Holybro Pixhawk Jetson Baseboard Bundle With 6X / 6X Pro and NVIDIA Jetson
Holybro Pixhawk Jetson Baseboard Bundle With 6X / 6X Pro and NVIDIA Jetson
HolyBro
Couldn't load pickup availability
Overview
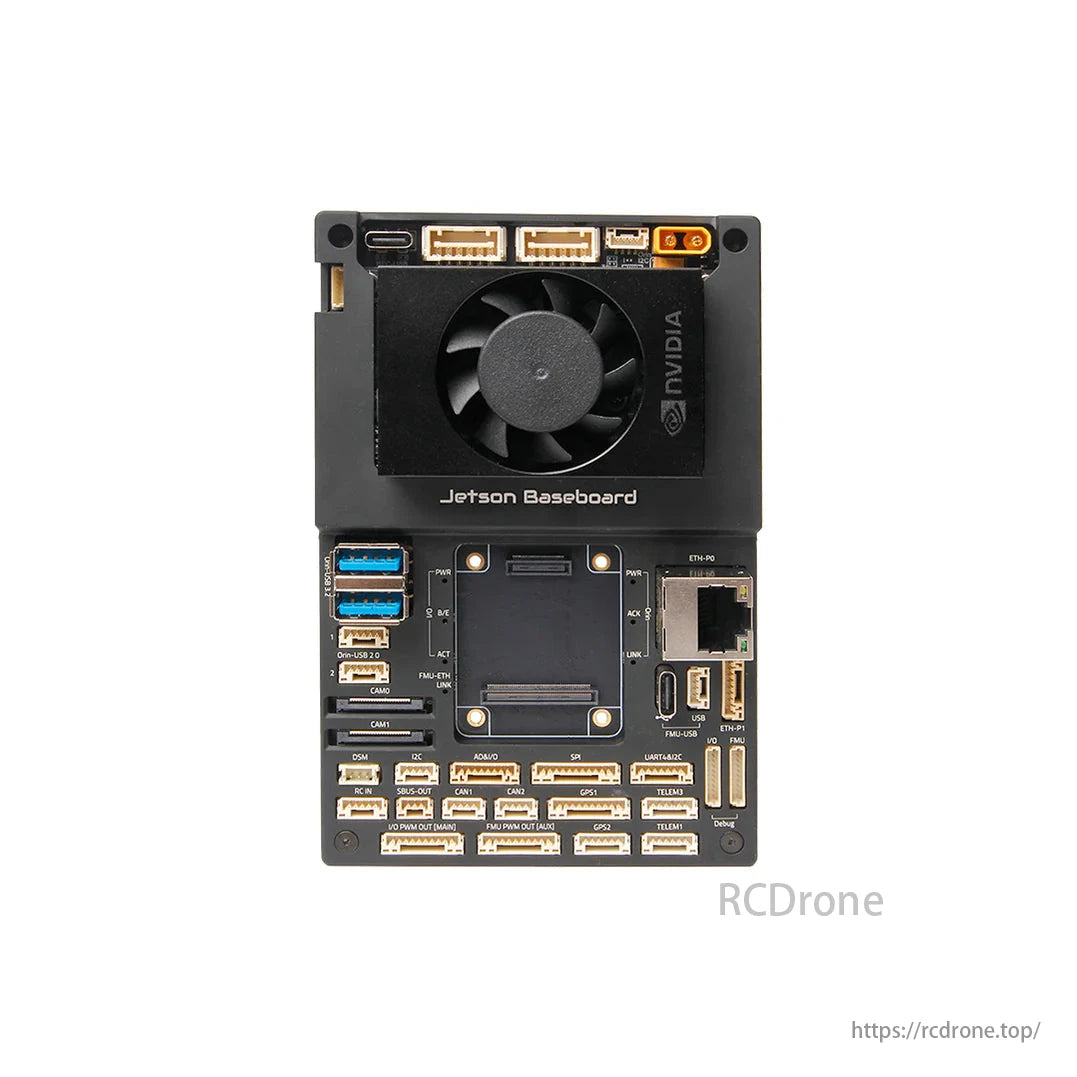
The Holybro Pixhawk Jetson Baseboard is designed based on the Pixhawk Autopilot Bus (PAB) open-source specification and integrates seamlessly with the NVIDIA Jetson Orin NX/Nano Carrier Board. The PAB Form Factor allows compatibility with any PAB flight controller, including the Pixhawk 6X. This board combines the computational power of NVIDIA Jetson with the flight control capabilities of Pixhawk, making it ideal for advanced autonomous applications.
Key Features
-
Unified System: Combines Pixhawk and NVIDIA Jetson in a single board.
-
Seamless Connectivity: Jetson and Pixhawk communicate via UART, CAN, and Ethernet switch.
-
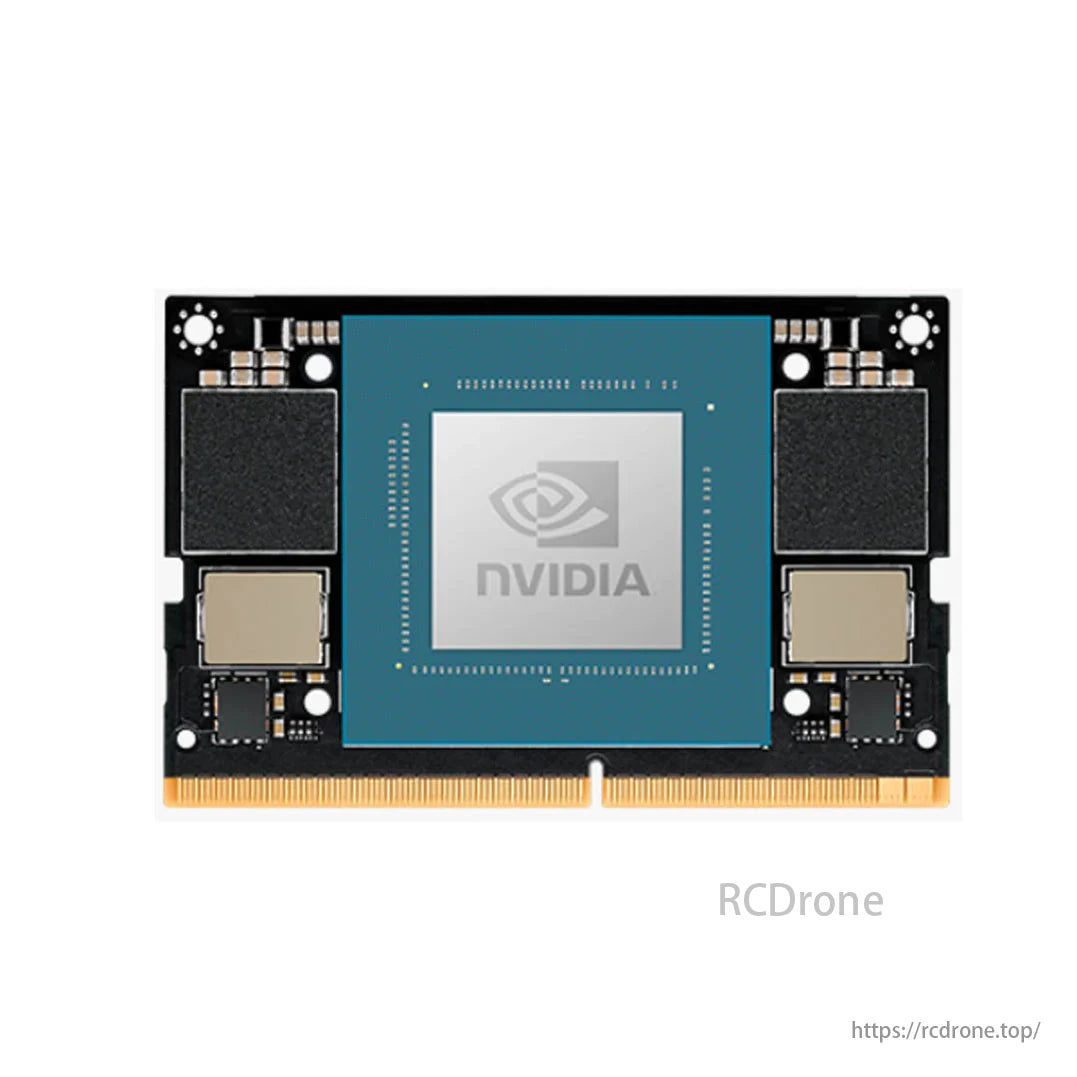
Broad Compatibility: Supports Jetson Orin NX & Orin Nano.
-
High-Speed Expansion: Features 2x M.2 key slots for WiFi/Bluetooth and NVMe SSD.
-
Pixhawk 6X Integration: Equipped with ICM-45686 sensors for enhanced flight control.
Processors & Sensors
FMU Processor:
-
STM32H753
-
32-bit ARM Cortex-M7, 480MHz
-
2MB Flash Memory, 1MB RAM
IO Processor:
-
STM32F103
-
32-bit ARM Cortex-M3, 72MHz
-
64KB SRAM
Onboard Sensors (Rev8)
-
Accelerometer/Gyro: 3x ICM-45686 (with BalancedGyro™ Technology)
-
Barometer: ICP20100 & BMP388
-
Magnetometer: BMM150
Baseboard Ports & Connectivity
Jetson Connectors
-
2x Gigabit Ethernet Ports (Connected to Jetson & Autopilot via RTL8367S Ethernet switch)
-
2x MIPI CSI Camera Inputs (4 Lanes each, 22-Pin Raspberry Pi Cam FFC)
-
2x USB 3.0 Host Ports (USB-A, 5A current limit)
-
2x USB 2.0 Host Ports (5-Pin JST-GH)
-
USB 2.0 for Debugging (USB-C)
-
Mini HDMI Output
-
2x M.2 Slots:
-
Key M (2242) for NVMe SSD (PCIEx4)
-
Key E (2230) for WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
CAN Port (Connected to Autopilot CAN2, 4-Pin JST-GH)
-
SPI, I2C, I2S, UART Ports (Various JST-GH connectors)
-
Fan Power Port
-
Power Input: XT30 Connector, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Recommended for >4S applications
Autopilot Connectors
-
Pixhawk Autopilot Bus Interface: 100-Pin & 50-Pin Hirose DF40
-
Redundant Digital Power Module Inputs
-
I2C Power Monitor Support
-
GPS & Safety Switch Ports: 10-Pin & 6-Pin JST-GH
-
2x CAN Ports (4-Pin JST-GH)
-
3x Telemetry Ports (JST-GH, one connected to Jetson’s UART1)
-
16 PWM Outputs (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C & 4-Pin JST-GH)
-
DSM Input (3-Pin JST-ZH, 1.5mm Pitch)
-
RC Input (PPM/SBUS, 5-Pin JST-GH)
-
SPI Port for External Sensor Bus (SPI5, 11-Pin JST-GH)
-
2x Debug Ports (FMU & IO, 10-Pin JST-SH)
Power Requirements
-
Input Voltage: 7-21V (3S-4S) via XT30 Connector
-
Minimum Power Requirement: 8V/3A (varies based on peripherals)
-
Supports External UBEC 12A (3-14S) for redundancy & higher voltage applications
-
Built-in Overvoltage Protection
Dimensions & Weight
-
Board Size: 126 x 80 x 38mm (without Jetson & Flight Controller)
-
Weight: 203.2g (Including Jetson, Heatsink, Flight Controller, SSD, Wi-Fi Module)
UBEC-12A Specifications
-
Input Voltage: 3~14S (XT30)
-
Output Voltage: 6.0V/7.2V/8.0V/9.2V (7.2V recommended for Jetson)
-
Continuous Output Current: 12A
-
Burst Output Current: 24A
-
Size: 48 x 33.6 x 16.3mm
-
Weight: 47.8g
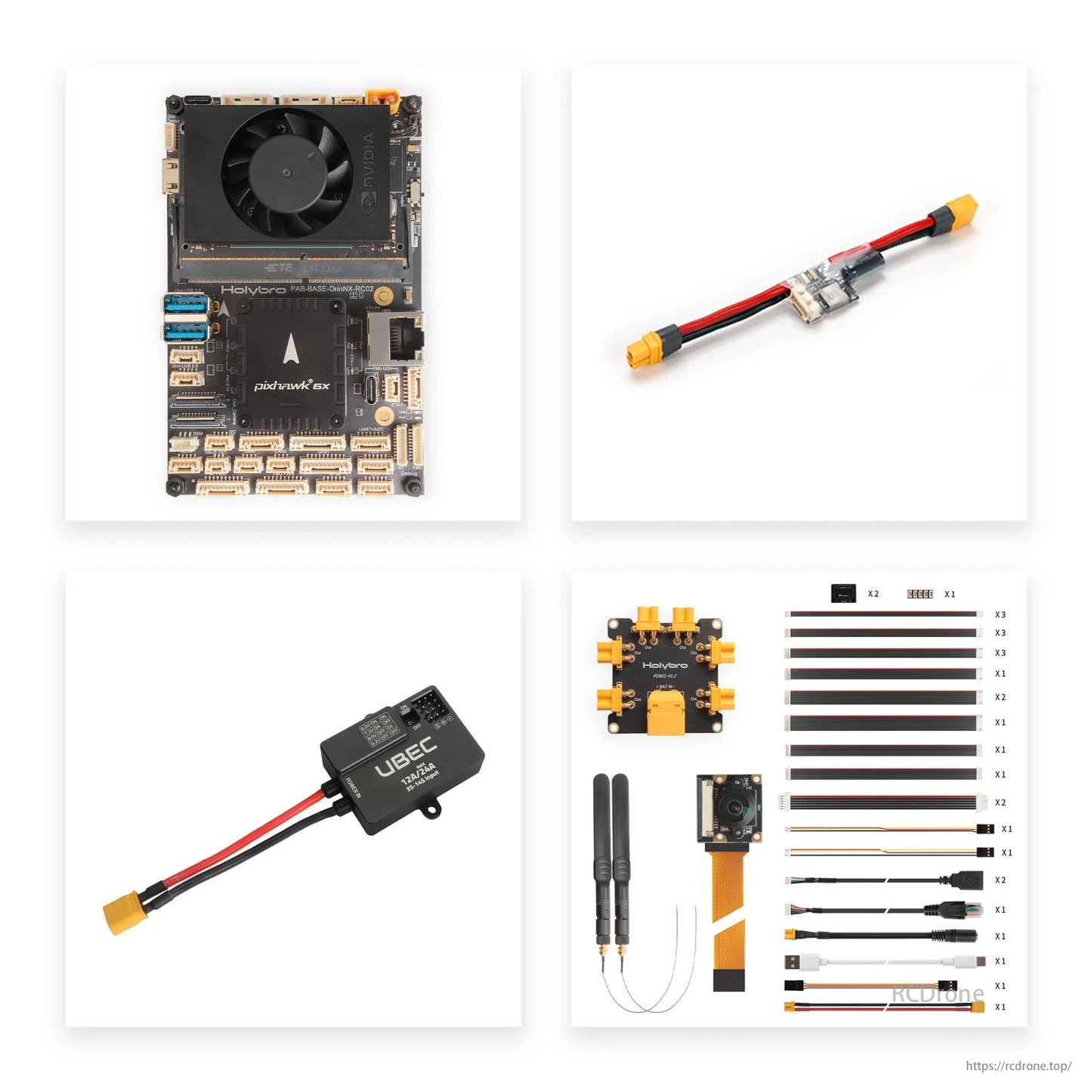
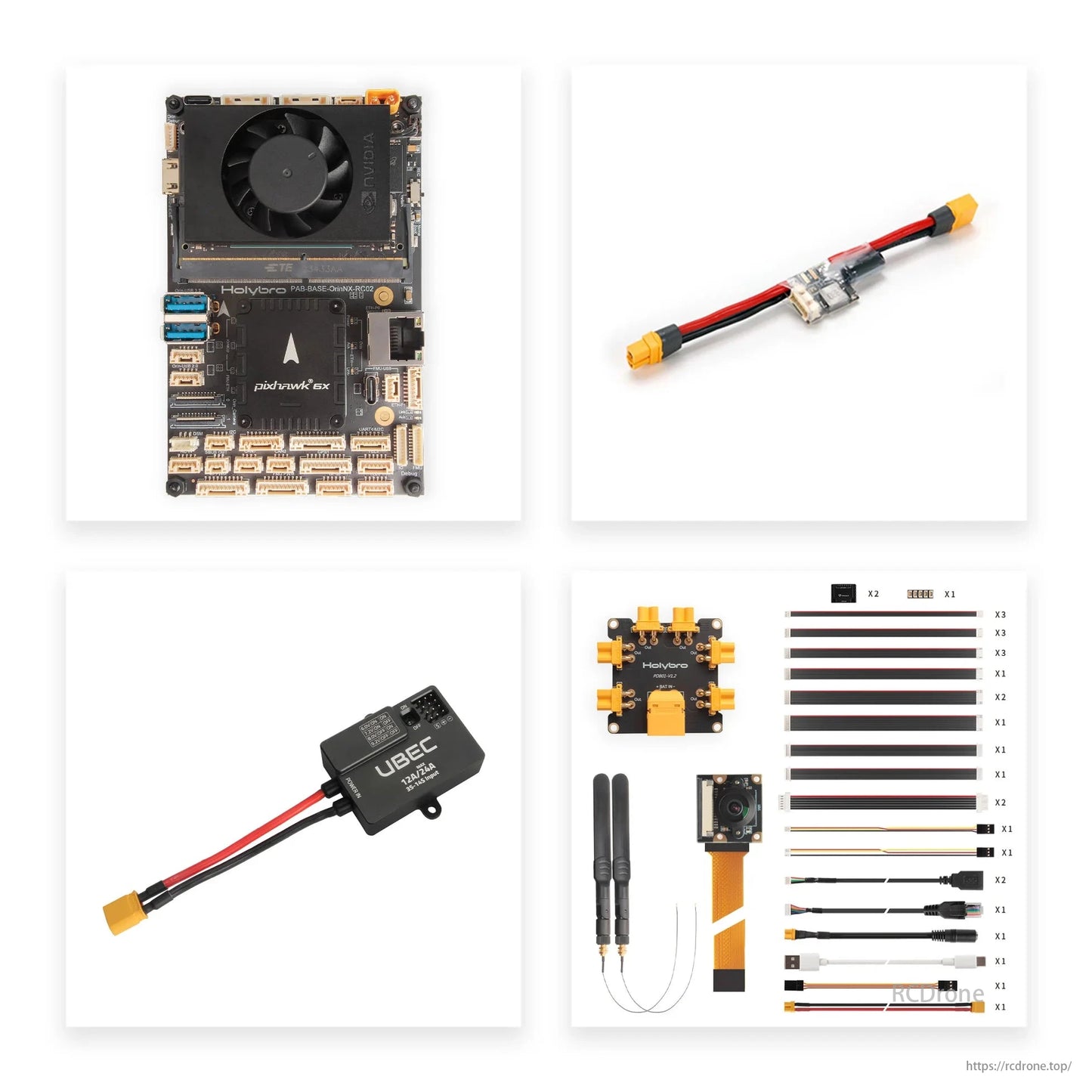
Package Contents
Pixhawk 6X Bundle
-
Pixhawk 6X (ICM-45686) Flight Controller Module
-
Pixhawk Jetson Orin Baseboard
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) with Heatsink & Fan
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi & Bluetooth Module: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Camera: IMX219-200
-
PM02D Power Module
-
UBEC 12A (3-14S)
-
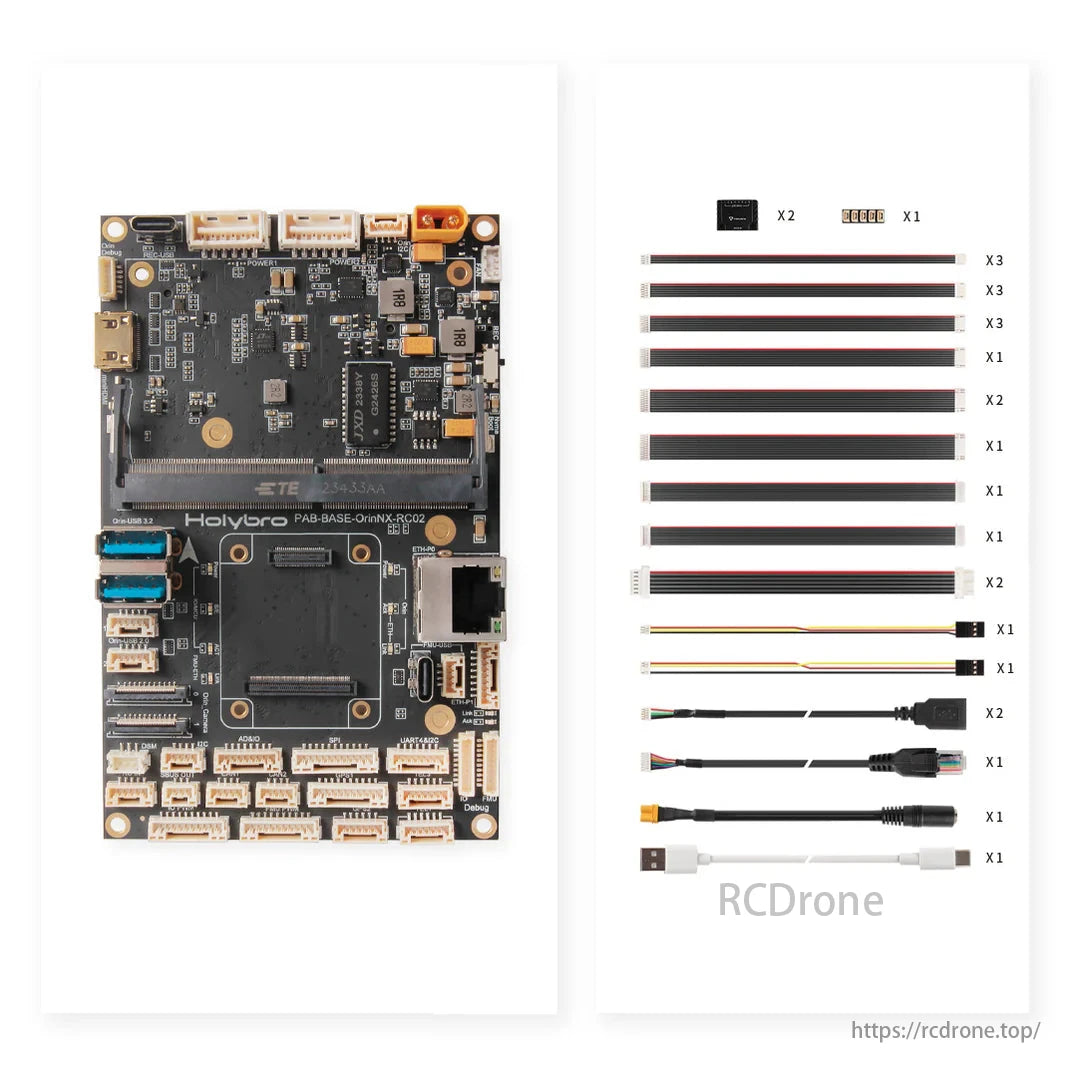
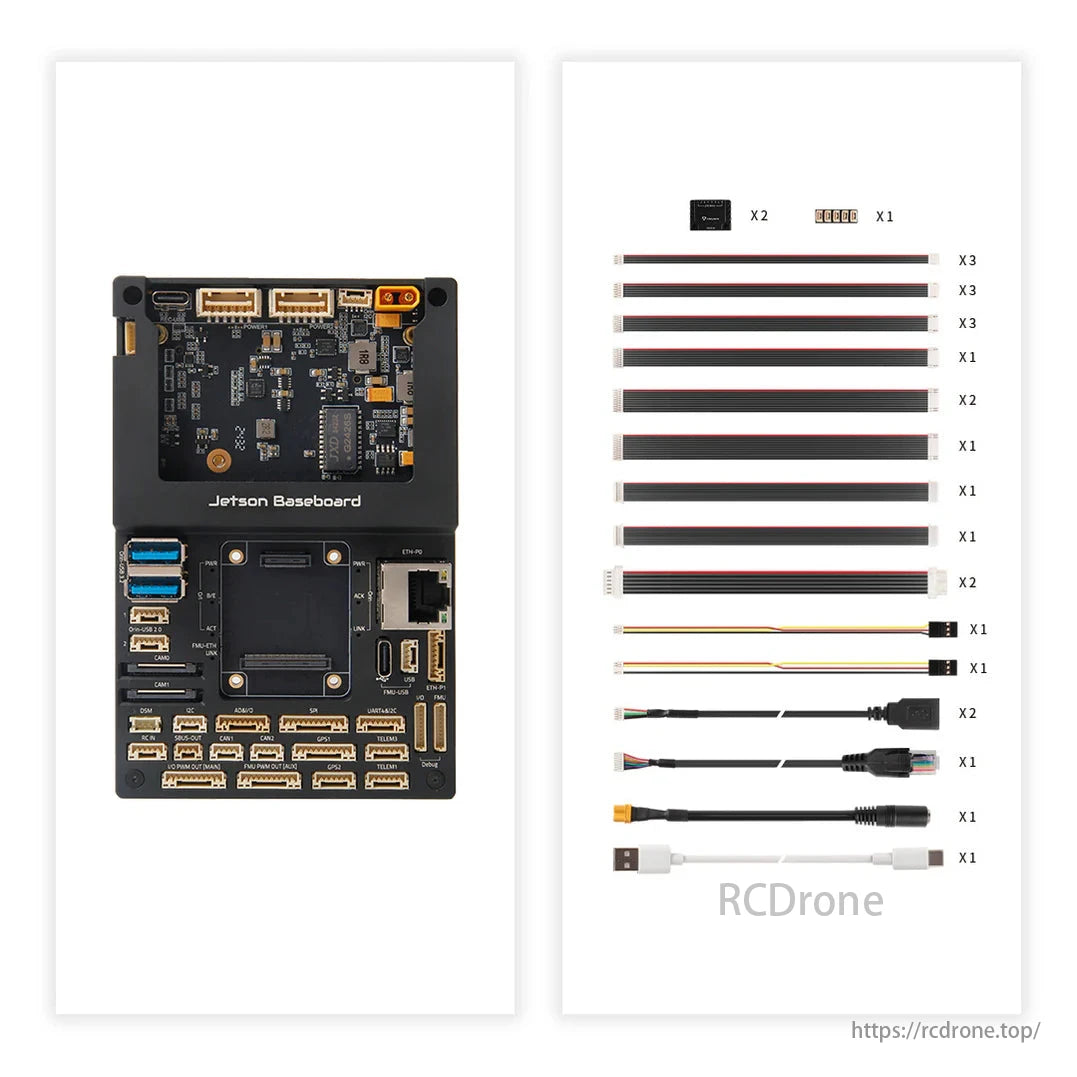
PDB Board & Cable Set
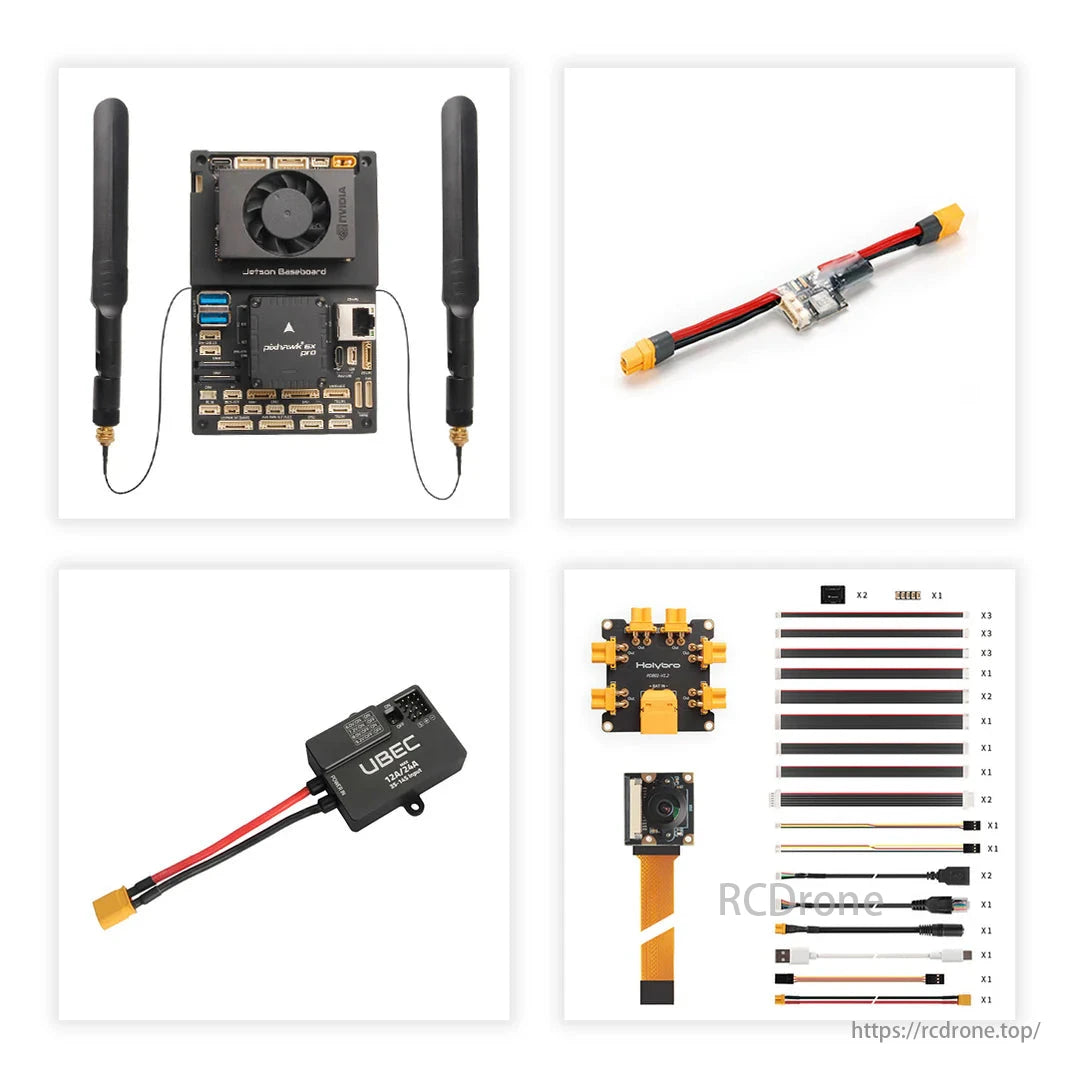
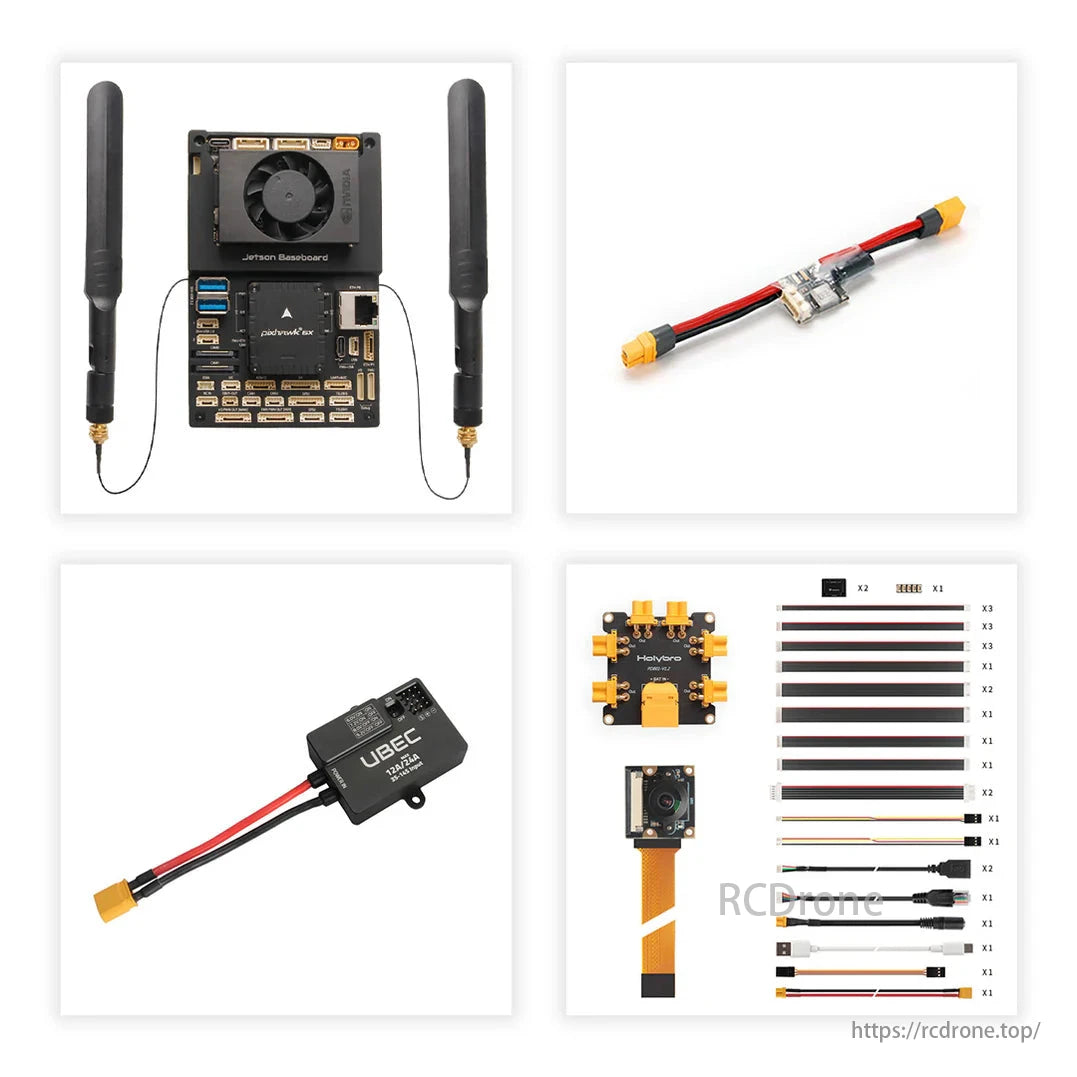
Pixhawk 6X Pro Bundle
-
Pixhawk 6X Pro Flight Controller Module
-
Pixhawk Jetson Orin Baseboard (w/ or w/o Case)
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) with Heatsink & Fan
-
SSD, Wi-Fi/Bluetooth Module, Camera, PM02D Power Module, UBEC 12A, PDB Board, Cable Set
Jetson Baseboard Only
-
Pixhawk Jetson Orin Baseboard (w/ or w/o Case)
-
Cable Set
Reference Links
Default Login Credentials for Jetson Orin:
-
ID:
holybro -
Password:
123
Details




Pixhawk and Nvidia Jetson combined in single board.

Nvidia jetson connected via uart can and ethernet switch using rj45 connector for autopilot systems
Pixhawk Autopilot Bus (PAB) Open Source Specification

Jetson SoDIMM Connector System Fully Compatible: Jetson Orin NX/Nano

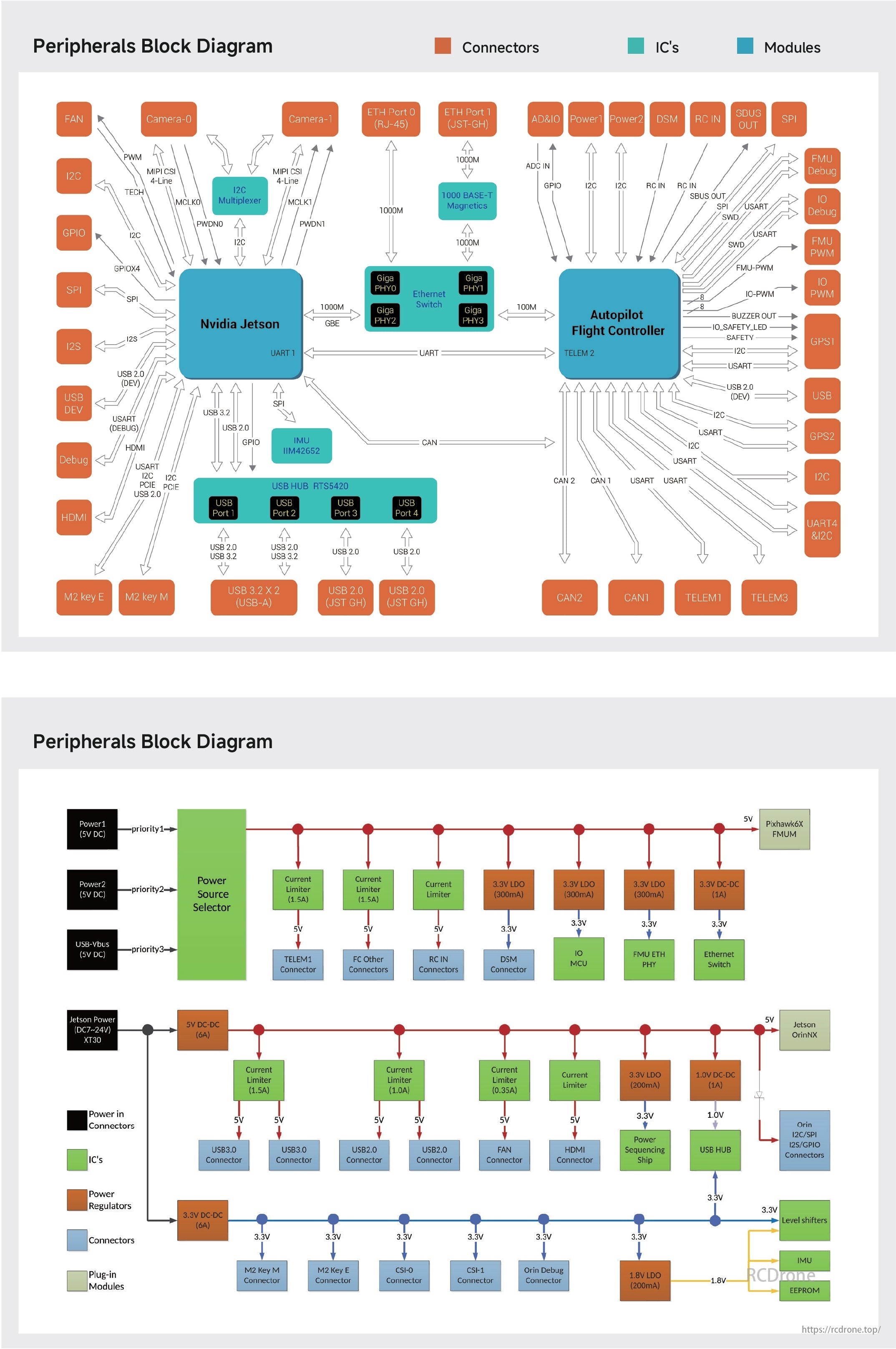
The image depicts a peripherals block diagram for an embedded system, featuring components like the Nvidia Jetson and Autopilot Flight Controller. It includes various connectors, ICs, and modules such as USB ports, Ethernet switches, and power regulators, illustrating their interconnections and data flow.
Reference Wiring Diagram

Two diagrams illustrate power distribution systems for a Jetson module using one battery. The left diagram uses a PM02D Power Module and a Power Distribution Board, while the right diagram includes an External UBEC for batteries greater than 4S. Both setups ensure proper voltage regulation for the Jetson and Pixhawk Power.
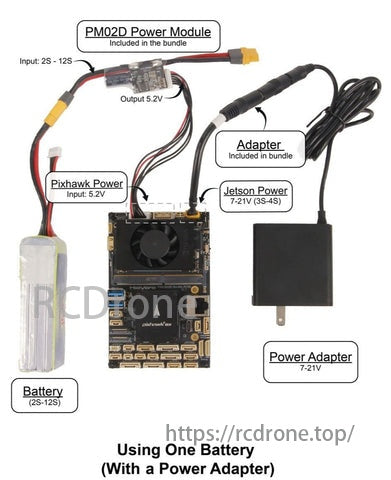
PM02D Power Module connects battery to Pixhawk and Jetson, using one battery with a power adapter for 7-21V input.