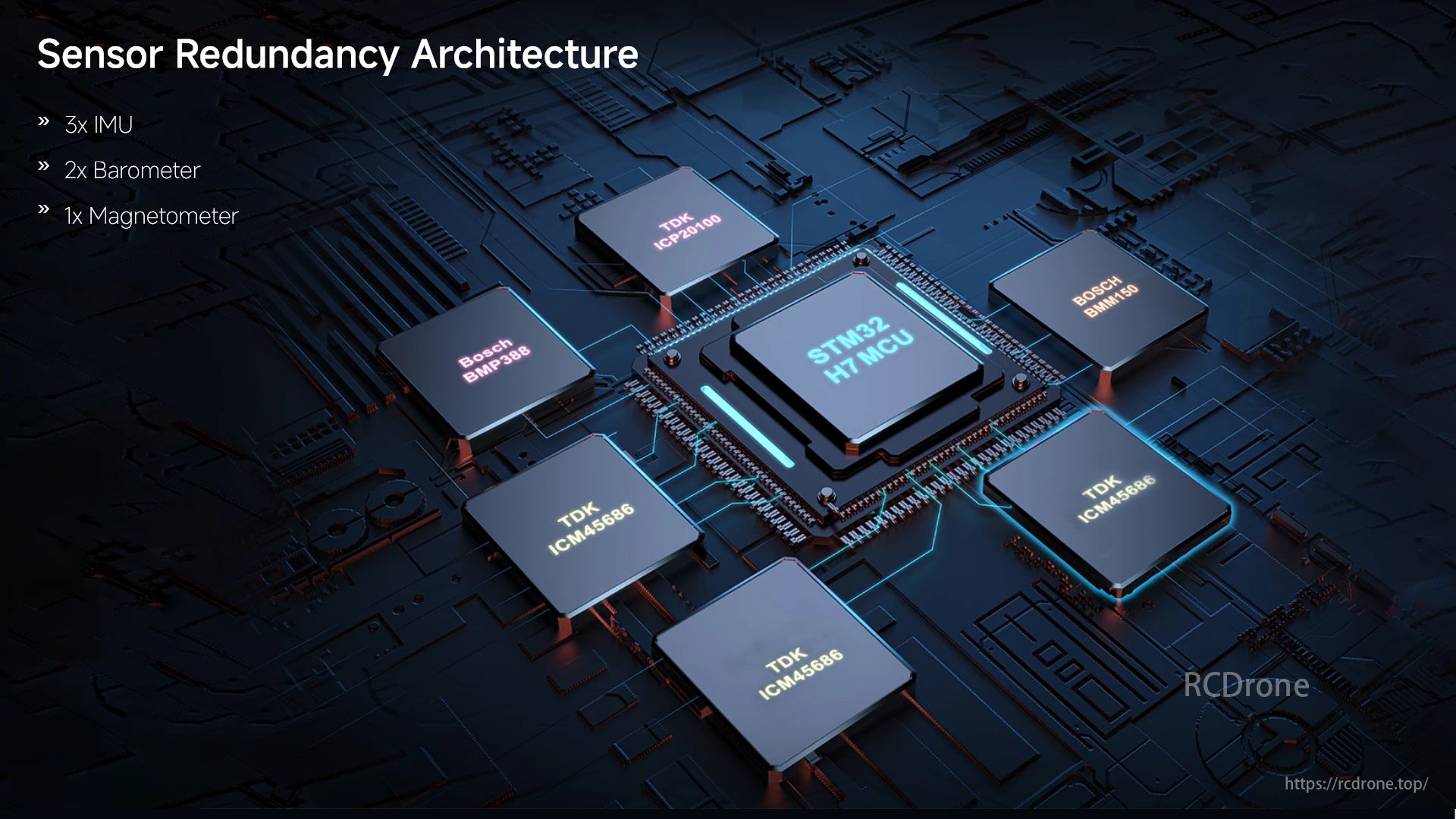
Sensor redundancy architecture with 3x IMU, 2x barometer, and 1x magnetometer. Features STM32 H7 MCU, TDK ICM-45686, Bosch BMP388, and BMM50 sensors for enhanced performance.
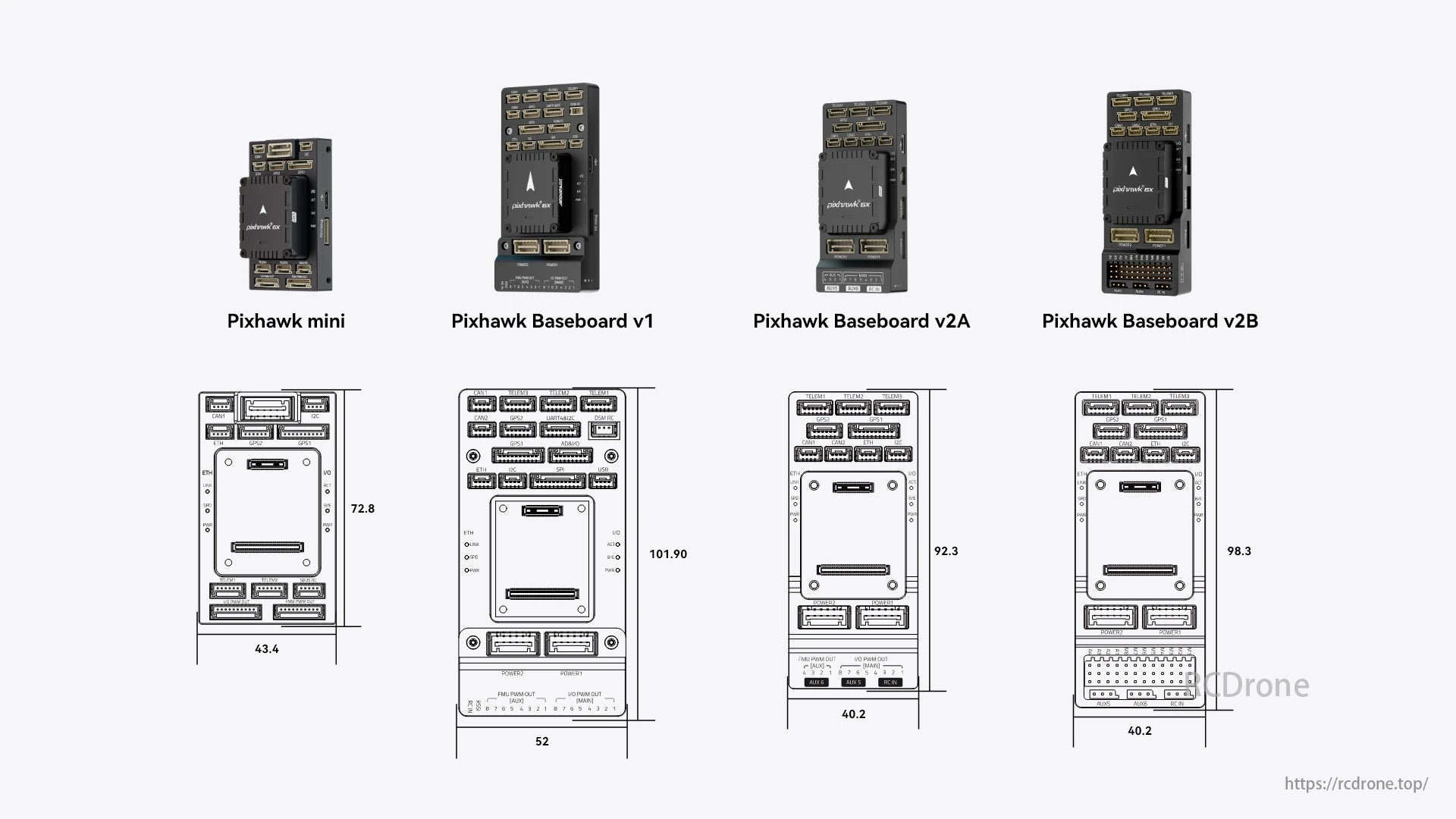
Pixhawk mini, Baseboard v1, v2A, and v2B flight controllers with dimensions: 43.4x72.8, 52x101.90, 40.2x92.3, and 40.2x98.3 respectively. Various ports and connectors are visible on each model.
Related Collections