

JUXIE INTELLIGENT CE-HM-R83 Series, 48 V 250 W, 51:1/101:1/161:1, Dual 19-bit Encoders Robot Motor for Humanoid Joints
JUXIE INTELLIGENT CE-HM-R83 Series, 48 V 250 W, 51:1/101:1/161:1, Dual 19-bit Encoders Robot Motor for Humanoid Joints
JUXIE INTELLIGENT
Couldn't load pickup availability
Overview
The JUXIE INTELLIGENT CE-HM-R83 Series is an integrated robot motor and joint module for humanoid and mobile robotics. It combines a high-precision harmonic reducer, a frameless torque motor, and dual magnetic encoders in a compact R83 form factor. Three configurations (51:1, 101:1, 161:1) provide rated torque up to 84 Nm with 15 arcsec backlash. The built-in driver supports EtherCAT/CAN with 50KHz current loop and 10KHz speed loop. Typical use includes shoulder, elbow, knee, and waist joints. Overall dimensions are R83*59mm and weight is 1.1kg.
Key Features
- Integrated harmonic reducer + frameless torque motor + high-precision dual magnetic encoder.
- Dual encoders with single-turn absolute value: 19-bit per turn.
- Gear ratios: 51:1, 101:1, 161:1; rated torque 27/53/84 Nm, peak torque 66/120/200 Nm.
- Backlash: 15 arcsec across configurations.
- Electrical ratings: 48 V, 250 W, rated speed 3000 RPM, rated current 6 A, peak current 16 A.
- Driver interface: EtherCAT/CAN; current loop 50KHz; speed loop 10KHz.
- Compact and lightweight: R83*59mm, 1.1kg; hollow-shaft design.
Specifications
| Parameter | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| Output Speed (RPM) | 60 | 30 | 18 |
| Rated Torque (Nm) | 27 | 53 | 84 |
| Peak Torque (Nm) | 66 | 120 | 200 |
| Backlash (Arcsec) | 15 | 15 | 15 |
| Rated Voltage (V) | 48 | 48 | 48 |
| Rated Power (W) | 250 | 250 | 250 |
| Rated Speed (RPM) | 3000 | 3000 | 3000 |
| Rated Current (A) | 6 | 6 | 6 |
| Peak Current (A) | 16 | 16 | 16 |
| Encoder | Dual encoders; single-turn absolute value: 19-bit per turn | Dual encoders; single-turn absolute value: 19-bit per turn | Dual encoders; single-turn absolute value: 19-bit per turn |
| Driver | Interface: EtherCAT/CAN; Current loop: 50KHz; Speed loop: 10KHz | Interface: EtherCAT/CAN; Current loop: 50KHz; Speed loop: 10KHz | Interface: EtherCAT/CAN; Current loop: 50KHz; Speed loop: 10KHz |
| Overall Dimensions | R83*59mm | R83*59mm | R83*59mm |
| Overall Weight | 1.1kg | 1.1kg | 1.1kg |
| Typical Applications | shoulder joint, elbow joint, knee joint, waist joint. | shoulder joint, elbow joint, knee joint, waist joint. | shoulder joint, elbow joint, knee joint, waist joint. |
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Manuals
Details
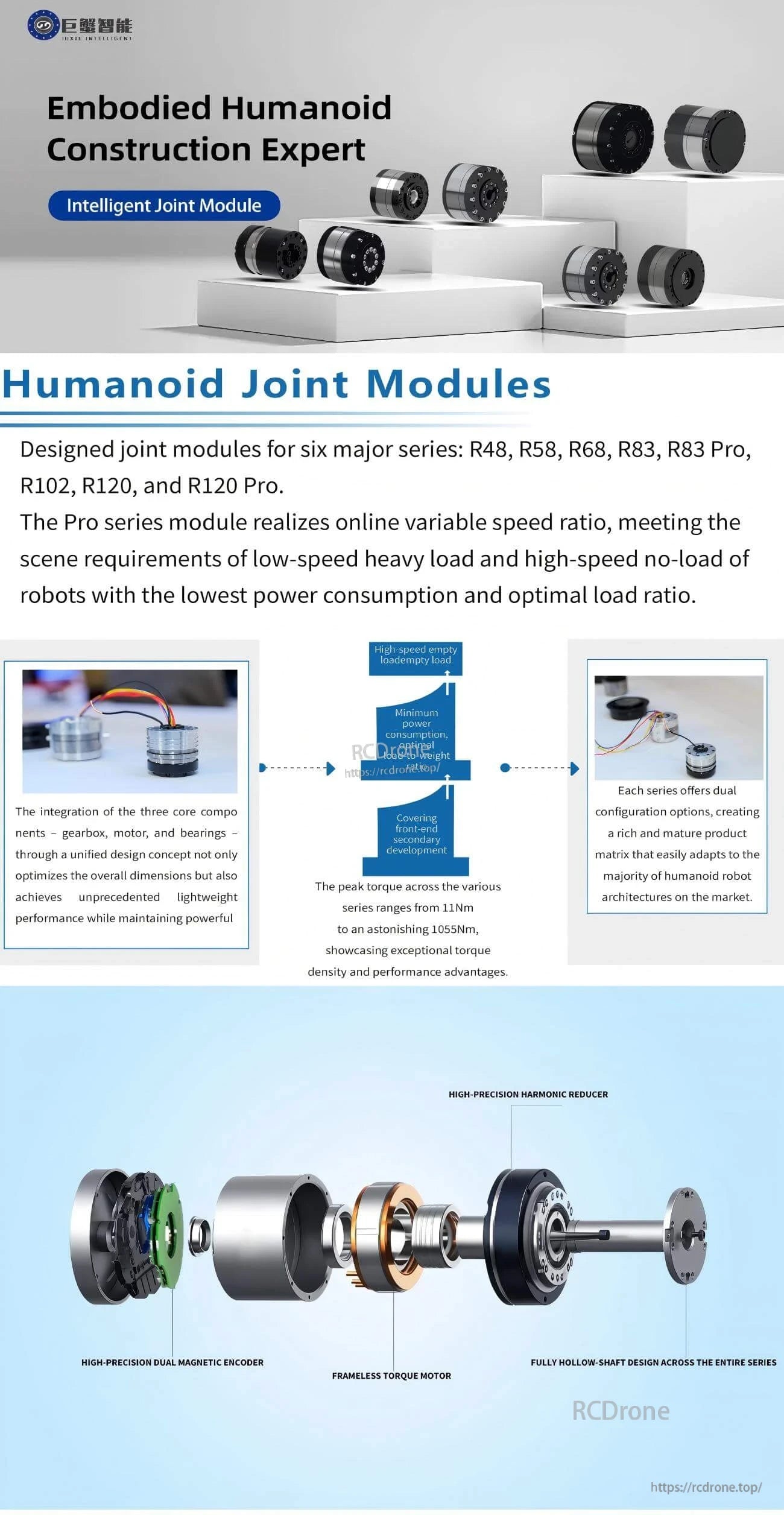
Intelligent joint modules for humanoid robots, featuring high-precision harmonic reducer, dual magnetic encoder, frameless torque motor, and hollow-shaft design. Offers variable speed, low power consumption, and peak torque up to 1055Nm.

Related Collections

