MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DIGITAL POWER MONITOR
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DIGITAL POWER MONITOR
MATEKSYS
Couldn't load pickup availability
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DIGITAL POWER MONITOR SPECIFICATIONS
Use: Vehicles & Remote Control Toys
Recommend Age: 12+y,14+y
Origin: Mainland China
Material: Composite Material
Brand Name: MATEKSYS
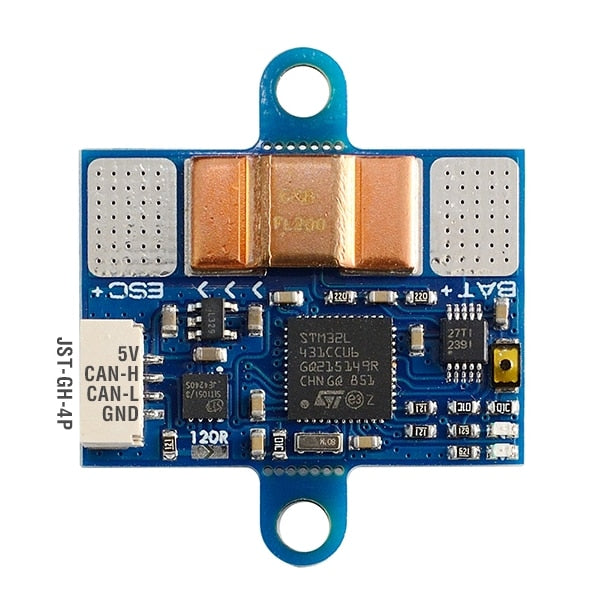
AP_PERIPH CAN DIGITAL POWER MONITOR, CAN-L4-BM
Current 0~204.8A, Voltage 0~85V, CAN/DroneCAN protocol
-
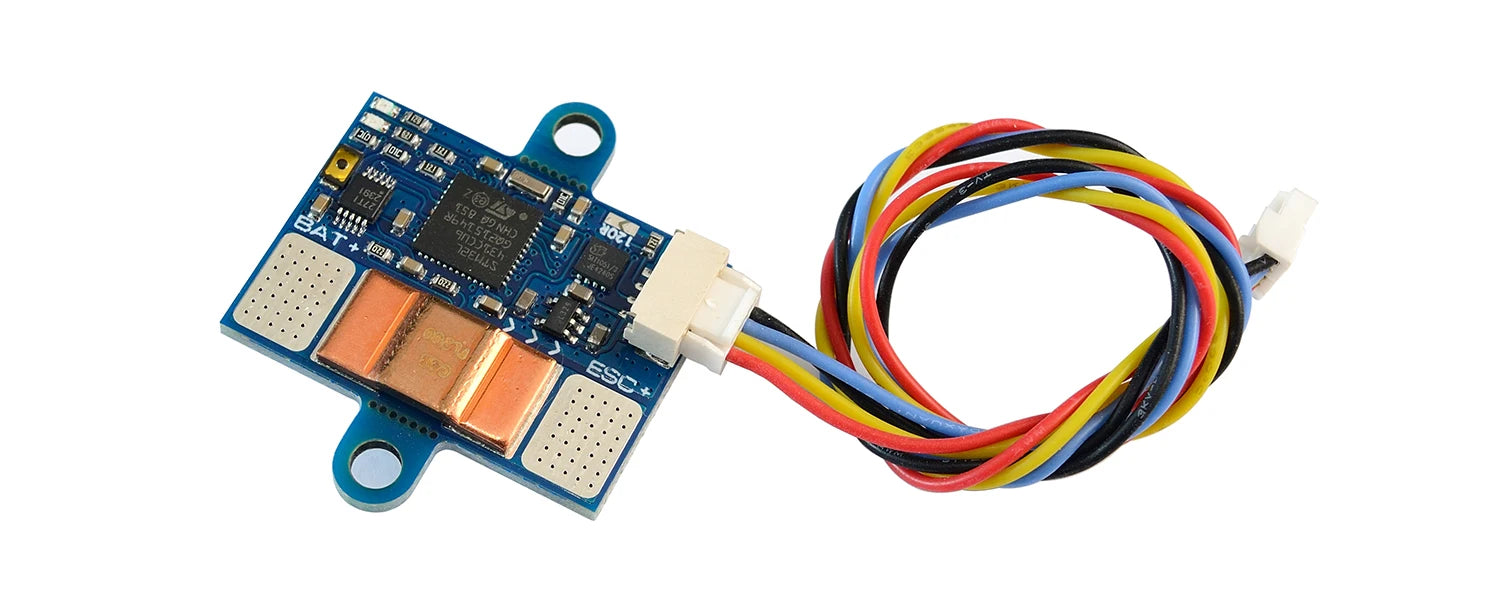
CAN-L4-BM is a ultra-precise digital power monitor based on TI INA239 & ArudPilot AP_Periph firmware.
-
The resistance of this conductive path is 200 μΩ typical, providing low power loss in the application.
-
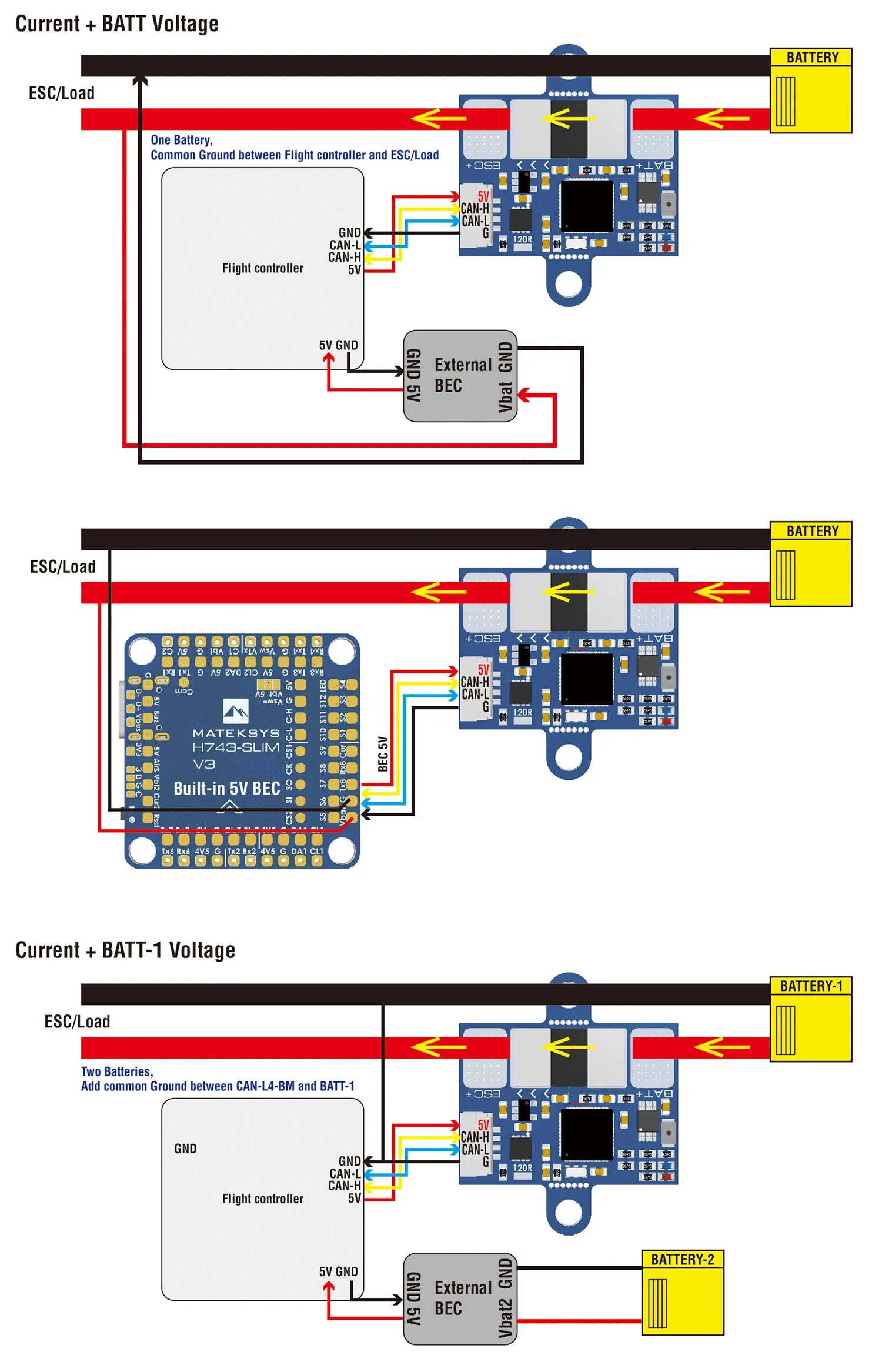
With this device, No calibration required, flight controller that support DroneCAN protocol can easily get accurate current & bus voltage readouts via CAN bus.
Specifications
-
MCU: STM32L431xC, 256KB Flash
-
INA239 85-V, 16-Bit, High-Precision Power monitor IC With SPI Interface
-
Battery Voltage sense input: 0~85V
-
Current Sense Range: 0~204.8A
-
Load current on current sensing resistor: 150A(Continuous), 204.8A(Burst)
-
Voltage accuracy: ± 0.1%
-
Current accuracy: ± 2%
-
Interface
-
CAN, DroneCAN Protocol
-
UART2, spare, DFU
-
ST debug, SWCLK & SWDIO
-
-
LED
-
Blue, Fast blinking, Booting
-
Blue, Slow blinking, working
-
Red, 3.3V indicator
-
Power supply for CAN-L4-BM board : 4.5~5.5V @5V pad/pin
-
Power consumption: 10mA
-
Operating Temperatures: -40~85 °C
-
Physical
-
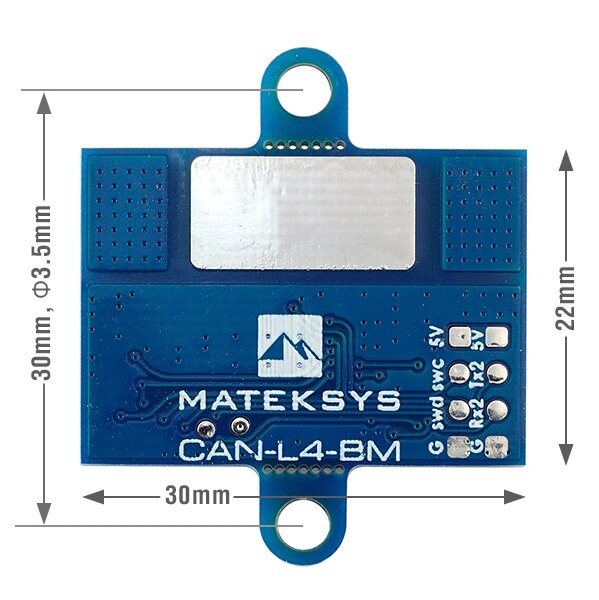
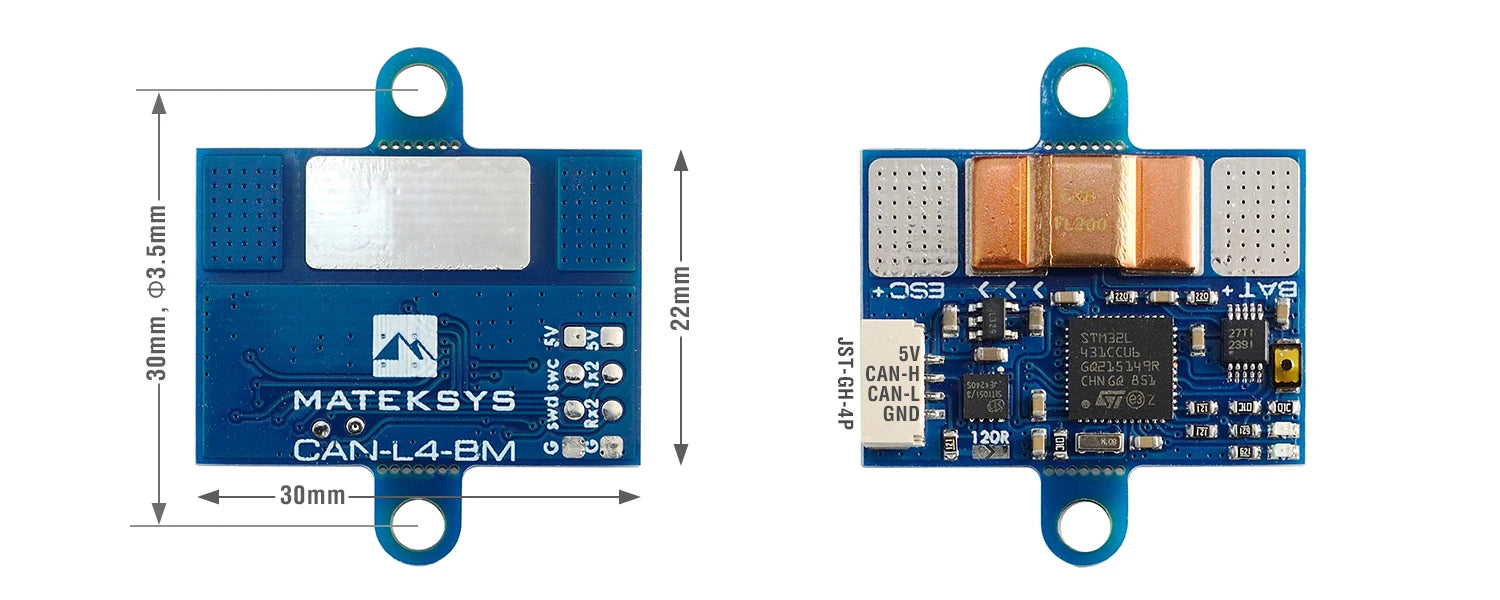
Board Size: 30mm*22mm*3mm. 4g
-
3D file : CAN-L4-BM_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-BattMon
-
Update via DroneCAN GUI Tool
-
-
Parameters
-
CAN_P1_DRIVER = 1 if attached to CAN bus1 port or CAN_P2_DRIVER = 1 if attached to CAN bus2 port
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Packing
-
1x CAN-L4-BM board
-
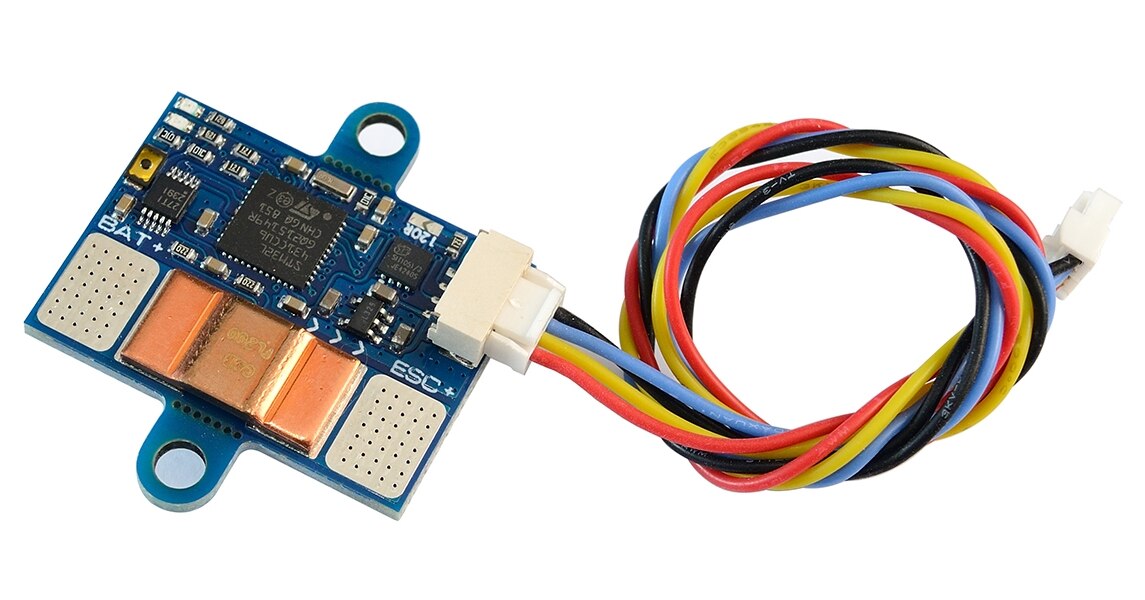
1x JST-GH-4P to JST-GH-4P 20cm silicon wire
Tips
-
The big pad on the bottom side is a dead pad. No any circuit network on it.
-
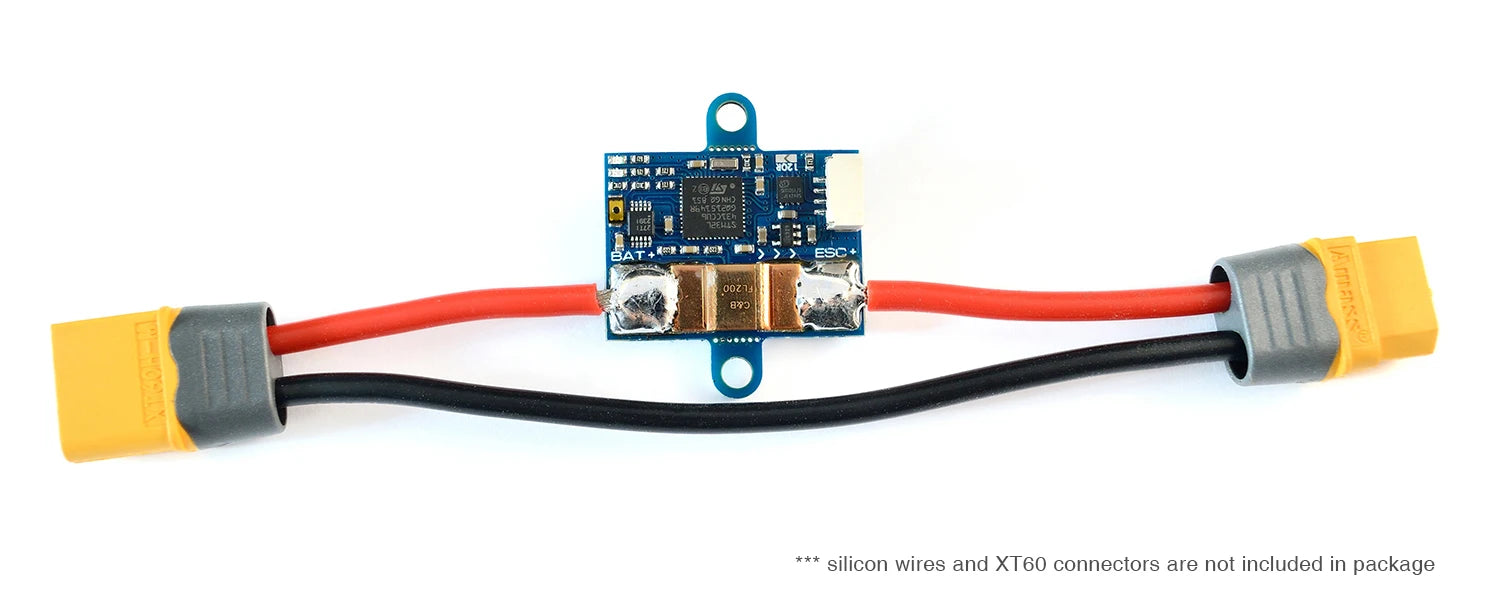
Solder the positive wires as close as possible to both sides of the current sensing resistor.
-
2 ears for mounting can be cut off if you don’t need it.
-
If the CAN wires are too long, bridge the “120R” jumper.
Related Collections