MATEKSYS CAN Magnetometer RM3100 CAN-L4-3100, ArduPilot AP_Periph DroneCAN, STM32L431
MATEKSYS CAN Magnetometer RM3100 CAN-L4-3100, ArduPilot AP_Periph DroneCAN, STM32L431
MATEKSYS
Regular price
$62.55 USD
Regular price
Sale price
$62.55 USD
Unit price
per
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Overview
The MATEKSYS AP_Periph CAN Magnetometer - RM3100 (CAN-L4-3100) is a CAN magnetometer module based on the PNI RM3100 geomagnetic sensor and ArduPilot AP_Periph firmware. It supports DroneCAN protocol and is designed to provide stable magnetic measurements over temperature with low power consumption and noise immunity.
Key Features
- Professional grade CAN magnetometer based on RM3100 and ArduPilot AP_Periph firmware
- DroneCAN protocol support on CAN interface
- UART2 MSP output (MatekL431-Periph firmware)
- UART3 interface for external GNSS module
- ST debug interface: SWCLK and SWDIO
- RM3100 sensor characteristics: high resolution, low power consumption, large signal noise immunity, large dynamic range, high sampling rates, stable over temperature, inherently free from offset drift
- On-board LED indicators (booting/working/3.3V)
For order support and technical assistance, contact [email protected] or visit https://rcdrone.top/.
Specifications
| Model / Designation | CAN-L4-3100 |
| Geomagnetic sensor | PNI RM3100 |
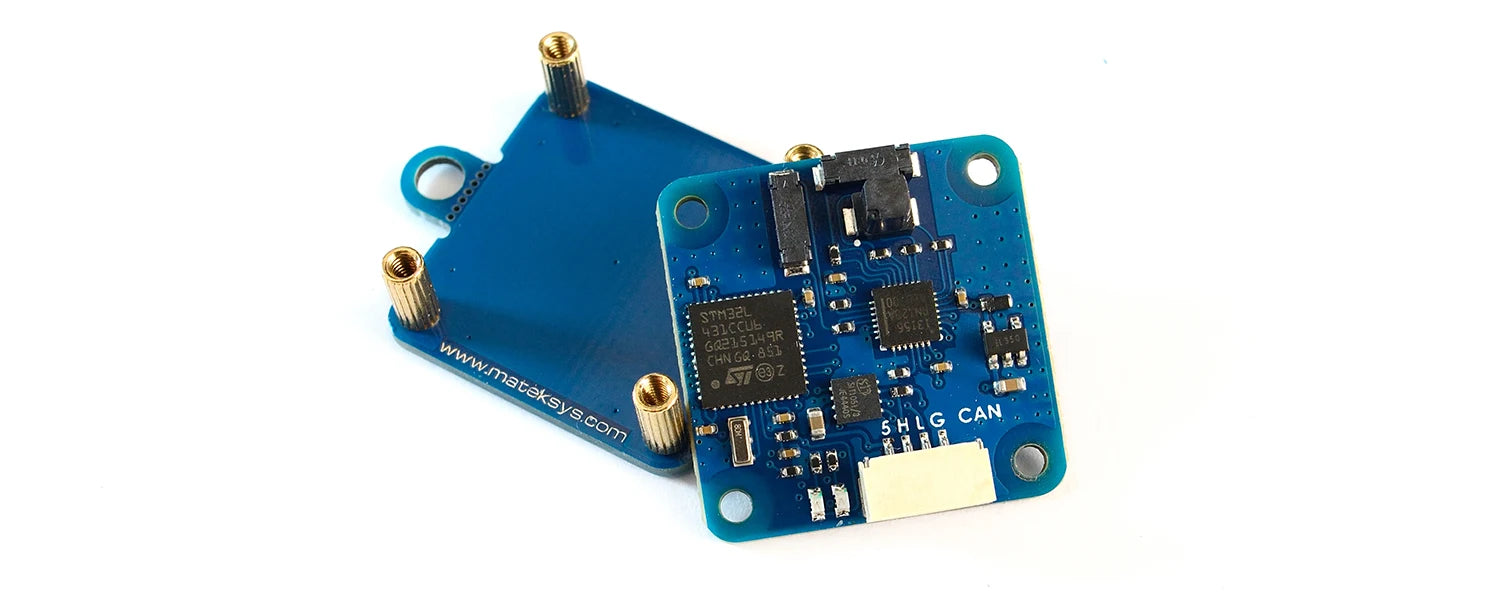
| CAN node MCU | STM32L431xC, 256KB Flash |
| CAN interface | CAN, DroneCAN Protocol |
| UART2 | MSP output (MatekL431-Periph fw) |
| UART3 | For external GNSS module |
| Debug | ST debug, SWCLK and SWDIO |
| Power supply (board) | 4.5~5.5V @5V pad/pin |
| Power consumption | 22mA |
| Operating temperature | -40~85 °C |
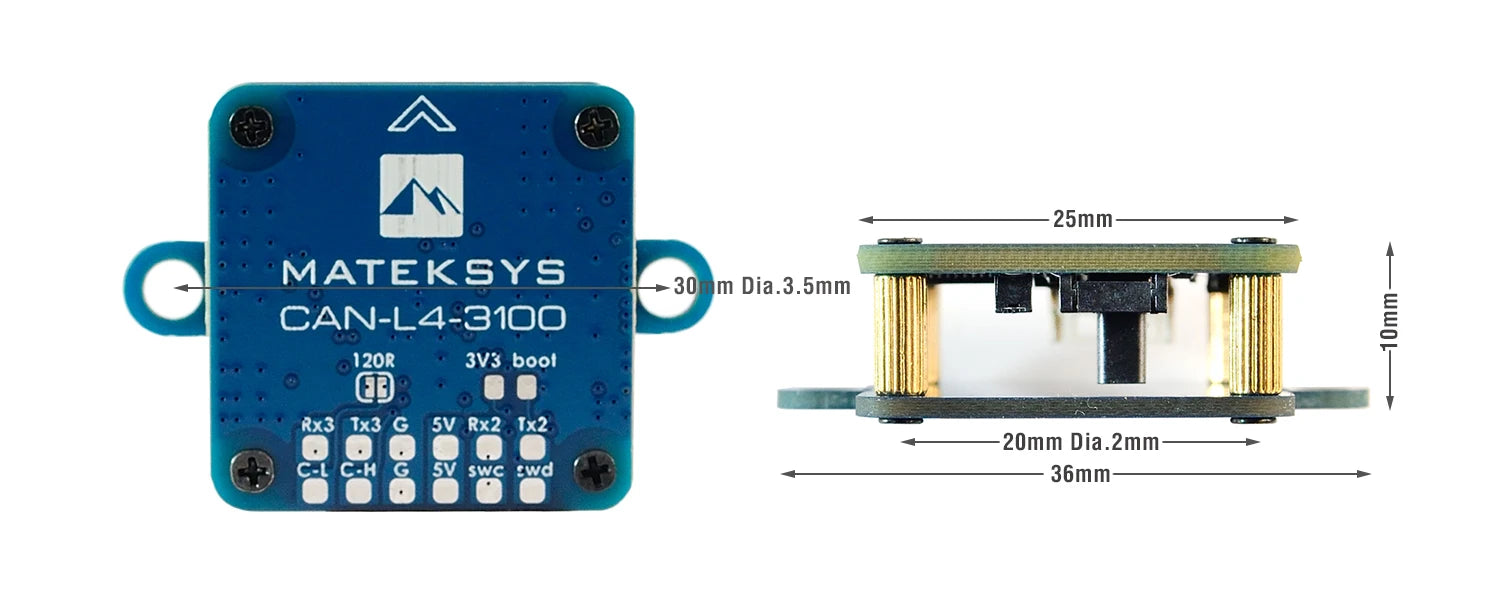
| Board size | 36mm x 25mm x 10mm |
| Weight | 6g |
| LED indicators | Blue fast blinking: Booting; Blue slow blinking: Working; Red: 3.3V indicator |
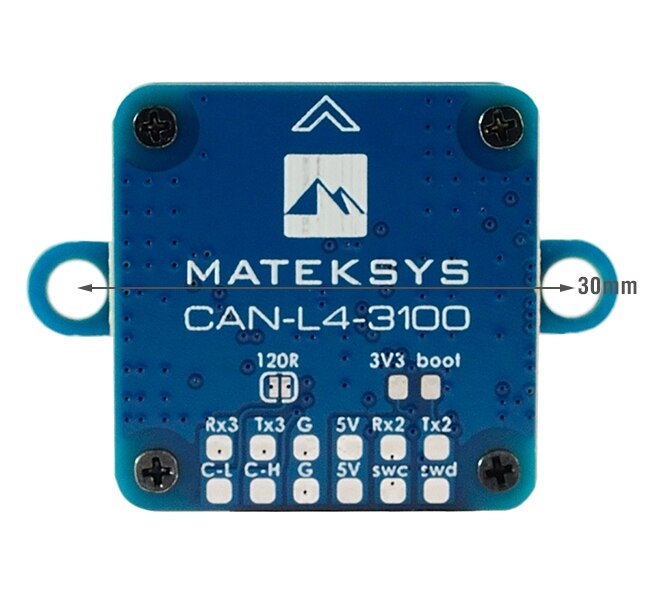
| Visible board markings (top) | MATEKSYS, CAN-L4-3100, 120R, 3V3 boot |
| Visible pad labels (top) | Rx3, Tx3, G, 5V, Rx2, Tx2, C-L, C-H, swc, swd |
| Visible connector marking (bottom) | 5 H L G CAN |
| Visible mechanical annotations (image) | 36mm; 25mm; 10mm; 30mm Dia. 3.5mm; 20mm Dia. 2mm |
Firmware
- ArduPilot AP_Periph: MatekL431-GPS or MatekL431-Periph
- Update via DroneCAN GUI Tool or Mission Planner: AP_Periph.bin
- Update via STLink: AP_Periph_with_bl.hex
Parameters
- CAN_P1_DRIVER = 1 if attached to CAN bus1 port, or CAN_P2_DRIVER = 1 if attached to CAN bus2 port
- COMPASS_AUTODEC = 1
What’s Included
- 1x CAN-L4-3100 board
- 1x JST-GH-4P to JST-GH-4P 20cm silicon wire
Applications
- DroneCAN compass / magnetometer module for ArduPilot AP_Periph systems
- MSP protocol magnetometer output via UART2
Setup Notes
- Pre-installed firmware: MatekL431-GPS
- Mount the magnetometer away from power lines/motors and iron-based material: >=10cm
- Mounting ears can be cut off if not needed
- If CAN wires are too long, bridge the 120R jumper
UART (MSP protocol) Connection
- CAN-L4-3100 5V — FC 4.0V ~ 5.3V
- CAN-L4-3100 G — FC G/GND
- CAN-L4-3100 TX2 — FC spare UART_RX
ArduPilot (since 4.1.x) FC Parameters
- Serialx_PROTOCOL = 32 (MSP), where x is the SERIAL port used for connection on autopilot
- Serialx_BAUD = 115, where x is the SERIAL port used for connection on autopilot
- COMPASS_TYPEMASK 0 (or make sure MSP bit is not checked)
INAV (since 2.6) FC Parameters
- Ports tab: Enable MSP on the corresponding UART that CAN-L4-3100 is connected to; do not enable other functions on that UART; select Baudrate 115200
- set mag_hardware = MSP
- set align_mag = CW90, if compass is mounted flat with arrow facing forward and the flight controller arrow is also facing forward
Manuals
- 3D file: CAN-L4-3100_step.zip
Details
Related Collections