Matek AP Periph CAN Node CAN-G474 DroneCAN Adapter Board, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph CAN Node CAN-G474 DroneCAN Adapter Board, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
Regular price
$39.00 USD
Regular price
Sale price
$39.00 USD
Unit price
per
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Overview
This AP Periph CAN Node, the Matek AP Periph CAN Node CAN-G474, is an ArduPilot AP_Periph adapter node designed to add peripherals to a DroneCAN bus using a 5Mbit/s CAN transceiver and an STM32G474 MCU. It enables ArduPilot-supported sensors and GPIO-based peripherals (such as PWM outputs and LED notify modules) to be integrated through DroneCAN.
Key Features
- Adapter node based on ArduPilot AP_Periph firmware
- STM32G474CE MCU with 512KB Flash
- CANFD-capable hardware with CAN/CANFD support from 1Mbit ~ 5Mbit
- 2x CAN bus
- 4x UARTs for GNSS, Rangefinder, Proximity, EFI, RC input (receiver); MSP enabled on TX3 by default for GNSS, Compass, Barometer over MSP
- 2x I2C bus for I2C peripherals (Airspeed sensor, Barometer, Compass)
- 1x SPI for RM3100 (SPI pads on bottom side with “CS, MOSI, MISO, SCK” silkprint)
- 11x PWM outputs for Servos and ESC; all PWMs support DMA/DShot (PWM1-10 on DuPont 2.54mm holes; PWM11 pad on bottom side with “11” silkprint)
- Firmware update support via DroneCAN GUI Tool / Mission Planner (DroneCAN Tab) and via STM32CubeProgrammer DFU mode (UART1)
Specifications
| MCU | STM32G474CE |
| Flash | 512KB |
| CAN transceiver data rate | Up to 5Mbit/s |
| CAN / CANFD support | 1Mbit ~ 5Mbit CAN/CANFD |
| CAN bus | 2x |
| UART | 4x (MSP enabled on TX3 by default) |
| I2C | 2x |
| SPI | 1x (for RM3100) |
| PWM outputs | 11x (PWM1-10 on DuPont 2.54mm holes; PWM11 pad on bottom side) |
| Debug | ST debug, SWC & SWD (on bottom side) |
| Firmware update (DFU) | UART1 (TX1, RX1) |
| LED indicators | Blue fast blinking: Booting; Blue slow blinking: communicating with flight controller; Red: 3.3V indicator |
| Input voltage range | 4.5~5.5V @5V pad/pin |
| Power consumption | 62mA |
| Operating temperatures | -30~85 °C |
| Connectors | 5x JST-GH-4P (SM04B-GHS-TB) for CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) for UART3+I2C2 |
| Through-holes | 18x DuPont 2.54mm holes |
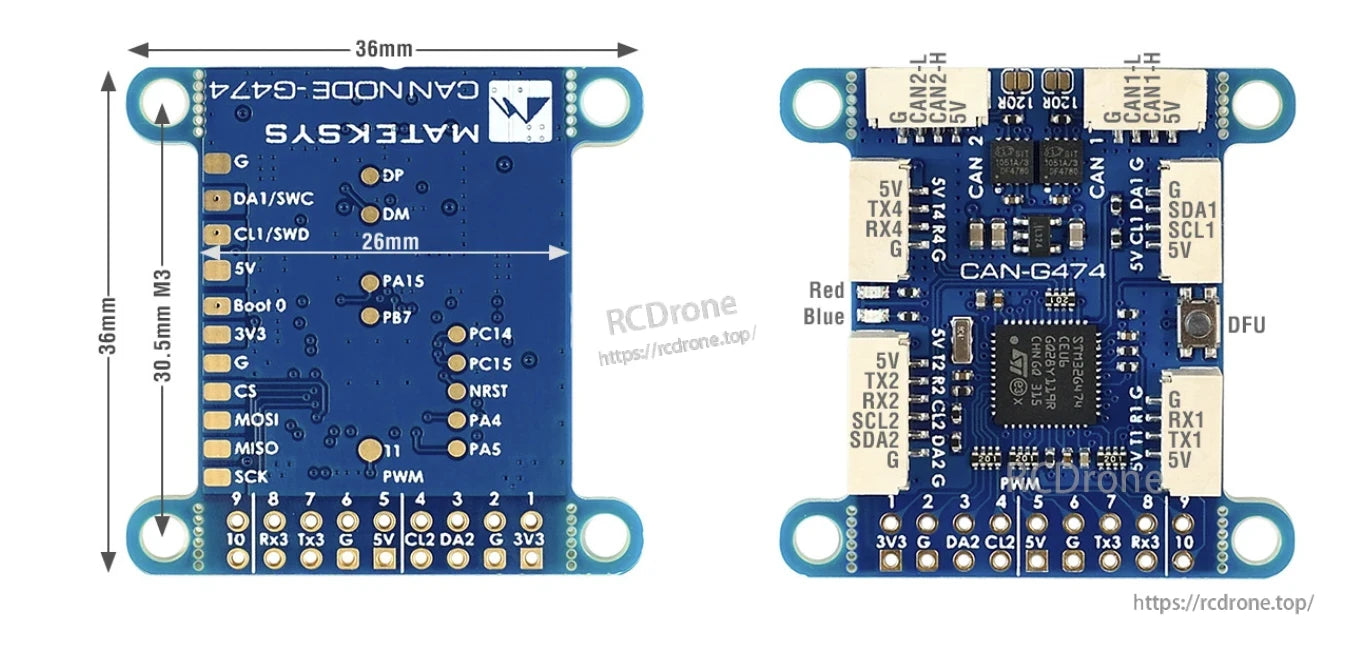
| Board size | 36mm*36mm*6mm |
| Weight | 5.2g |
| Mounting | 30.5mm 4x Dia.3mm |
What’s Included
- 1x CAN-G474 board
- 2x JST-GH-4P to JST-GH-4P 20cm silicon wire
- 1x JST-GH-6P to JST-GH-6P 20cm silicon wire
Customer service: https://rcdrone.top/ or [email protected]
Applications
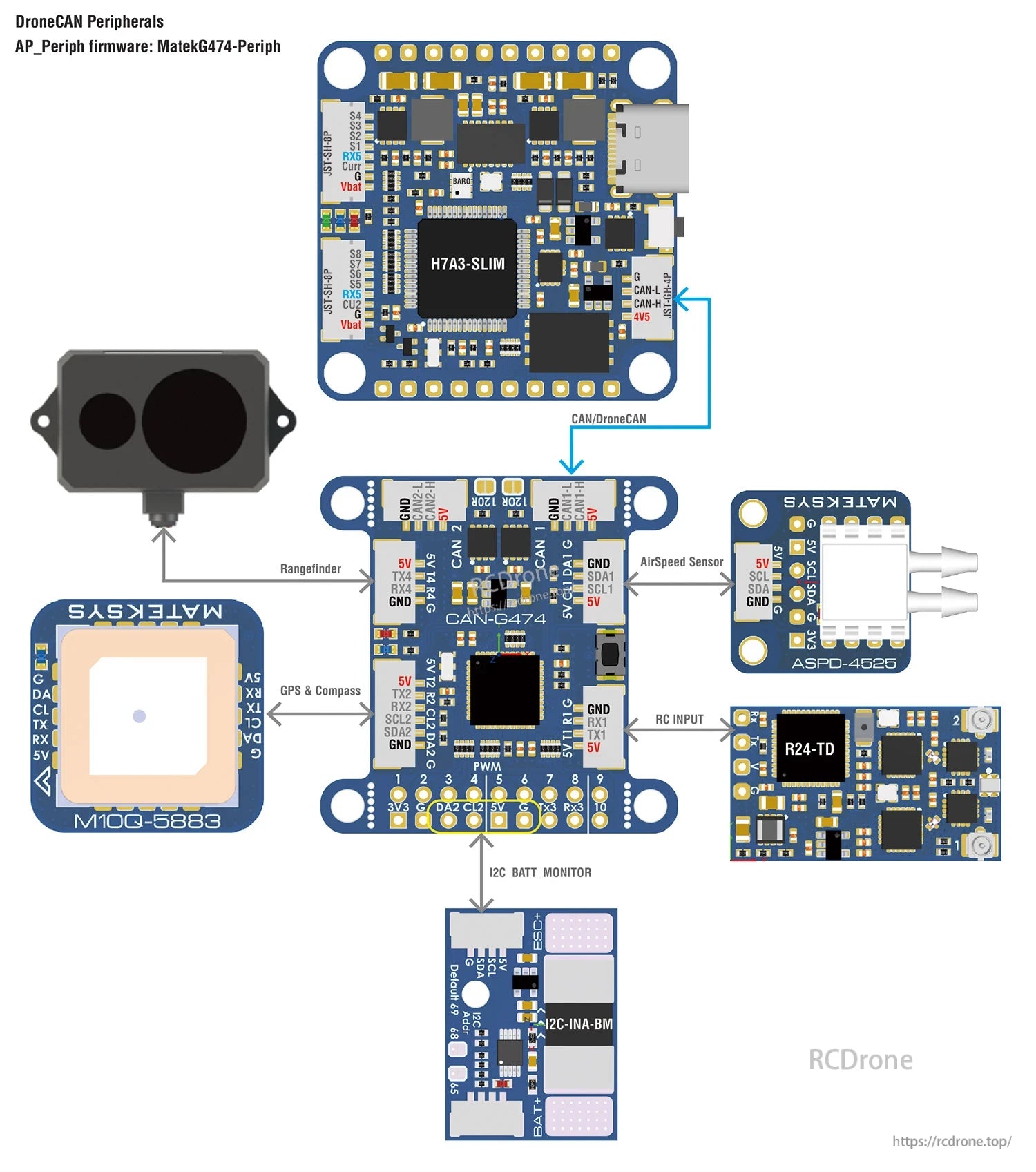
- Convert ArduPilot-supported peripherals to DroneCAN bus peripherals (GNSS, Compass, Barometer, Airspeed sensor, Rangefinder, Proximity sensor, Electronic Fuel Injectors)
- GPIO-based peripherals on DroneCAN, including PWM and LED notify modules
- Example peripheral connections shown: Rangefinder, GPS & Compass, AirSpeed Sensor, RC INPUT, I2C BATT_MONITOR
- Redundancy option: connect either one CAN bus to the flight controller, or connect both
Manuals
- Firmware downloads (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (for peripheral sensors)
- MatekG474-DShot (for DroneCAN-PWM output)
- Update methods
- DroneCAN GUI Tool or Mission Planner – DroneCAN Tab, load “AP_Periph.bin”
- STM32CubeProgrammer DFU mode: connect USB-TTL module to UART1, plug USB while holding the DFU button, load “AP_Periph_with_bl.hex”
- 3D file: CAN-G474_STEP.zip
- Tutorial: Using MatekL431 adapters for PWM and DShot
Details
The Matek CAN-G474 board provides a DroneCAN/CAN port alongside UART, I2C, and PWM pads for connecting common autopilot peripherals.
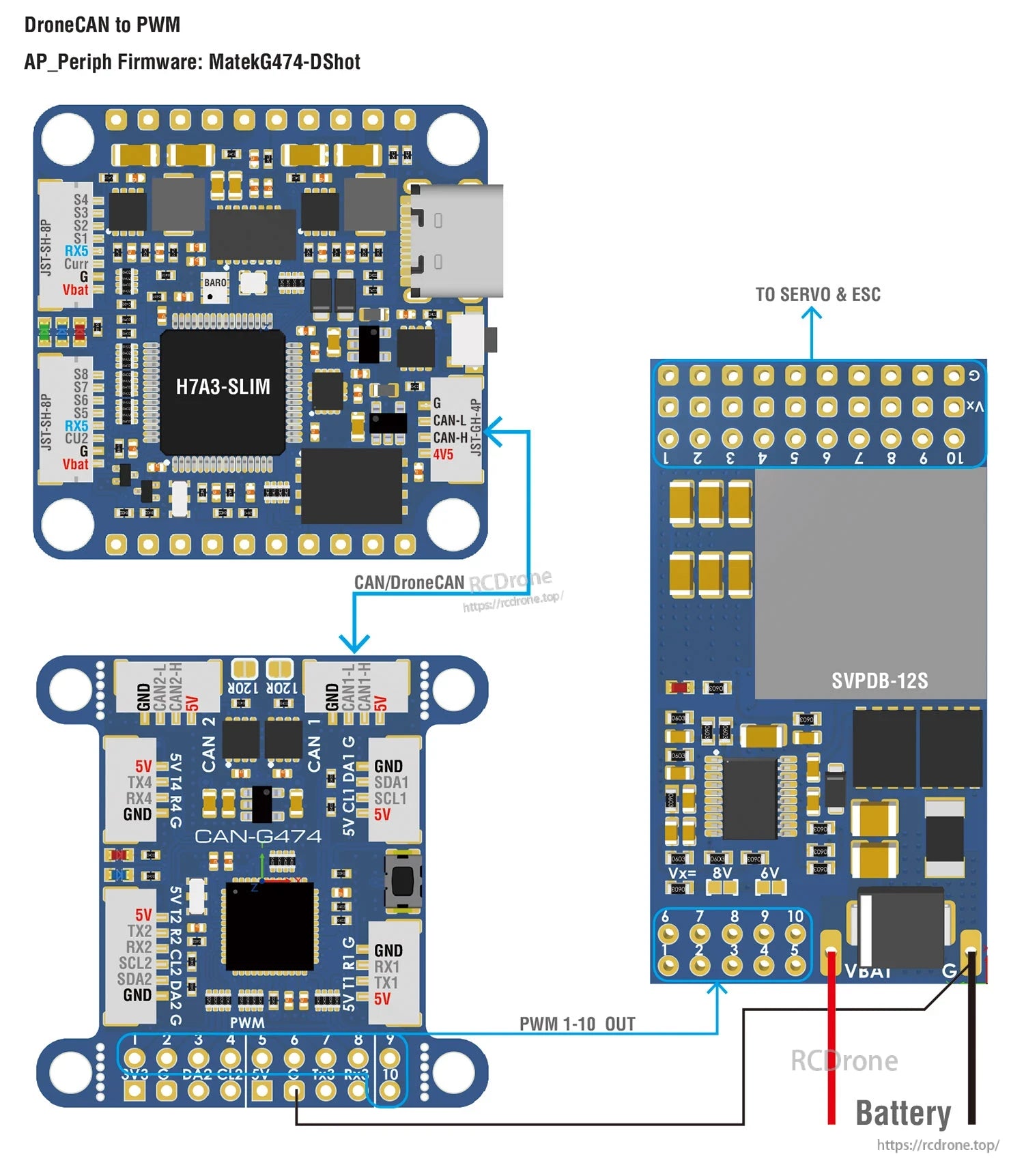
The Matek CAN-G474 board connects to a CAN/DroneCAN bus and breaks out up to 10 PWM outputs for servos or ESCs.