MATEK Mateksys FLIGHT CONTROLLER F405-HDTE
MATEK Mateksys FLIGHT CONTROLLER F405-HDTE
MATEKSYS
Couldn't load pickup availability
MATEK Mateksys FLIGHT CONTROLLER F405-HDTE SPECIFICATIONS
Use: Vehicles & Remote Control Toys
Recommend Age: 12+y,14+y,6-12y
Origin: Mainland China
Material: Composite Material
Brand Name: MATEKSYS
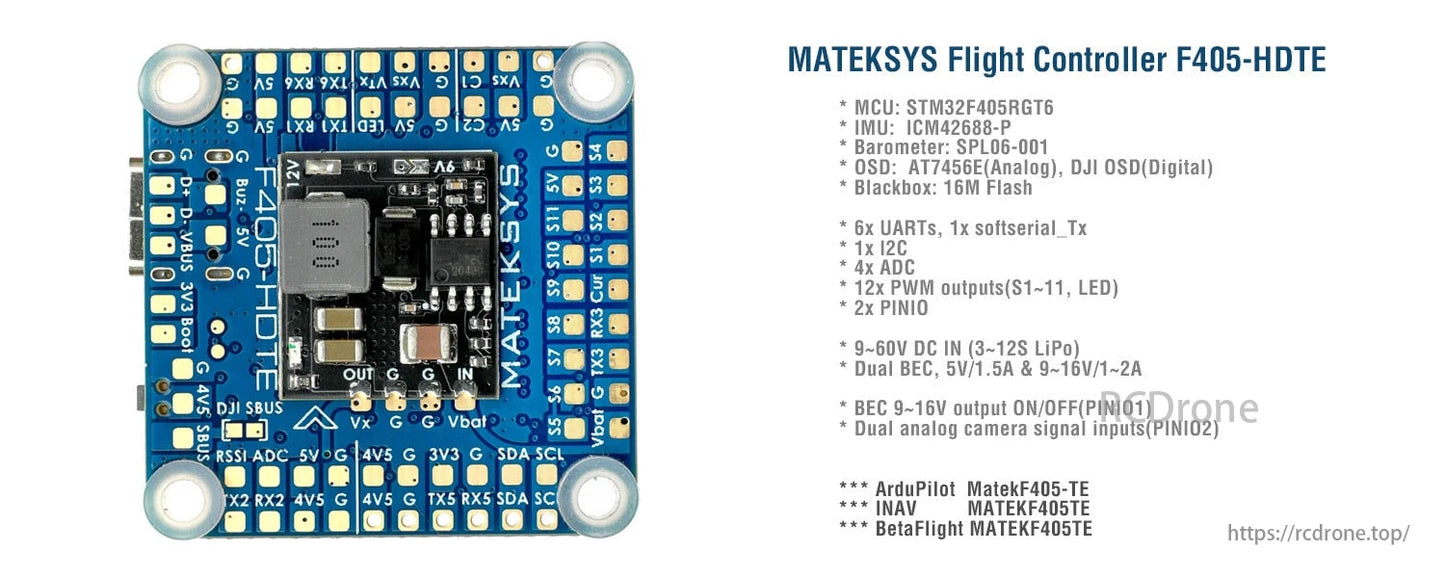
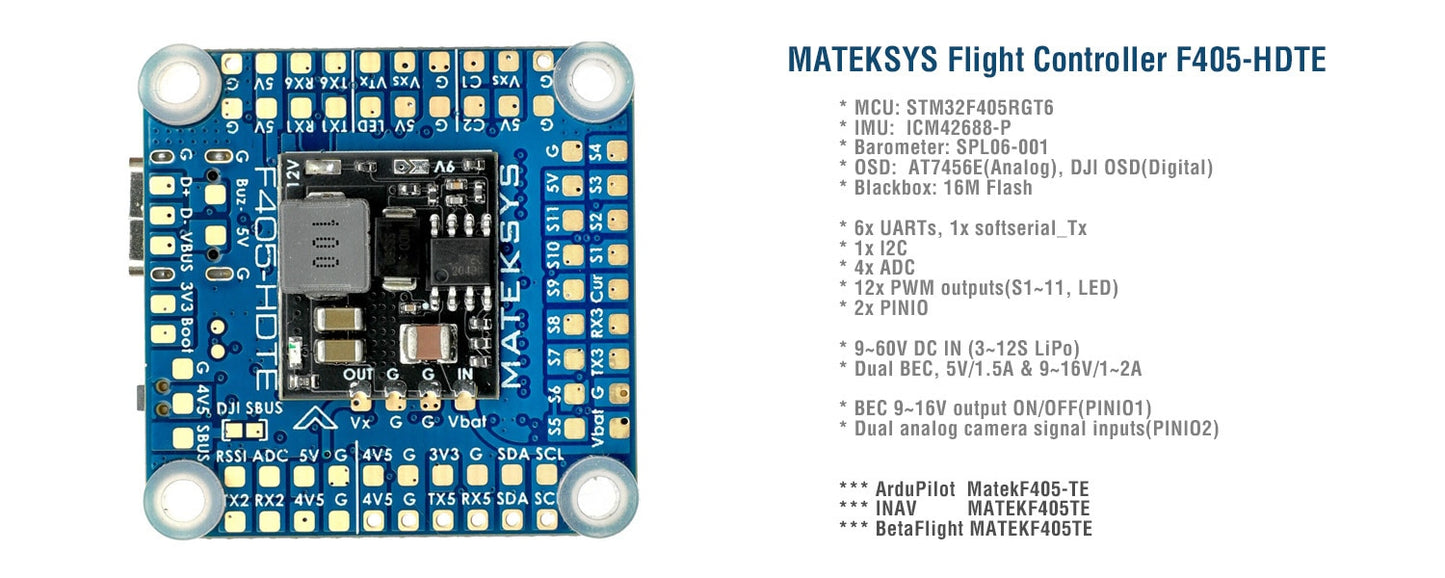
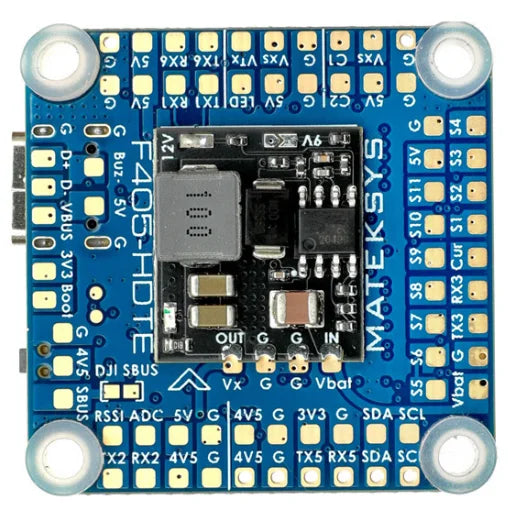
FLIGHT CONTROLLER F405-HDTE
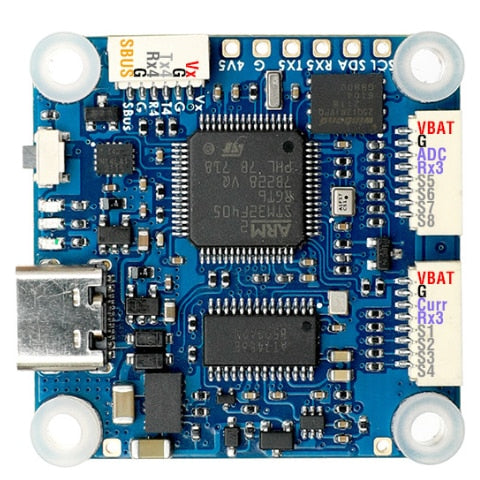
STM32F405RGT6, ICM42688-P, SPL06, OSD, 6x UARTs, 1x I2C, 12x PWM, Dual BEC, 3~12S LiPo input
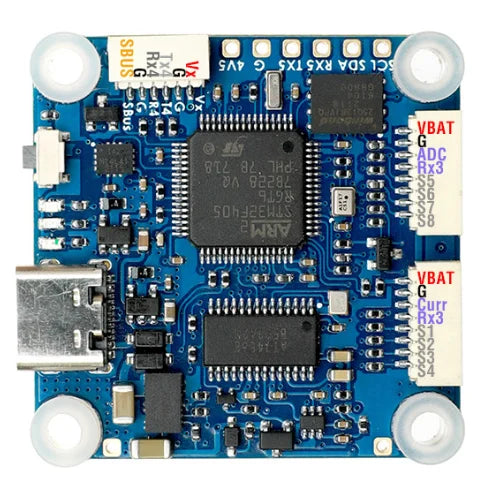
MATEKSYS Flight Controller F4O5-HDTE As 9X8 9XL XiA Sxa MCU: STM3ZFAOSRGT6 X8 [XII031 23 IMU: ICM42688-P 5 Barometer: SPLO6-001 @2]
Features
-
STM32F405 has 1MB flash which can run ArduPilot/INAV/BetaFlight
-
InvenSense the 3rd generation IMU ICM42688-P
-
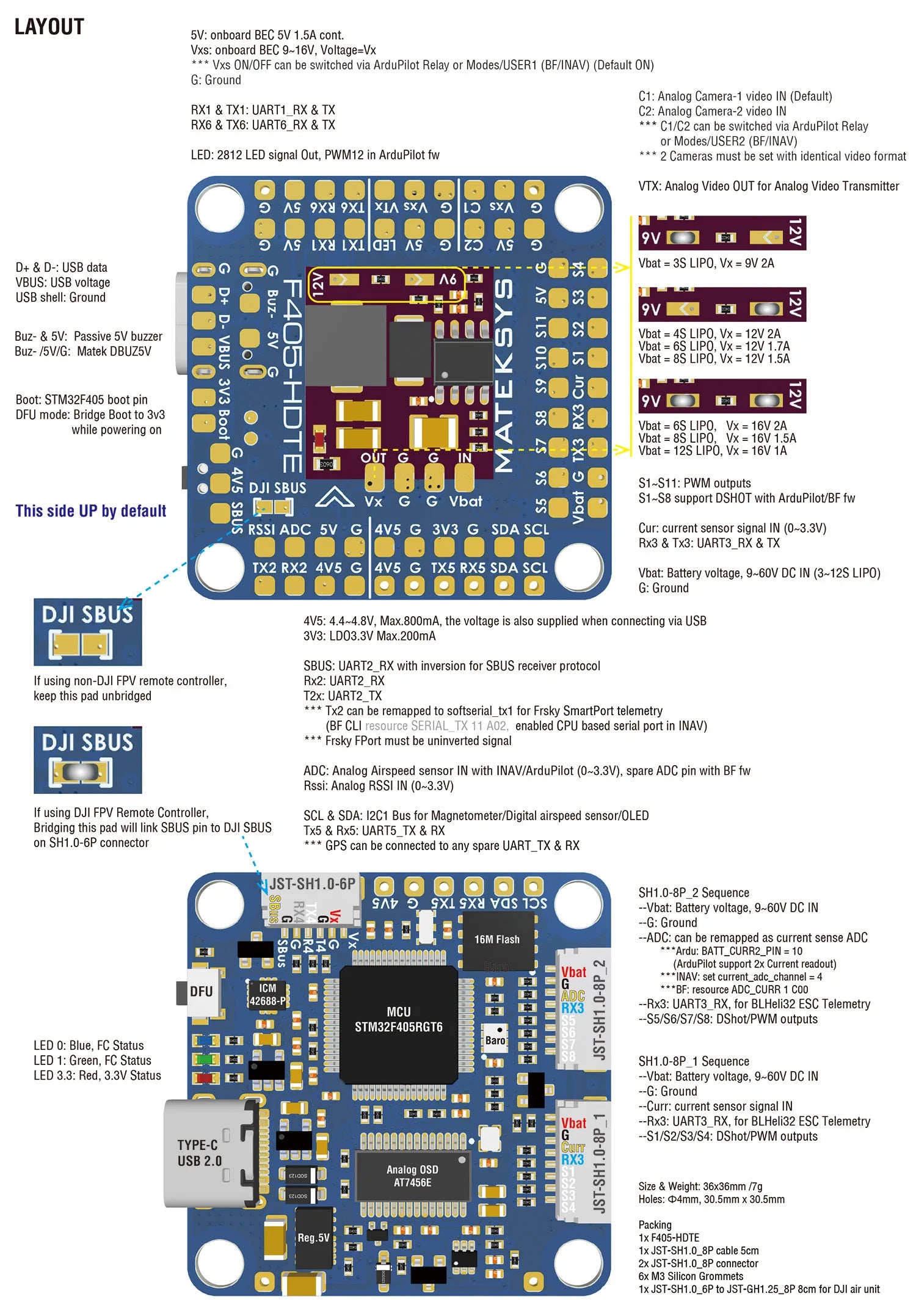
9-60V(3~12S LiPo) wide input voltage and voltage sense. and a 9~16V BEC for DJI OSD or analog VTX.
-
8motors+3servos in INAV/BF multirotor mixer.
-
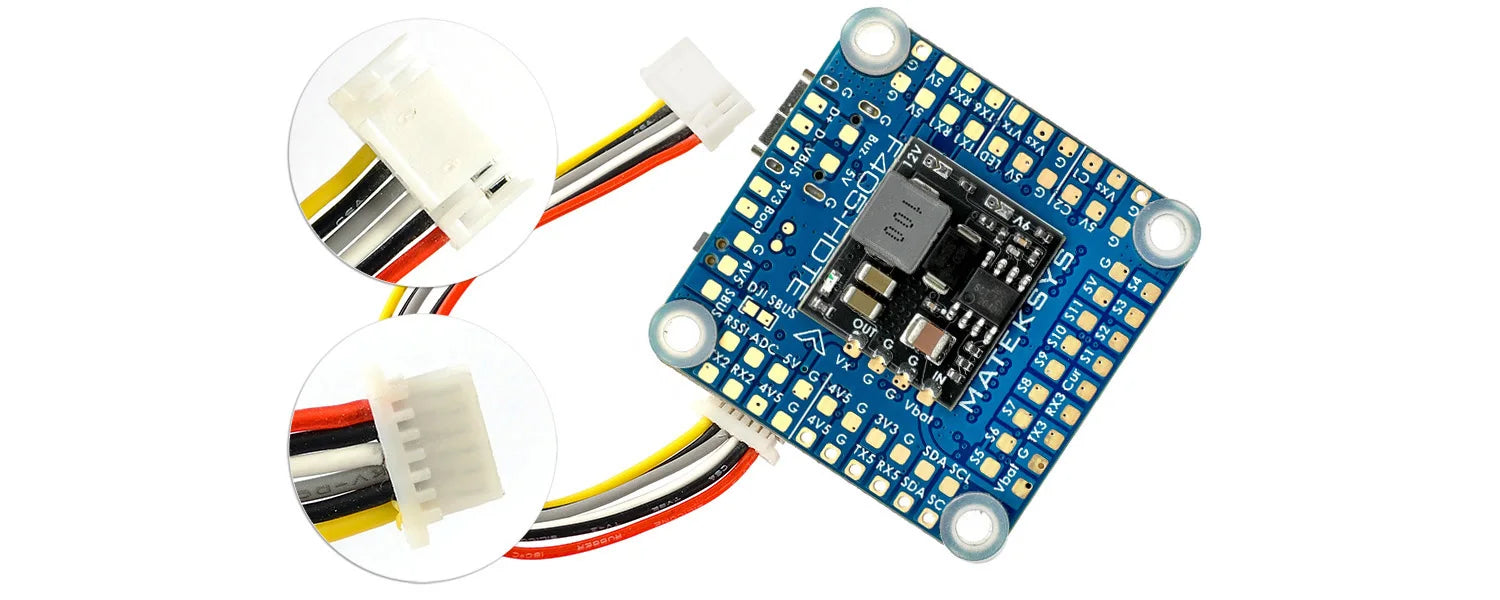
2x SH1.0_8pin connector for PnP with 2x 4in1 ESC
-
1x SH1.0_6pin connector for PnP with HD System(Caddx Vista & Air Unit)
-
USB pin breakout for connecting to external USB adapter.
Specifications
-
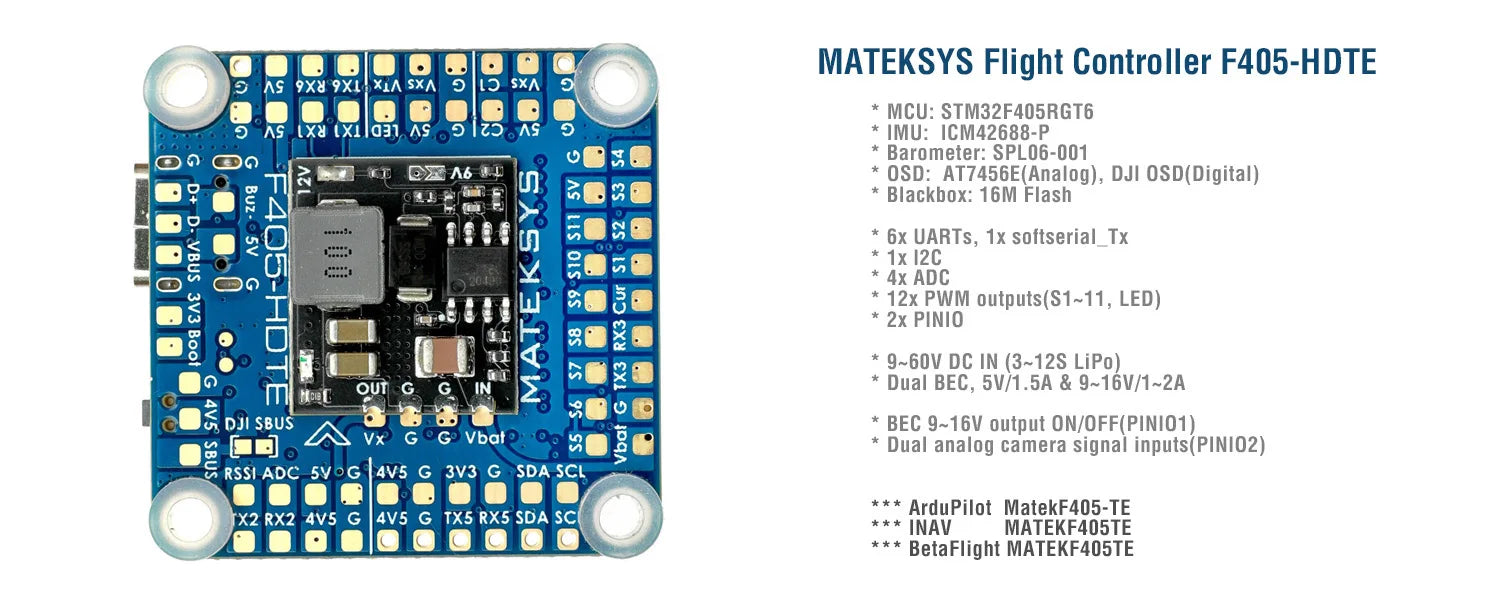
MCU: STM32F405RGT6
-
IMU: ICM42688-P
-
OSD: AT7456E, DJI OSD
-
Baro: SPL06-001 (I2C)
-
Blackbox: 16M-byte Flash memory
-
6x UARTs, 1x Softserial_Tx option
-
12x PWM outputs (8x Dshot)
-
1x I2C
-
4x ADC (VBAT, Current, RSSI, Airspeed)
-
2x PINIO
-
2x SH1.0_8pin connector for 4in1 ESC
-
1x SH1.0_6pin connector for HD System(Caddx Vista & Air Unit)
-
3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
-
9~16V(Vxs) output ON/OFF switchable
-
Dual analog camera signal switchable
Power
-
Input: 9~60V (3~12S LiPo)
-
BEC: 5V 1.5A
-
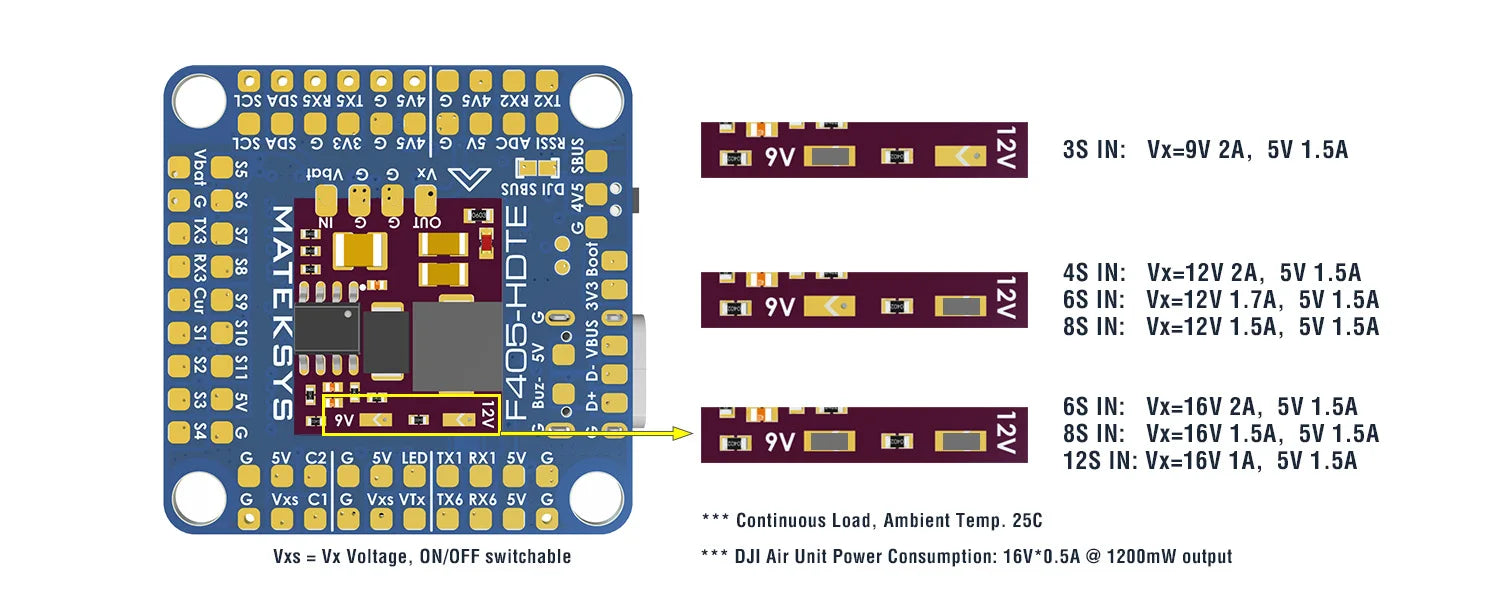
BEC: Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1.5A, 12S IN/16V 1A)
-
Battery Voltage Sensor: 1K:20K (INAV scale 2100, BF scale 210)
-
No Current Sensor built-in, supports external current sensor of PDB/4in1
Firmware
-
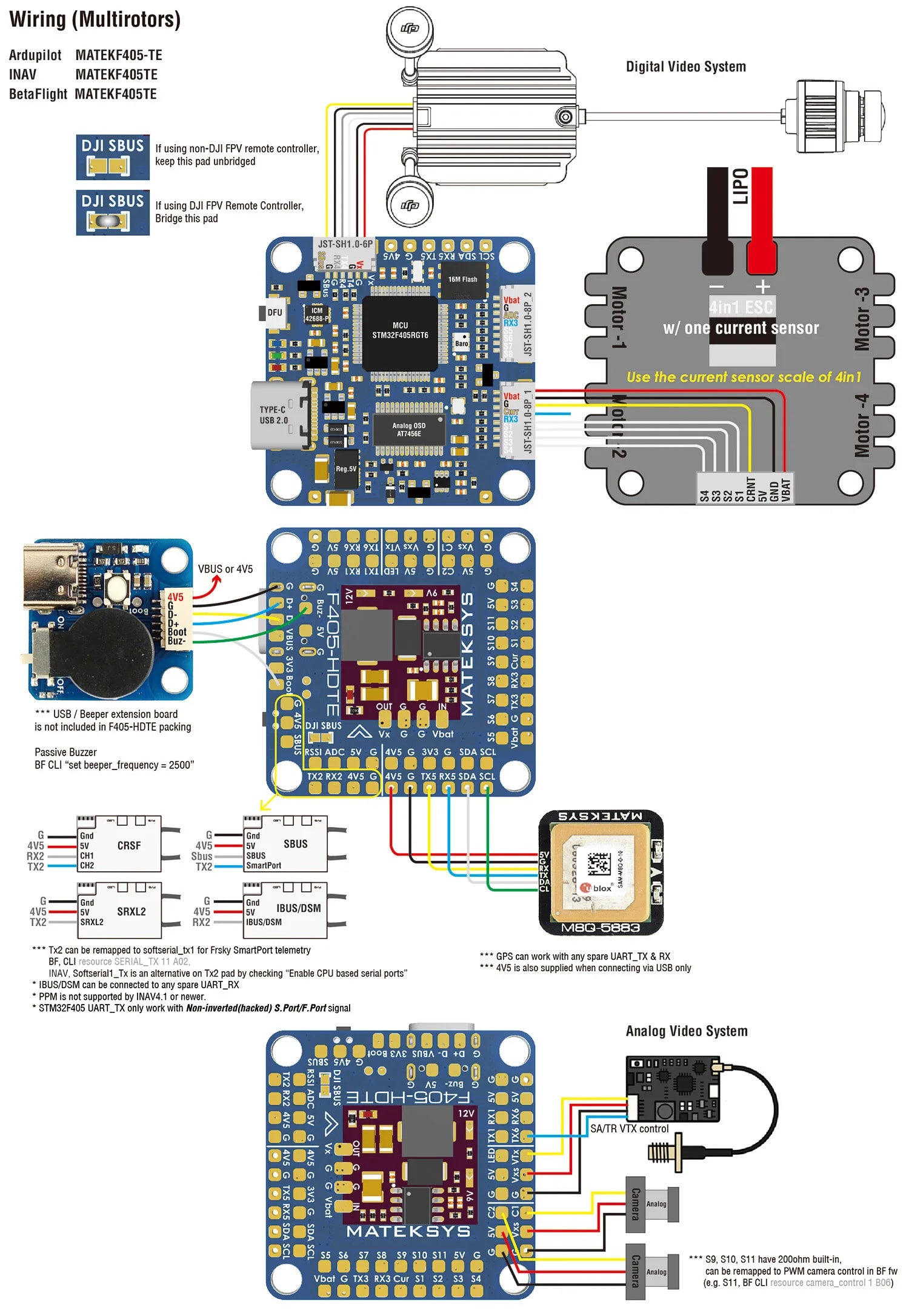
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE
-
BetaFlight: MATEKF405TE
Physical
-
Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
-
Dimensions: 36 x 36 x 9 mm
-
Weight: 7g
Including
-
1x FC F405-HDTE
-
6x Silicon grommets M4 to M3
-
1x SH1.0_8pin cable 5cm, 2x SH1.0_8pin connectors
-
1x SH1.0_6pin to GH1.25_8pin cable 8cm for HD System(Caddx Vista & Air Unit)
onboard BEC 5V, Voltage-Vx Vxs ON/OFF can be switched via ArduPilot Relay or Modes/USER1 (BFIINAV) DJI SBUS 4V5: 4.44.8V, Max. 80OmA, the voltage is also supplied when connecting via USB 313: LDO3.3V Max.2OOmA .
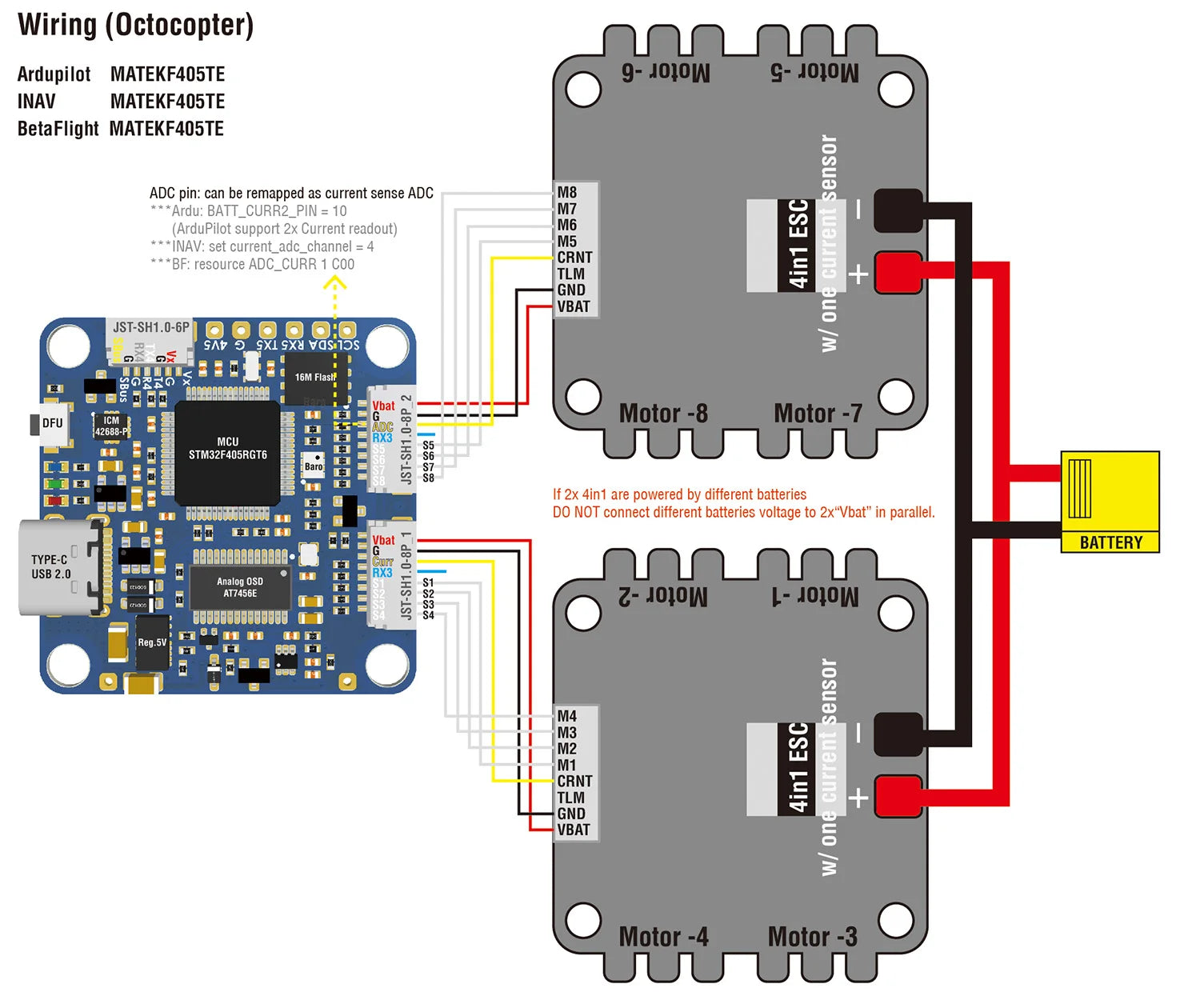
JOIOW INAV MATEKF4OSTE BetaFlight ADC pin: can be remapped as current sense ADC M8 1 Ardu: BATT_CURR2_PIN 10 M7 (ArduPilot support Zx Current readout)