













LINKERBOT Linker Hand L10 Robot Hand, 10 DoF, CAN/RS485 Control, Worm Gear Drive, 80N Grip, DC24V+/-10%
LINKERBOT Linker Hand L10 Robot Hand, 10 DoF, CAN/RS485 Control, Worm Gear Drive, 80N Grip, DC24V+/-10%
LINKERBOT
Couldn't load pickup availability
Overview
LINKERBOT Linker Hand L10 is a Robot Hand designed for dexterous manipulation and precise control. It features 10 degrees of freedom with a worm gear transmission and communicates via CAN/RS485 for reliable integration into research and industrial systems.
Key Features
- 10 DoF dexterous hand with worm gear transmission for stable actuation.
- Control interfaces: CAN and RS485.
- Repeat positioning accuracy < +/-0.2mm; typical open/close time 1.2s.
- Force capability: 15N max thumb fingertip force, 15N max four-finger fingertip force, 80N max five-finger grasping force.
- Control modes and utilities from the product manual: position control, speed control, haptic feedback (force control) via fingertip sensors, and online firmware upgrade.
- Ecosystem (per product materials): supported robotic arms UR, Franka, XArm, RealMan, AgileX; supported simulators Pybullet, Isaac, MuJoCo; usage examples include ROS1, ROS2, Python, C++; data acquisition methods include teleoperation gloves, exoskeleton gloves, liquid metal sensing gloves, vision, and VR (Meta Quest 3).
For pre-sales or integration support, contact [email protected] or visit https://rcdrone.top/.
Specifications
| Degrees of Freedom (DoF) | 10 |
| Number of Joints | 20 (10 Active + 10 Passive) |
| Transmission Mode | Worm Gear Transmission |
| Control Interface | CAN/RS485 |
| Weight | 800g |
| Maximum Load | 25kg |
| Operating Voltage | DC24V+/-10% |
| Static Current | 0.2A |
| Average Current (No-Load Movement) | 0.5A |
| Maximum Current | 3A |
| Repeat Positioning Accuracy | < +/-0.2mm |
| Opening/Closing Time | 1.2s |
| Maximum Thumb Fingertip Force | 15N |
| Maximum Four-Finger Fingertip Force | 15N |
| Maximum Five-Finger Grasping Force | 80N |
Pressure Sensor
| Piezoresistive Array | 6*12 |
| Sensor Force-Bearing Area | 9.6*14.4mm |
| Trigger Force | 5g |
| Measurement Range | 20N |
| Service Life | 100,000 Cycles |
| Communication Frame Rate | 200FPS |
Capacitive Sensor (Optional)
| Sampling Frequency | >=50Hz |
| Measurement Range | 0-30N |
| Overload Limit | 60N |
| Pressure Sensitivity | 0.1N |
| Measurement Resolution | 0.5%FS |
| Measurement Accuracy | 2%FS |
| Pressure Resolution | 0.25N |
| Direction Resolution | 45° |
| Detection Distance | 1cm (Metal, Human Body) |
What’s Included
- USB-to-CAN Debugging Cable x1
- Connector Cable XT30 (2+2) x1
- Power Adapter x1
- Power Cable x1
- Linker Hand L10 x1
Applications
- Dexterous manipulation research and education using ROS1/ROS2 and simulators (Pybullet, Isaac, MuJoCo).
- Teleoperation via gloves, exoskeleton gloves, liquid metal sensing gloves, vision, and VR (Meta Quest 3).
- Precision assembly, path-based operations, screw tightening, thin sheet grasping, and general object handling.
Manuals
Linker_Hand_L10_Product_Manual.pdf
Details

Linker Hand L10 offers 10 DOF, precise motion via linkage mechanism and custom motor drivers. Supports UR, Franka, ROS, Python, VR, Pybullet, CAN, and more for versatile robotic integration and control.
The Linker Hand L10 delivers high dexterity, with each finger offering 4 degrees of freedom for precise operations. Its multi-sensor system—equipped with cameras and e-skin—provides comprehensive environmental awareness and adaptive interaction. Through end-cloud integration, users can rapidly deploy the hand via a code-free skill library cloud service, enabling efficient customization while reducing operational complexity. Together, these capabilities support a wide range of complex applications, enhancing both precision and ease of use without requiring extensive programming or setup.

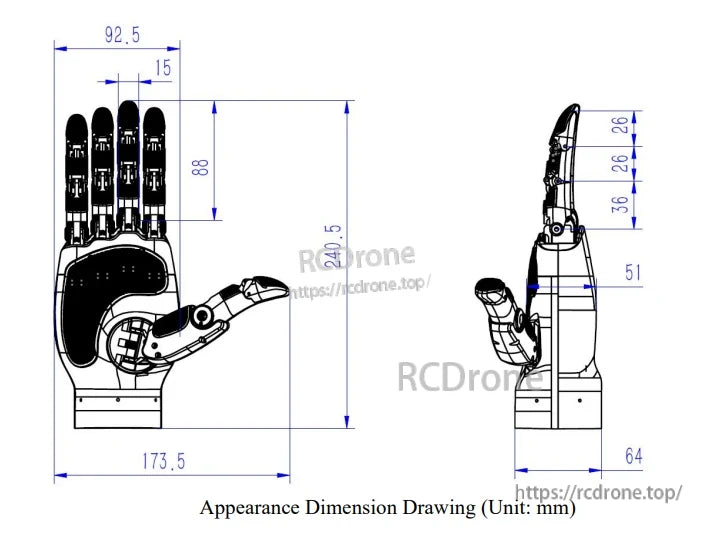
Robot hand dimensions in millimeters, showing front and side views with precise measurements for design and assembly.
Linker Hand L10B offers precise position and speed control, haptic feedback for force management, and online firmware upgrades. Designed for accuracy, safety, and adaptability in industrial and research applications requiring fine manipulation and long-term performance.
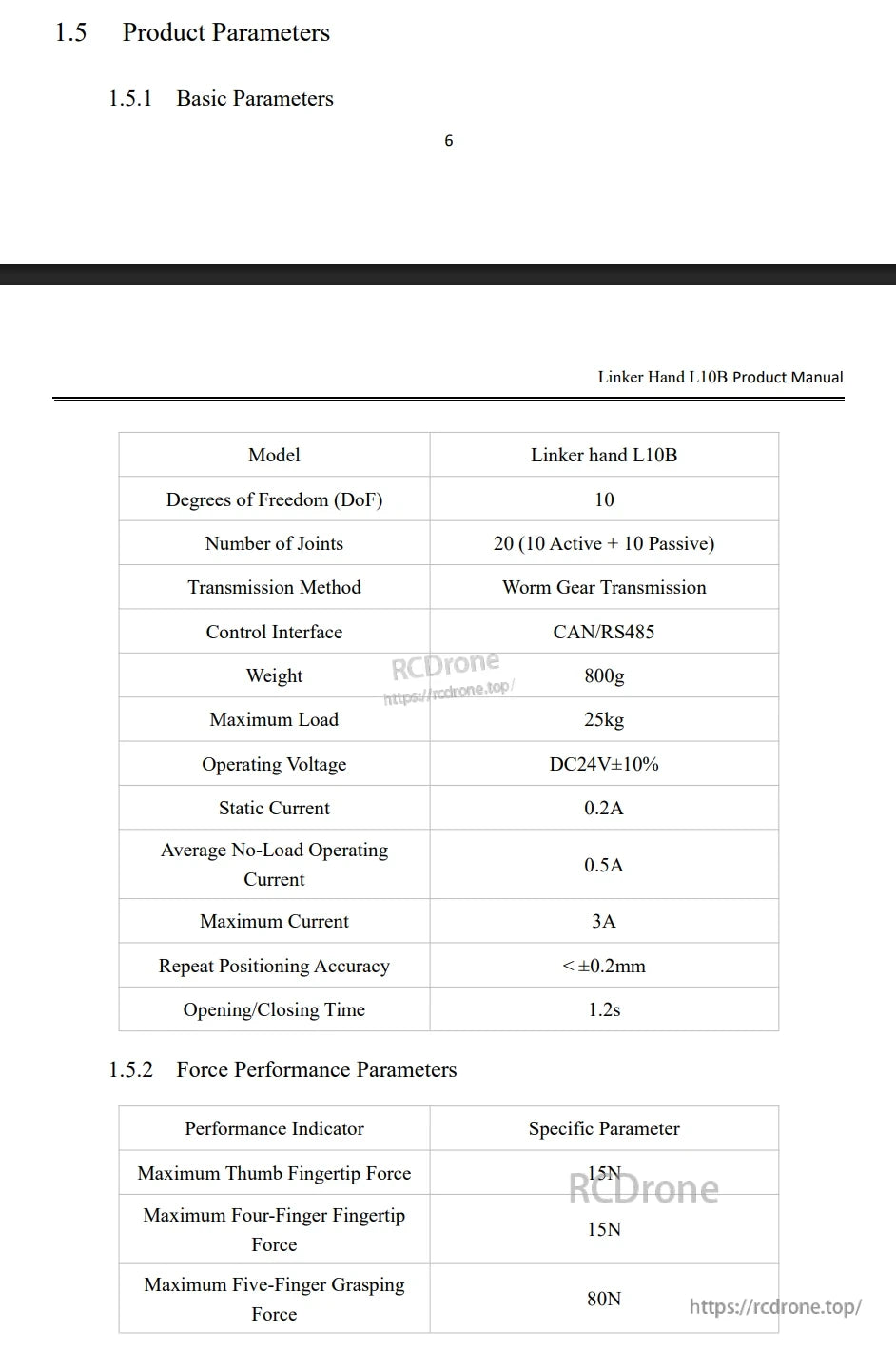
Linker Hand L10B offers 10 DoF, 20 joints, worm gear transmission, and CAN/RS485 control. Weighing 800g, it handles up to 25kg at DC24V, delivering precise positioning and grasping forces up to 80N.

Features a 6x12 piezoresistive array (20N range, 100k cycles). Optional capacitive sensor: ≥50Hz sampling, 0–30N range, 45° direction resolution, detects metal or human body at 1cm.
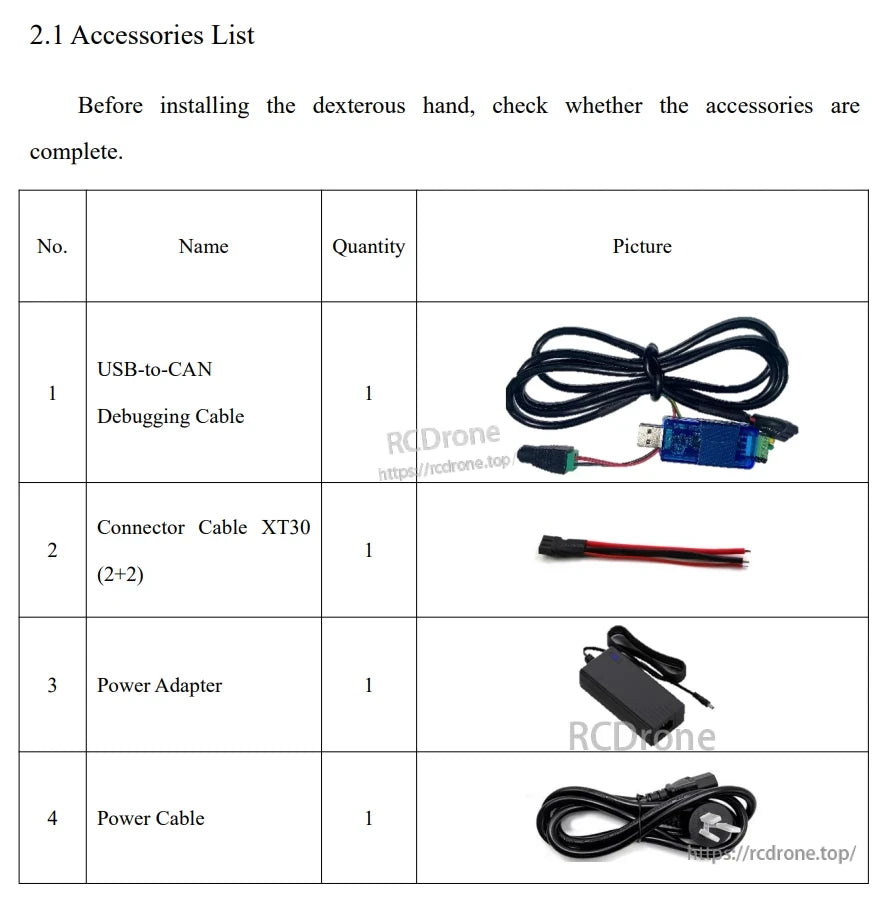
Accessories list for dexterous hand installation: USB-to-CAN cable, XT30 connector, power adapter, and power cable, each quantity one.
Related Collections













