

MUWEIDU L6020 Motor 24V 200rpm Servo Motor with 18-bit Encoder, RS485/CAN, 0.58N.m Rated Torque
MUWEIDU L6020 Motor 24V 200rpm Servo Motor with 18-bit Encoder, RS485/CAN, 0.58N.m Rated Torque
MUWEIDU
Couldn't load pickup availability
Overview
MUWEIDU L6020 Motor is a low-speed, high-precision brushless DC servo motor designed for speed/position control. It integrates an 18-bit single-turn absolute encoder and supports CAN or RS485 communication for robotics and automation systems that require stable, smooth operation. For product selection or technical support, contact [email protected] or visit https://rcdrone.top/.
Key Features
- Low-speed & high-precision brushless DC motor series
- Hollow-shaft design
- Stable & smooth operation
- Integrated high precision; lightweight construction; high torque performance
- Meets the requirements of low-speed and high-precision position control
- Motor core materials: premium silicon steel sheets and high-temperature resistant high-performance permanent magnets
- Outer rotor multi-stage flattened design for higher torque in space-constrained applications
- Brushless structure combined with high-performance bearings for smoother rotation and longer service life
- High-precision, low-temperature-drift alloy resistors for accurate current sampling and control
- Full N-channel three-phase full-bridge drive with low internal resistance and high current output
- Supports seamless switching between torque open-loop, speed, and position control modes
- Main control: 32-bit MCU with 72 MHz operating frequency
- Input voltage: 12~60 V (drive)
- One-time calibration, zero position never lost
- CE Certified (as stated)
Specifications
| Model | L6020 |
| Rated Voltage | 24V |
| Rated Current | 1.4A |
| Peak Power | 12.6W |
| Rated Torque | 0.58N.m |
| Peak Torque | 1.4N.m |
| Rated Speed | 200rpm |
| Encoder | 18bit |
| Rotor Inertia | 394gcm² |
| Motor Temperature Monitoring | YES |
| Control Modes | Speed/Position |
| Communication Protocol | RS485 or CAN |
| Overall Dimensions | Φ58mm×21mm |
| Weight | 185g |
Interface Definition
- ID SWITCH
- CAN/RS485
- B/L: RS485-B or CAN-L
- A/H: RS485-A or CAN-H
- V-: Negative Power Supply
- V+: Positive Power Supply
- T: UART Transmitter
- R: UART Receiver
- G: Signal GND
Application Scenarios
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
- 360° Camera
- Handheld Camera
- LiDAR
- Gimbal
PC Software / Control Modes (as stated)
PC-based parameter tuning / testing / firmware upgrade available. Compatible with open-source development platforms including PC, MCU, PLC, industrial computer and Raspberry Pi.
- Torque Mode
- Speed Mode
- Multi-Turn Control Mode
- Single-Turn Position + Direction Mode
- Incremental Position Mode
- Multi-Turn Control Mode (with speed limit)
- Single-Turn Position + Direction Mode (with speed limit)
- Incremental Position Mode (with speed limit)
Manuals / Files
Details

Designed for low-speed, high-precision motion control with a compact hollow-shaft form factor.

Core construction focuses on smooth rotation and accurate current control for stable positioning performance.
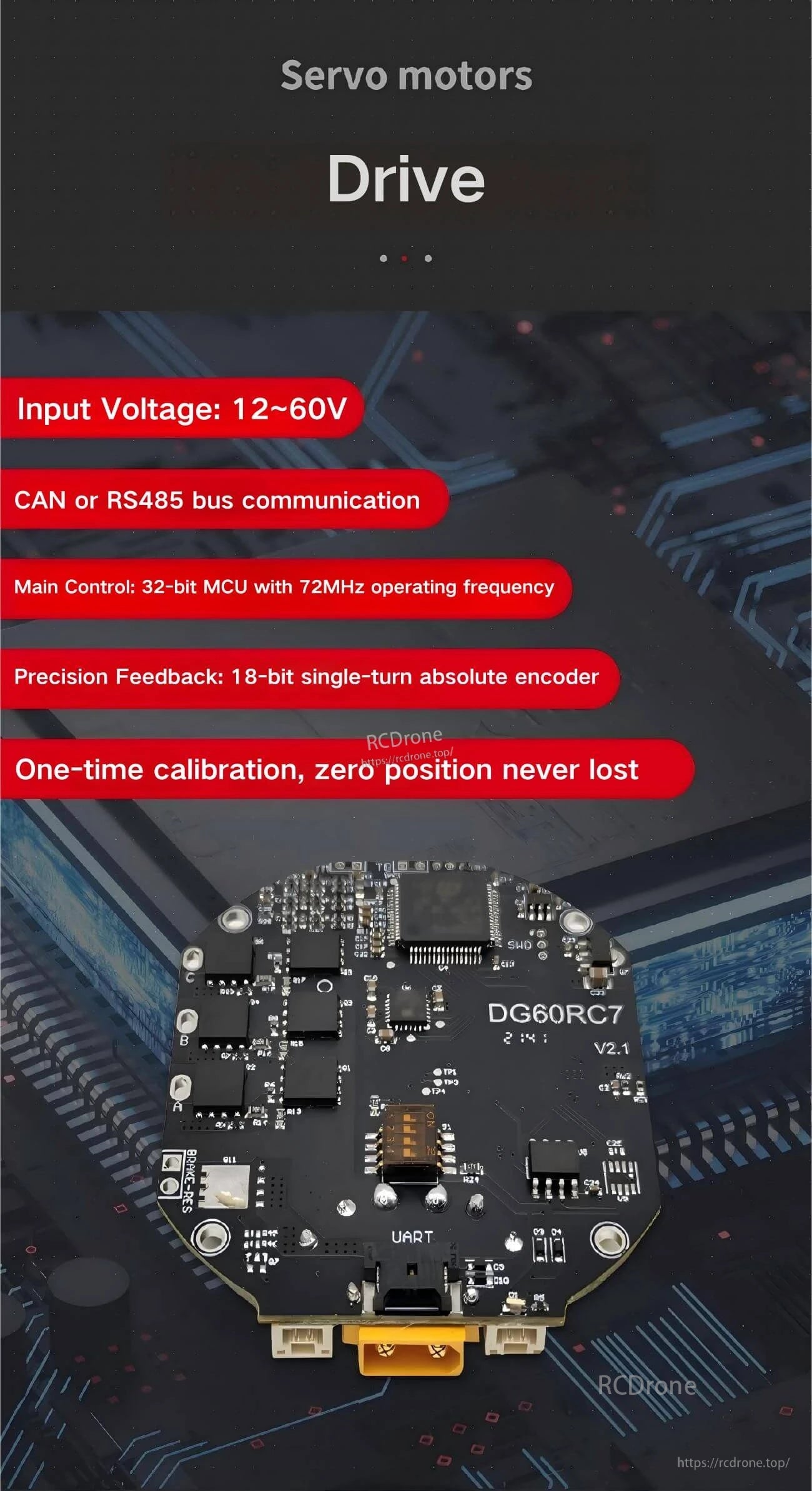
Built-in drive electronics support CAN or RS485 bus control with 18-bit absolute encoder feedback.

Clear interface labeling helps wire power, UART, and CAN/RS485 connections correctly.
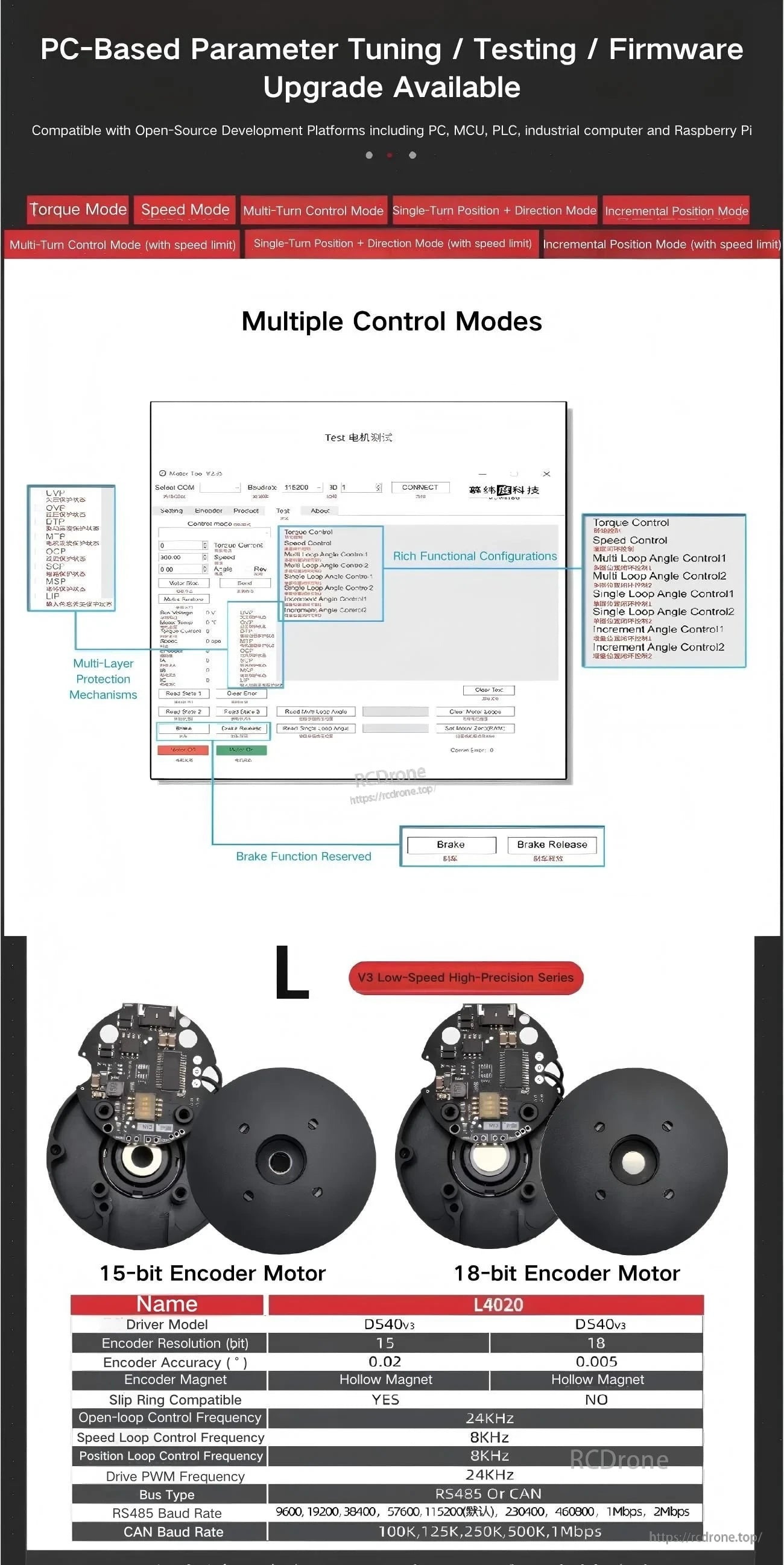
PC software enables parameter tuning, testing, and firmware upgrades across torque, speed, and position control modes.
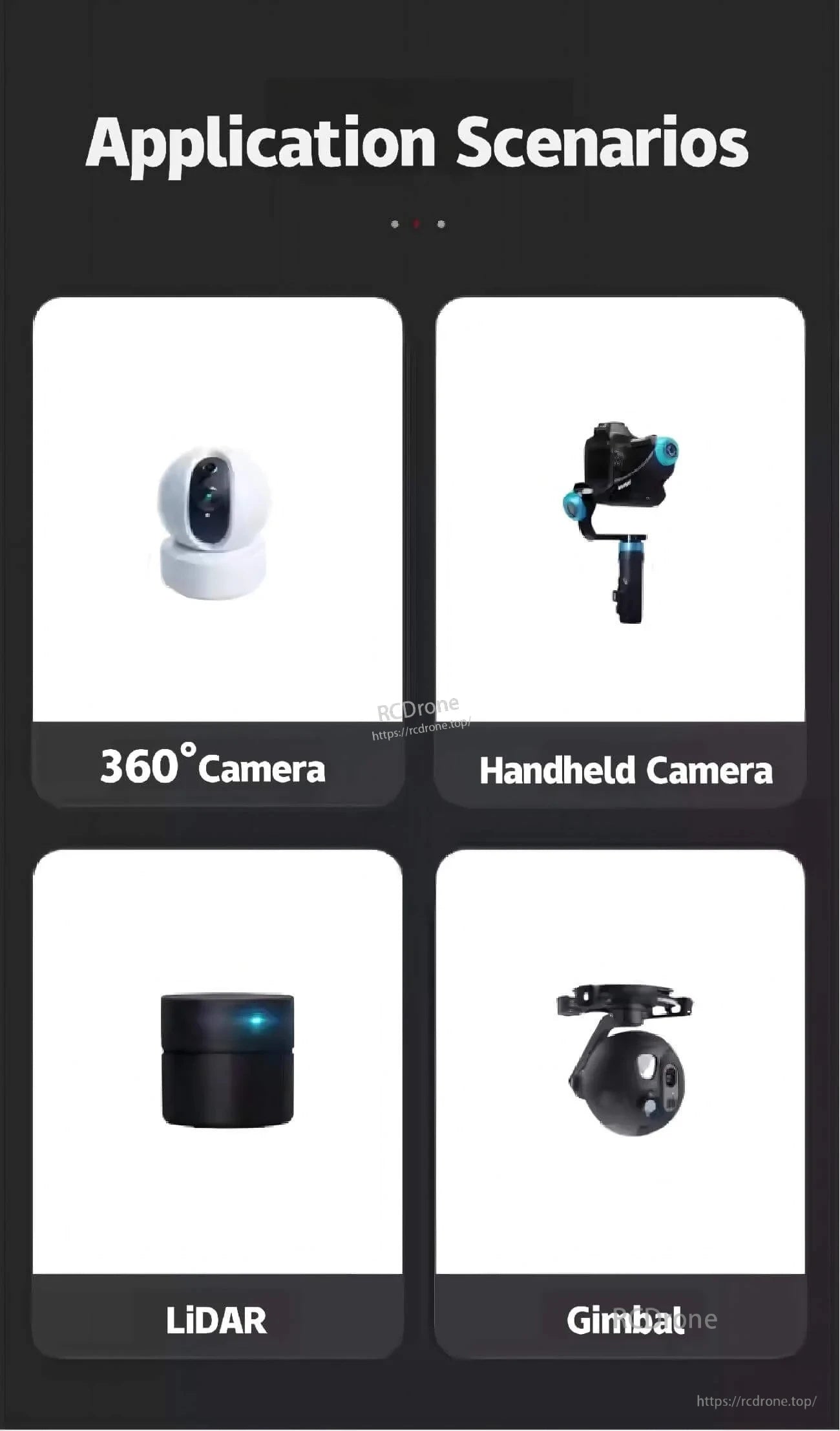
A practical fit for compact mechatronics builds such as gimbals, 360° cameras, and LiDAR modules.
Related Collections

