







LINKERBOT Linker Hand L6 Robot Hand, 6 DoF, CAN, Linkage Drive, 50N Grasp, ±0.2mm Repeatability
LINKERBOT Linker Hand L6 Robot Hand, 6 DoF, CAN, Linkage Drive, 50N Grasp, ±0.2mm Repeatability
LINKERBOT
Couldn't load pickup availability
Overview
LINKERBOT Linker Hand L6 is a dexterous Robot Hand designed for precise manipulation. It features 6 degrees of freedom (DoF) and 11 joints (6 active + 5 passive) with a linkage transmission and CAN control interface. The structure shown in the product images highlights all‑metal fingers, wear‑resistant silicone on fingertips, five‑finger tactile pressure sensors, indicator lights, an anti‑pinch half‑palm rubber pad, and a high‑precision electric cylinder direct drive.
Key Features
- 6 DoF dexterous manipulation; 11 joints (6 active + 5 passive).
- Linkage transmission with CAN bus control.
- Repeat positioning accuracy: ±0.2mm.
- Force capability: maximum tip force of thumb 10N; maximum tip force of four fingers 8N; maximum five‑finger grasping force 50N.
- Piezoresistive five‑finger tactile sensor array for contact/pressure measurement.
- Design elements shown: all‑metal fingers, wear‑resistant silicone tips, indicator light, anti‑pinch rubber pad.
- Compact & agile layout; multi‑sensor system (including cameras and electronic skin) and device‑cloud integration as depicted in product imagery.
For sales and technical support, contact [email protected] or visit https://rcdrone.top/.
Specifications
| Parameter | Value |
|---|---|
| Degrees of Freedom (DoF) | 6 |
| Number of Joints | 11 (6 Active + 5 Passive) |
| Transmission Mode | Linkage Transmission |
| Control Interface | CAN |
| Weight | 623.5g |
| Maximum Load | 28kg |
| Operating Voltage | DC24V±10% |
| Static Current | 0.2A |
| Average Current (No‑Load Movement) | 0.75A |
| Maximum Current | 1.4A |
| Repeat Positioning Accuracy | ±0.2mm |
| Maximum Tip Force of Thumb | 10N |
| Maximum Tip Force of Four Fingers | 8N |
| Maximum Grasping Force of Five Fingers | 50N |
Motion Performance
| Movement Part | Angle Range (°) | Movement Speed (°/s) |
|---|---|---|
| Base of Thumb | 57 | 152.82 |
| Base of Index Finger | 72.30 | 213.27 |
| Base of Middle Finger | 72.90 | 208.29 |
| Base of Ring Finger | 73.10 | 202.49 |
| Base of Little Finger | 72.60 | 201.11 |
| Tip of Thumb | 69.90 | 192.84 |
| Tip of Index Finger | 64.60 | 192.84 |
| Tip of Middle Finger | 65.10 | 185.32 |
| Tip of Ring Finger | 66.90 | 185.32 |
| Tip of Little Finger | 66.70 | 184.76 |
| Side Swing of Thumb | 80 | 235.29 |
| Opening and Closing Time | - | 0.35s |
Sensors
| Parameter | Specification |
|---|---|
| Piezoresistive Array | 6*12 |
| Sensor Force‑Bearing Area | 9.6*14.4mm |
| Trigger Force | 5g |
| Measurement Range | 20N |
| Service Life | 100,000 Cycles |
| Communication Frame Rate | 200FPS |
| Value Range | 0~4095 |
Appearance Dimensions
| Definition | Parameter (mm) |
|---|---|
| Length from middle finger tip to palm base | 190.7 |
| Maximum palm width | 121 |
| Length from thumb tip to palm base | 134.3 |
| Wrist height | 9.5 |
| Wrist diameter | 60 |
What’s Included
- USB‑to‑CAN debugging cable x1
- Connector cable XT30 (2+2) x1
- Power adapter x1
- Power cable x1
- Linker Hand L6 x1
Applications
- Precision grasping and object handling
- Tool gripping and manipulation
- Component pick‑and‑place tasks
Manuals
Linker Hand L6 Product Manual (PDF)
Details


High-performance dexterous robotic hand with 6 degrees of freedom. Features compact agility, multi-sensor system, and device-cloud integration for precise control, environmental adaptation, and code-free customization via cloud skill library.



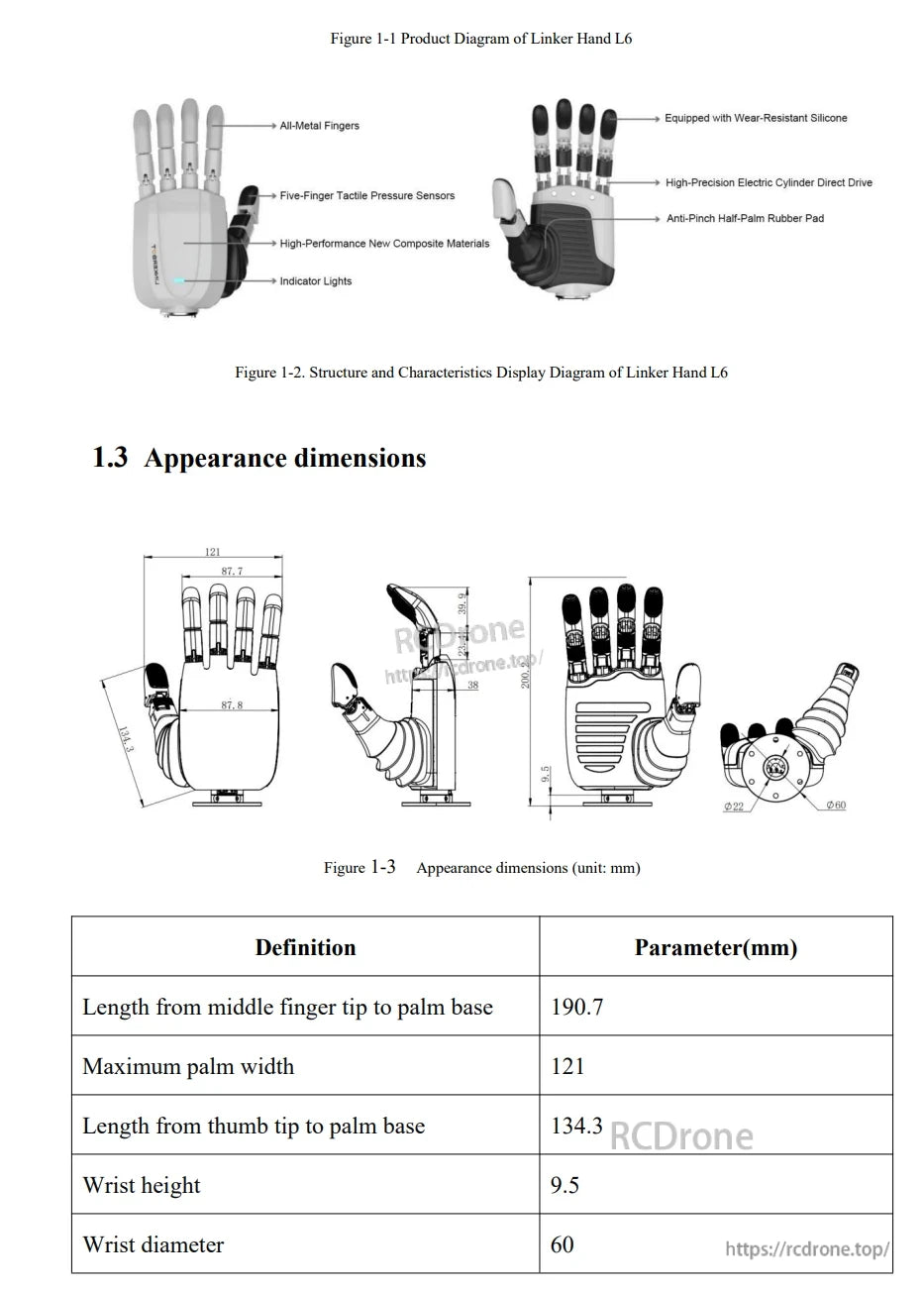
Linker Hand L6 has all-metal fingers, tactile sensors, wear-resistant silicone, electric cylinder drive, and anti-pinch rubber pad. Finger length: 190.7mm; palm width: 121mm; wrist diameter: 60mm.
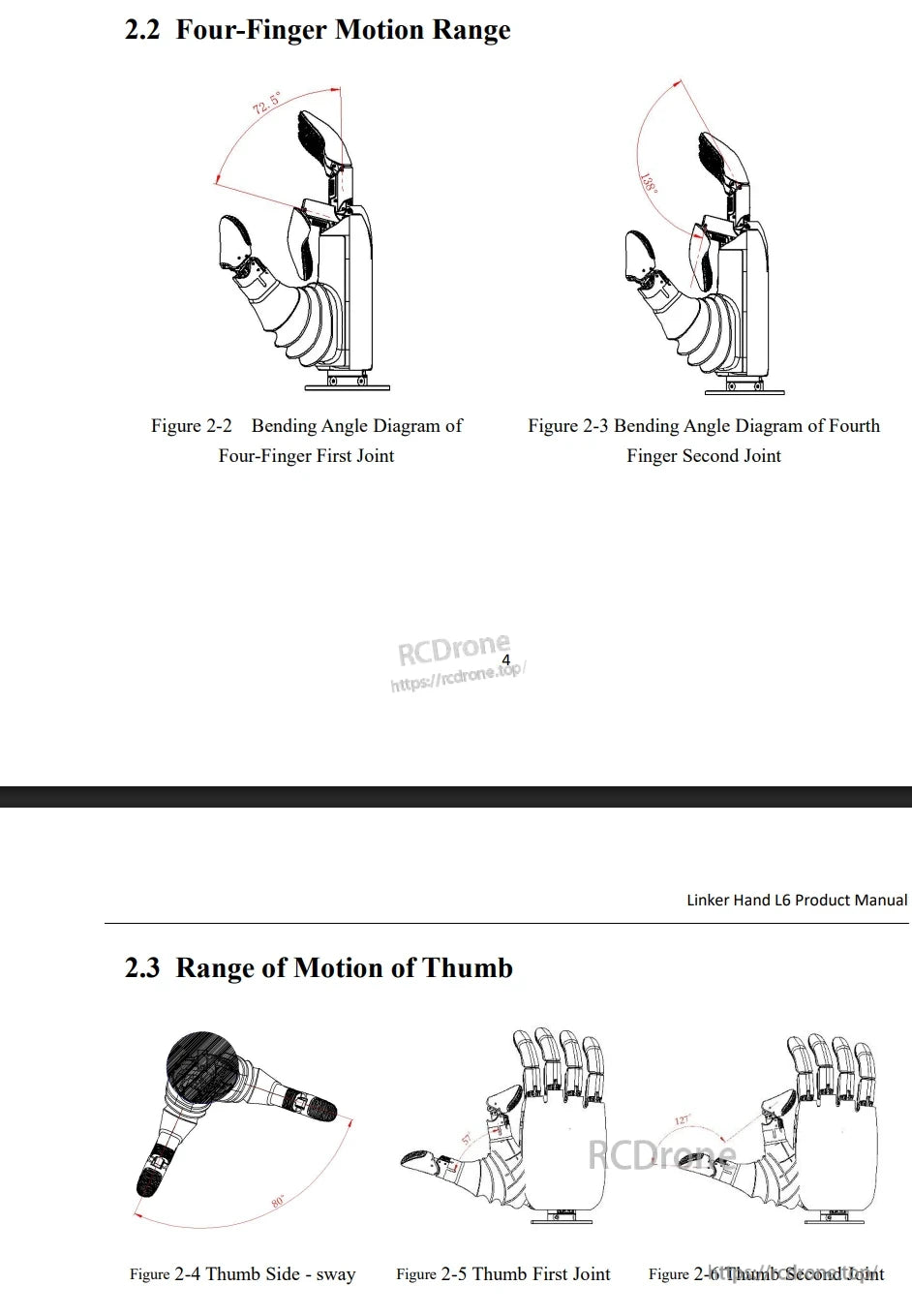
Finger and thumb joint motion ranges: four-finger first joint 72.5°, second joint 138°; thumb side-sway 80°, first joint 57°, second joint 127°.
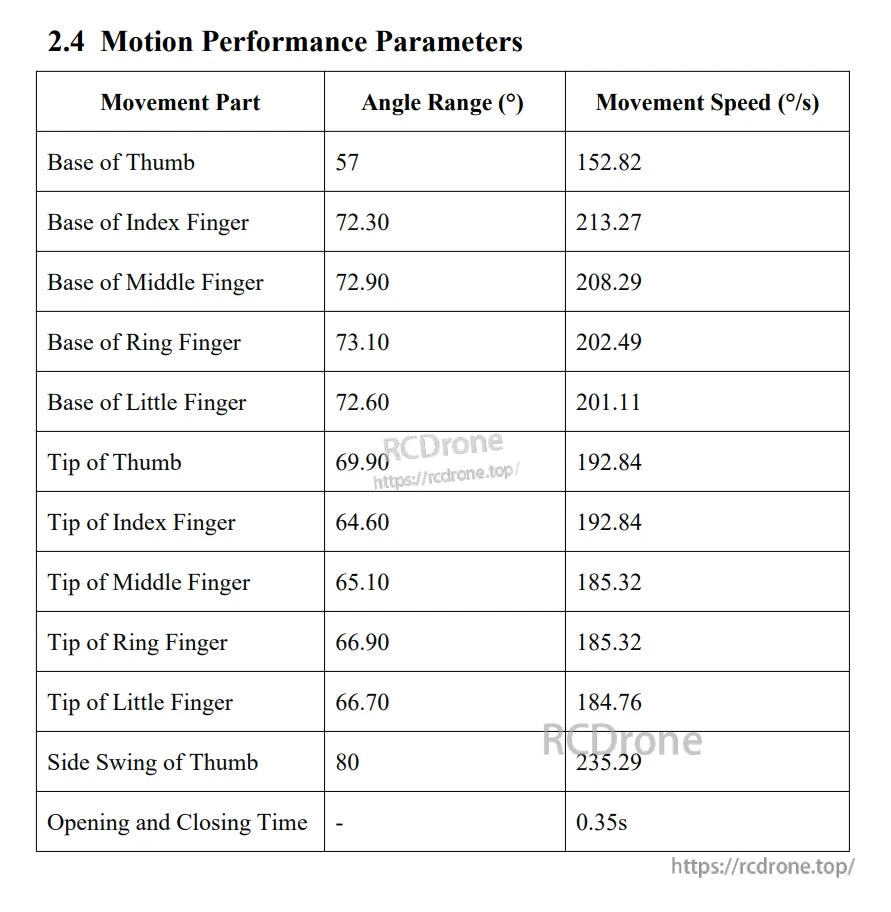
Robotic hand finger motion parameters: thumb swing at 235.29°/s, opening/closing in 0.35 seconds—showcasing precise articulation with detailed joint angle ranges and speeds.
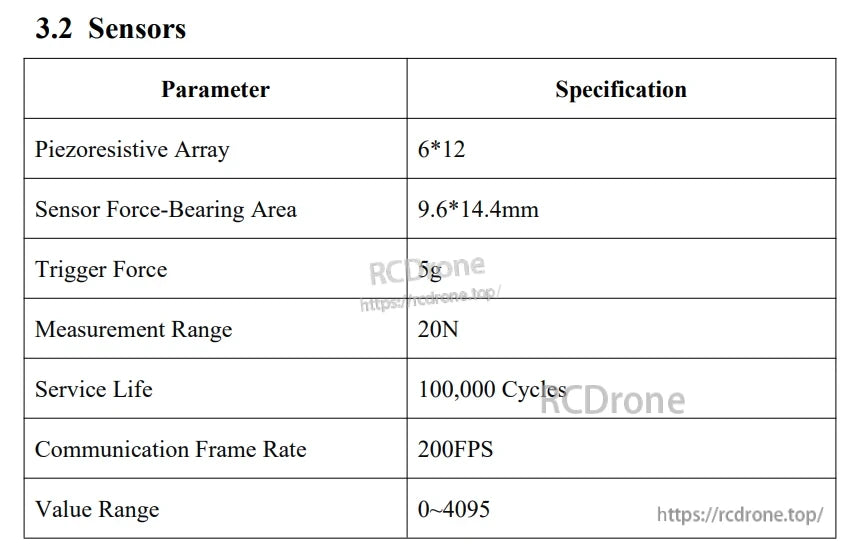
Sensor specs: 6x12 array, 9.6x14.4mm area, 5g trigger, 20N range, 100k cycles, 200FPS, 0-4095 value range.
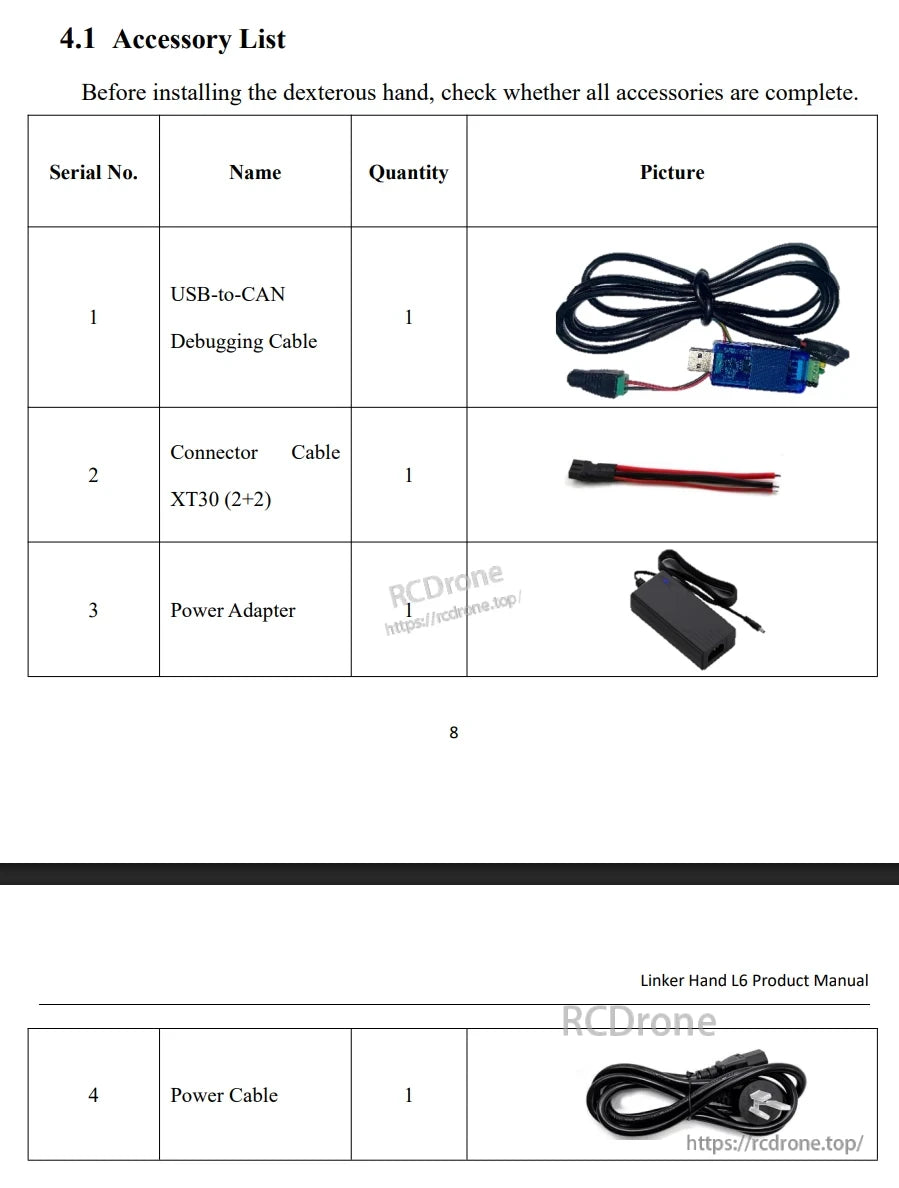
Accessory list for Linker Hand L6: USB-to-CAN cable, XT30 connector, power adapter, and power cable. Verify completeness before installation.
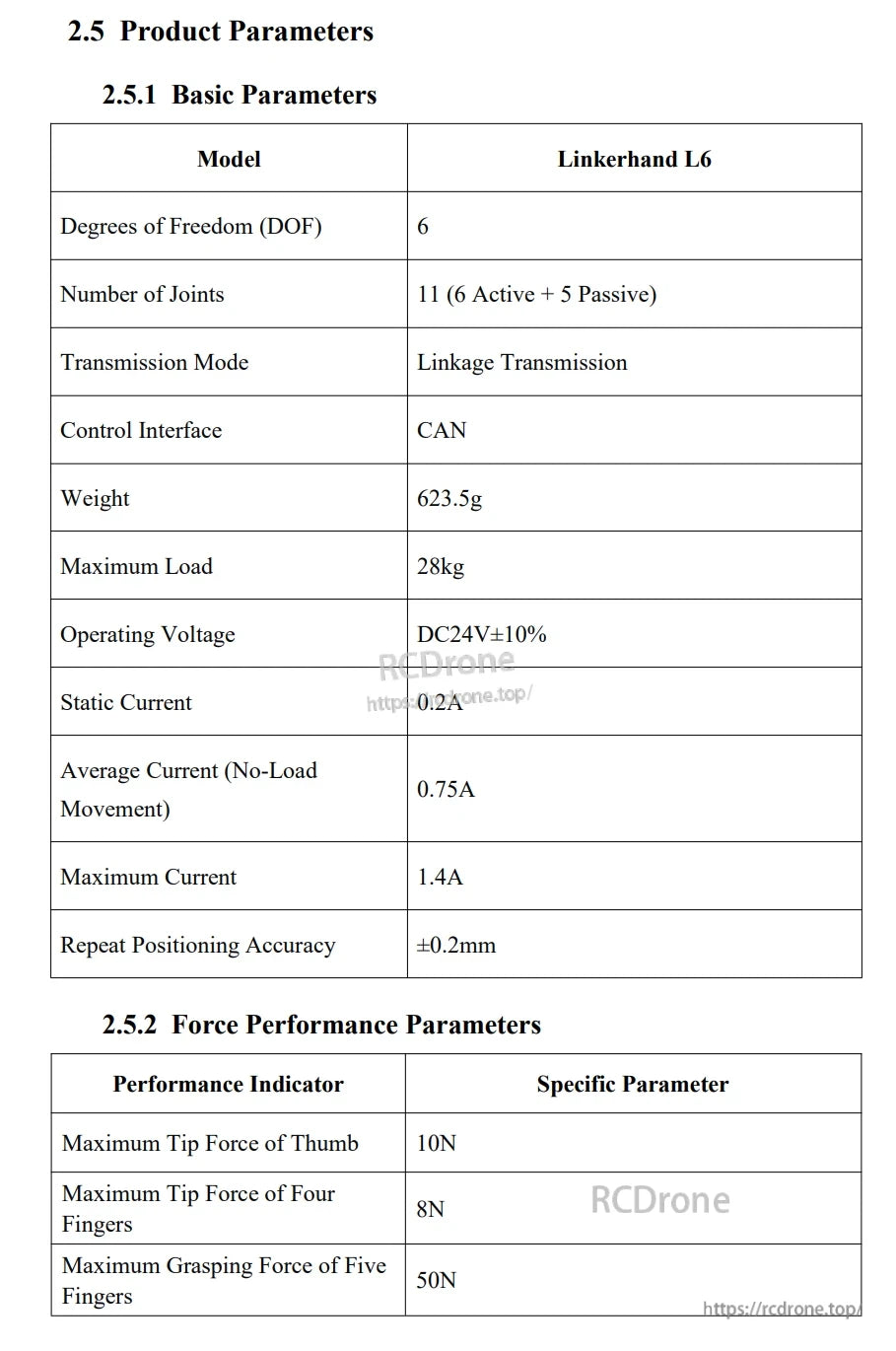
The Linkerhand L6 robot hand has 6 DOF, 11 joints, CAN control, weighs 623.5g, handles 28kg max load, runs on DC24V±10%, offers ±0.2mm precision, and delivers up to 50N grasping force.
Related Collections







