







LINKERBOT Linker Hand O6 Robot Hand, 6 DoF, 11 joints, CAN/RS485, 130N grip, ±0.2mm accuracy, DC24V±10%
LINKERBOT Linker Hand O6 Robot Hand, 6 DoF, 11 joints, CAN/RS485, 130N grip, ±0.2mm accuracy, DC24V±10%
LINKERBOT
Couldn't load pickup availability
Overview
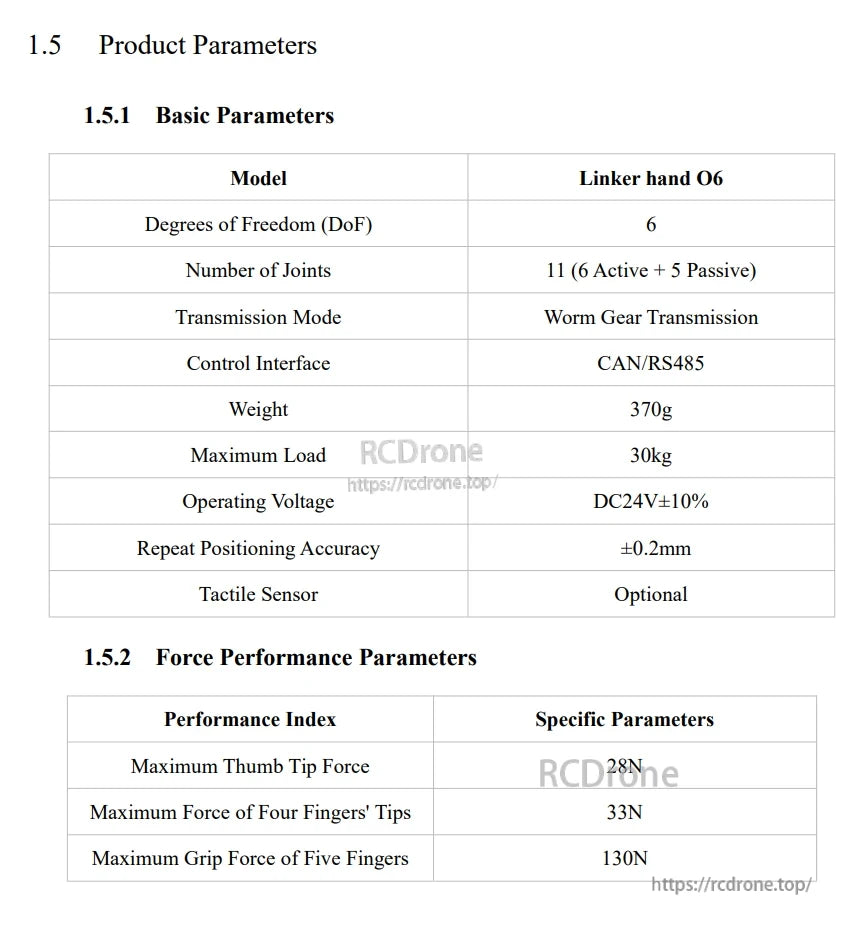
LINKERBOT Linker Hand O6 is a robot hand designed for compact integration and precise manipulation. It provides 6 DoF with 11 joints (6 active + 5 passive), worm gear transmission for stable actuation, CAN/RS485 control, and optional tactile sensing. The dexterous structure delivers up to 130N five-finger grip force with ±0.2mm repeat positioning accuracy at DC24V±10% operating voltage. Lightweight 370g construction and small footprint support logistics handling, industrial assembly, and irregular-shaped grasping scenarios.
Key Features
Compact & Agile
Compact structural design reduces equipment load while enhancing flexibility for precise grasping in tight spaces.
High Durability
Crafted from aluminum alloy for lightweight strength and wear resistance, supporting long-term stable performance.
Device-Cloud Integration
Device–cloud integration enables quick deployment via a cloud-based skill library with simplified operation and customization.
Specifications
| Model | LINKERBOT Linker Hand O6 |
| Degrees of Freedom (DoF) | 6 |
| Number of Joints | 11 (6 Active + 5 Passive) |
| Transmission Mode | Worm Gear Transmission |
| Control Interface | CAN/RS485 |
| Weight | 370g |
| Maximum Load | 30kg |
| Operating Voltage | DC24V±10% |
| Repeat Positioning Accuracy | ±0.2mm |
| Tactile Sensor | Optional |
| Maximum Thumb Tip Force | 28N |
| Maximum Force of Four Fingers' Tips | 33N |
| Maximum Grip Force of Five Fingers | 130N |
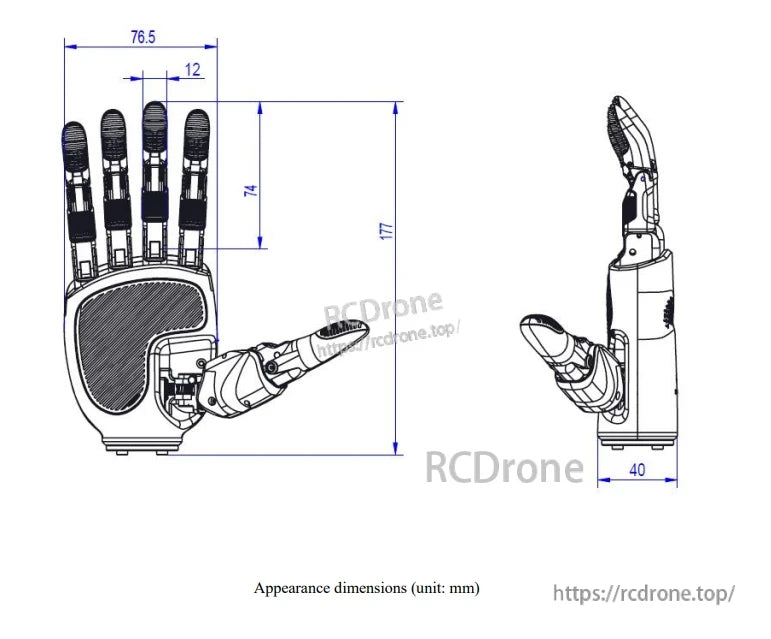
| Dimensions (Appearance) | Height 177mm; Width 76.5mm; Thickness 40mm |
Range of Motion
| LF2, RF2, MF2, FF2 (Bending) | 90° |
| LF1, RF1, MF1, FF1 (Bending) | 80° |
| THUMB1 (Bending) | 55° |
| THUMB2 (Bending) | 30° |
| THUMB3 (Side - sway) | 88° |
What’s Included
- USB-to-CAN Debugging Cable ×1
- Connector Cable XT30 (2+2) ×1
- Power Adapter ×1
- Power Cable ×1
- Linker Hand O6 x1
For sales or technical support, contact [email protected] or visit https://rcdrone.top/.
Applications
- Logistics handling and material transfer
- Industrial assembly and tool manipulation
- Stable grasping of irregular shapes and consumer items
Manuals
Linker_Hand_O6_Product_Manual.pdf
Details

Linker Hand O6 offers 6 active and 5 passive joints for precise, strong grip. Compact, durable aluminum design suits logistics, assembly, and irregular grasping. Features cloud integration for easy AI training without coding.


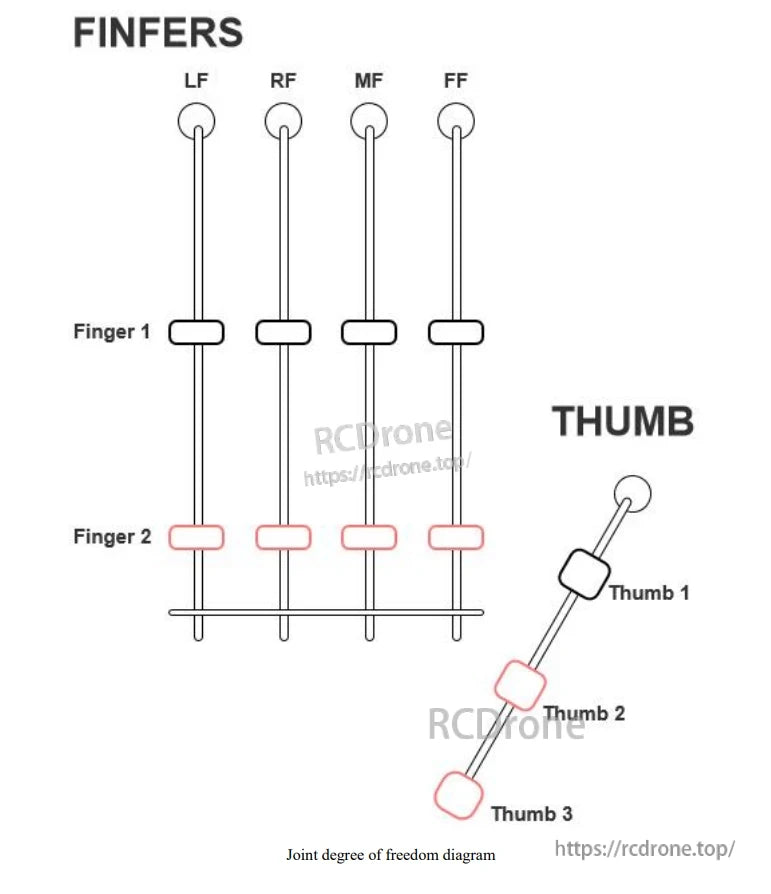
Fingers and thumb joint degrees of freedom diagram
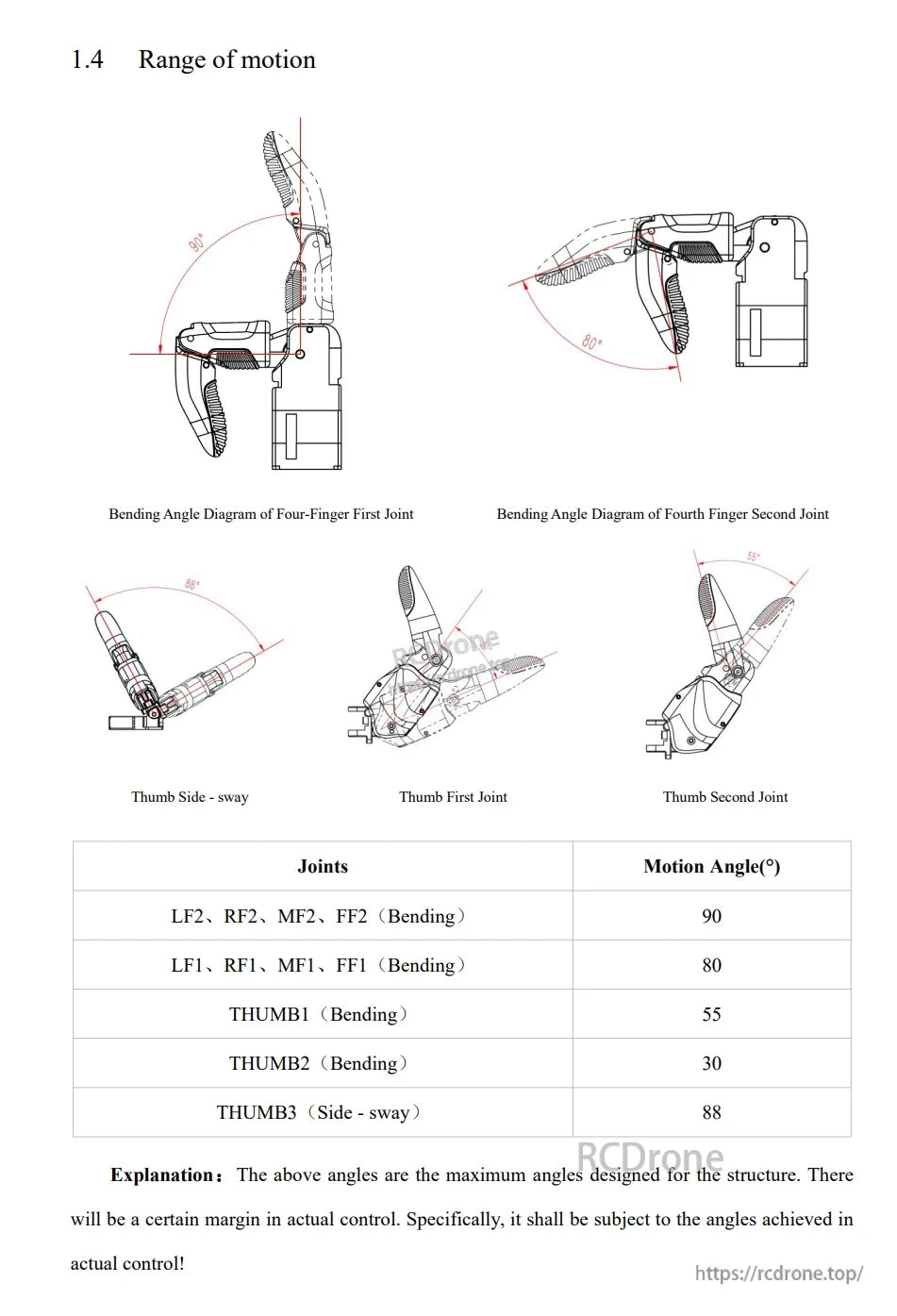
Fingers bend 80–90°, thumb bends 30–55°, and side-sway reaches 88°. These are designed maximum angles; actual control may vary slightly.
The Linker Hand O6 robot hand has 6 DoF, 11 joints, worm gear transmission, CAN/RS485 control, weighs 370g, handles 30kg max load, operates at DC24V±10%, ±0.2mm accuracy, and offers optional tactile sensors with specified force performance.

Accessory list for dexterous hand installation: USB-to-CAN cable, XT30 connector, power adapter, and power cable—all quantities one.
Related Collections







