


Inspire Robots RH56DFTP Dexterous Robot Hand – 6 DOF, 30N Grip, Tactile & Force Sensors, ModbusTCP+CAN Control
Inspire Robots RH56DFTP Dexterous Robot Hand – 6 DOF, 30N Grip, Tactile & Force Sensors, ModbusTCP+CAN Control
Inspire Robots
Couldn't load pickup availability
Overview
The Inspire Robots RH56DFTP Intelligent Bionic Robot Hand is a high-precision, five-finger dexterous hand designed for advanced robotic applications. Featuring 6 degrees of freedom, 12 joints, and a combination of 6 force sensors and 17 tactile sensors, it delivers human-like dexterity and tactile perception. With a fingertip force of 30N (≈3 kg per finger), high-speed angular motion, and seamless ModbusTCP+CAN (RS485) communication, this hand is ideal for research, industrial automation, and bionic robotics.
Key Features
-
Human-like tactile precision: Integrated tactile sensors offer real-time perception for accurate object manipulation.
-
Strong and stable grip: Each finger provides up to 3 kg of actuation force, enabling reliable grasping of various objects.
-
Power-loss self-locking: Maintains position when powered off, eliminating the need for re-zeroing at startup.
-
High-speed operation: Thumb movement exceeds 130°/s, while four-finger motion reaches 200°/s for responsive control.
-
Durable and reliable: Built for long-term use in research labs, robotic platforms, and industrial environments.
Specifications
| Parameter | Value |
|---|---|
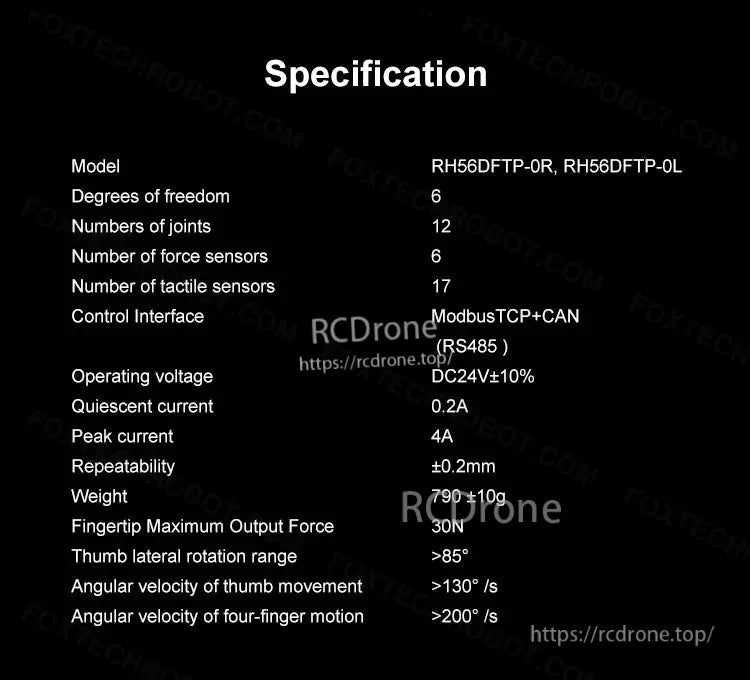
| Model | RH56DFTP-0R, RH56DFTP-0L |
| Degrees of freedom | 6 |
| Number of joints | 12 |
| Force sensors | 6 |
| Tactile sensors | 17 |
| Control interface | ModbusTCP + CAN (RS485) |
| Operating voltage | DC 24V ±10% |
| Quiescent current | 0.2A |
| Peak current | 4A |
| Repeatability | ±0.2mm |
| Weight | 790g ±10g |
| Fingertip maximum output force | 30N (≈3 kg) |
| Thumb lateral rotation range | >85° |
| Angular velocity – thumb | >130°/s |
| Angular velocity – four fingers | >200°/s |
Applications
-
Research and Development: Advanced robotics research in universities and laboratories.
-
Industrial Automation: High-precision assembly and handling tasks.
-
Bionic Solutions: Prosthetic hand studies and humanoid robotics.
-
AI and Machine Learning: Tactile sensing and manipulation projects requiring accurate real-time feedback.
Highlights
The RH56DFTP excels in tasks that require precise force control and delicate operations, such as picking blueberries, cherry tomatoes, or grapes without causing damage. It also handles high-force gripping for robust industrial applications, making it a versatile solution for complex manipulation tasks.
Details
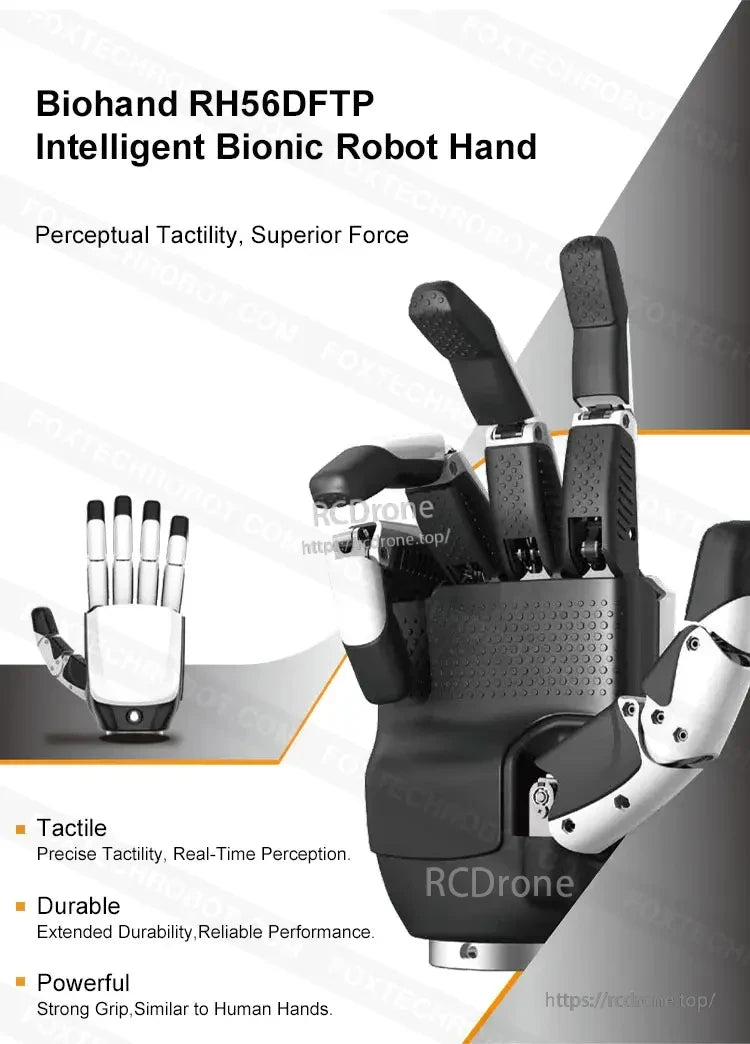
Biohand RHS6DFTP intelligent bionic robot hand offers perceptual tactility, superior force, and precise tactility in real-time, with durable extended durability for reliable performance and powerful strong grip similar to human hands.

Robotic hand with six degrees of freedom, designed for precision and dexterity, perfect for various applications such as surgery, assembly, or laboratory work.

Powerful grip, human-like performance. 3kg actuation force per finger. Dexterous robot hand with advanced design and precision engineering.


Power loss self-locking mechanism holds position stable and reliable without re-zeroing required at startup or shutdown.


Multi-functional hand tool with force sensor, suitable for picking and pinching small fruits like blueberries, cherry tomatoes, and grapes.

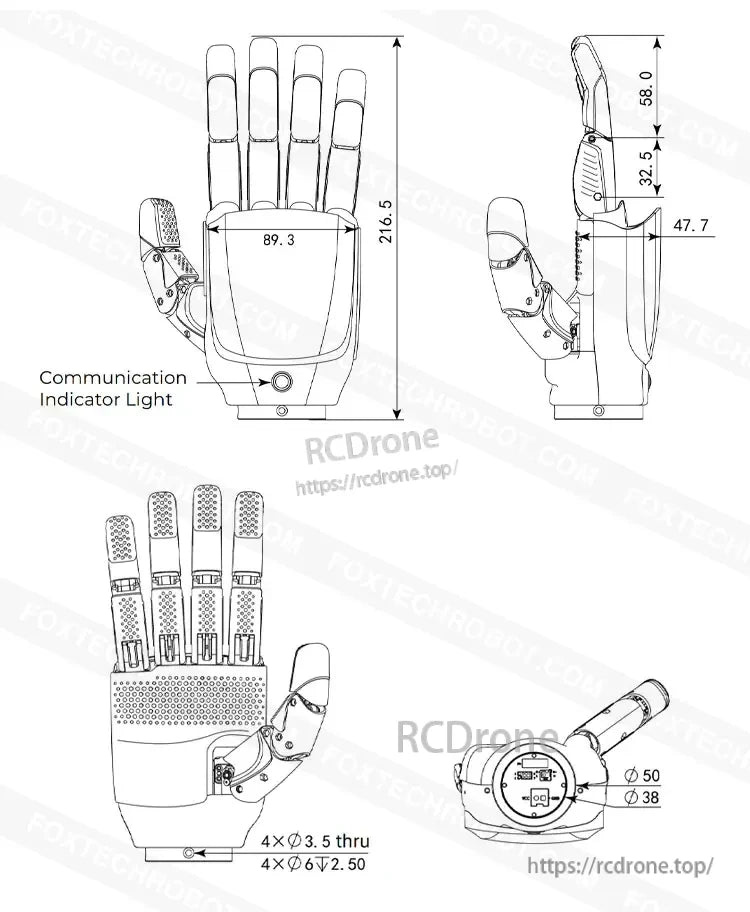
Communication Indicator Light, 8 x 47.7 mm, 89 mm long, no LED, 5x5: 38-4x03.5 to 4xp6v2, 50 ohms, 2 layers
The RHS6DFTP-OR and RHS6DFTP-OL specification model features 3 degrees of freedom, 12 joints, and 17 force sensors and tactile sensors. It uses Modbus TCP+CAN (RS485) control interface with a DC24V +10% operating voltage.



Related Collections


