






MyActuator RH-32 Hollow Harmonic Robot Joint Module, 48V, 229Nm Peak Torque, Dual 17-Bit Encoders, CAN BUS & EtherCAT Control
MyActuator RH-32 Hollow Harmonic Robot Joint Module, 48V, 229Nm Peak Torque, Dual 17-Bit Encoders, CAN BUS & EtherCAT Control
MyActuator
Couldn't load pickup availability
Overview
The MyActuator RH-32 Hollow Harmonic Robot Joint Module is a high-torque, high-precision actuator designed for robotic arms, humanoid robots, and collaborative automation systems. Featuring a gear ratio of 100:1, 48V input voltage, and 229 N·m peak torque, the RH-32 ensures exceptional performance for applications requiring smooth motion, accurate control, and high load capacity. With support for dual encoders (17-bit input/output), CAN BUS & EtherCAT communication, and a hollow shaft design, it integrates seamlessly into advanced robotic systems.
Key Features
-
High Torque Performance – Delivers up to 150 N·m rated torque and 229 N·m peak torque, ideal for heavy-duty robotic joints.
-
Precision Control – Dual 17-bit encoders ensure precise feedback and repeatability of <0.01°.
-
Versatile Communication – Supports CAN BUS and EtherCAT for reliable and flexible system integration.
-
Robust Load Capacity – Handles up to 342.6 kN axial static load and 81.6 kN axial dynamic load.
-
Compact Hollow Design – Facilitates cable routing through the joint for a cleaner and safer robotic setup.
-
High Reliability – Rated F insulation grade and advanced heat dissipation design for industrial durability.
Technical Specifications
| Parameter | Unit | Value |
|---|---|---|
| Gear Ratio | — | 100 |
| Input Voltage | V | 48 |
| No Load Speed | RPM | 20 |
| No Load Current | A | 2.8 |
| Rated Speed | RPM | 18 |
| Rated Torque | N·m | 150 |
| Rated Power | W | 282 |
| Rated Current | A(rms) | 21.8 |
| Peak Torque | N·m | 229 |
| Peak Current | A(rms) | 32.1 |
| Motor Back-EMF Constant | Vdc/Krpm | 26.7 |
| Module Torque Constant | N·m/A | 6.9 |
| Motor Phase Resistance | Ω | 0.08 |
| Motor Phase Inductance | mH | 0.18 |
| Pole Pair | — | 10 |
| 3 Phase Connection | — | Y |
| Backlash | Arcsec | < 40 |
| Radial Load (Static/Dynamic) | kN | 65.4 / 38.2 |
| Axial Load (Static/Dynamic) | kN | 342.6 / 81.6 |
| Inertia (N/B) | kg·m² | 6.86 / 8.32 |
| Encoder Type | — | Dual Encoder ABS-17BIT (Input/Output) |
| Repeat Position Accuracy | Degree | < 0.01 |
| Communication | — | CAN BUS & EtherCAT |
| Weight (N/B) | Kg | 4.32 / 4.74 |
| Insulation Grade | — | F |
Interface Description
The RH-32 supports EtherCAT and CAN communication, providing reliable real-time control.
-
EtherCAT: High-speed deterministic communication for industrial automation.
-
CAN BUS: Flexible and stable communication for complex multi-joint systems.
-
Dedicated connectors for power, feedback, and control signals ensure secure and efficient integration.
Packaging Information
-
Box Dimensions: 165mm × 165mm × 127mm
-
Included Accessories:
-
Power Supply Cable × 2
-
CAN BUS Communication Cable × 2
-
Bleeder Resistor Cable × 1
-
Multi-turn Battery Cable × 1
-
120Ω Terminal Resistance × 1
-
EtherCAT Communication Cable × 2
-
CAN BUS Communication Module × 1 (with free USB-CAN adapter)
- MyActuator RH-32-100 Robot Joint Module x 1
-
Applications
-
Collaborative robots (cobots)
-
Humanoid and service robots
-
Industrial manipulators
-
Automated guided vehicles (AGVs)
-
Precision positioning systems
Details
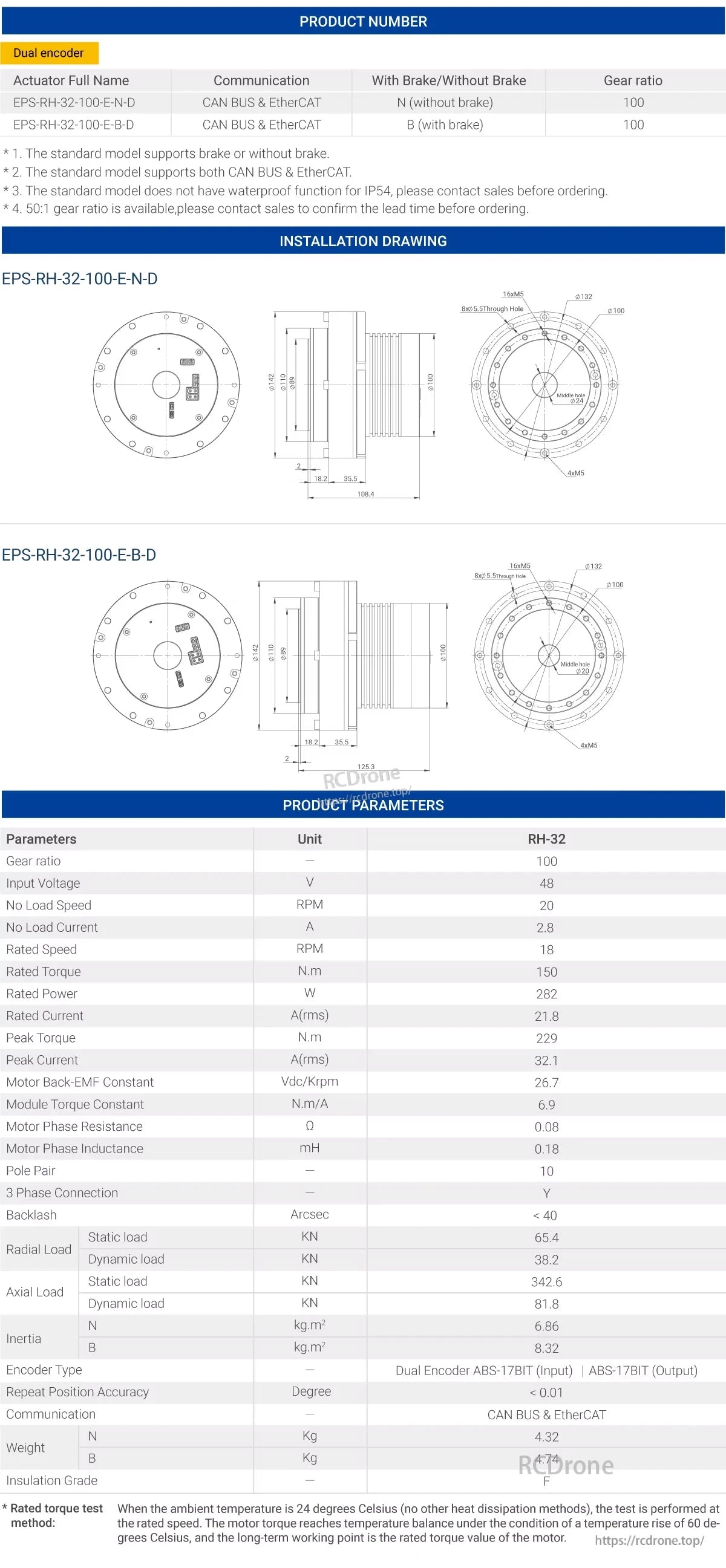
Robot joint RH-32 offers dual encoder, CAN BUS/EtherCAT, 100:1 gear ratio, 48V, 150 N.m torque, 21.8 A current. Optional brake, IP54 available.
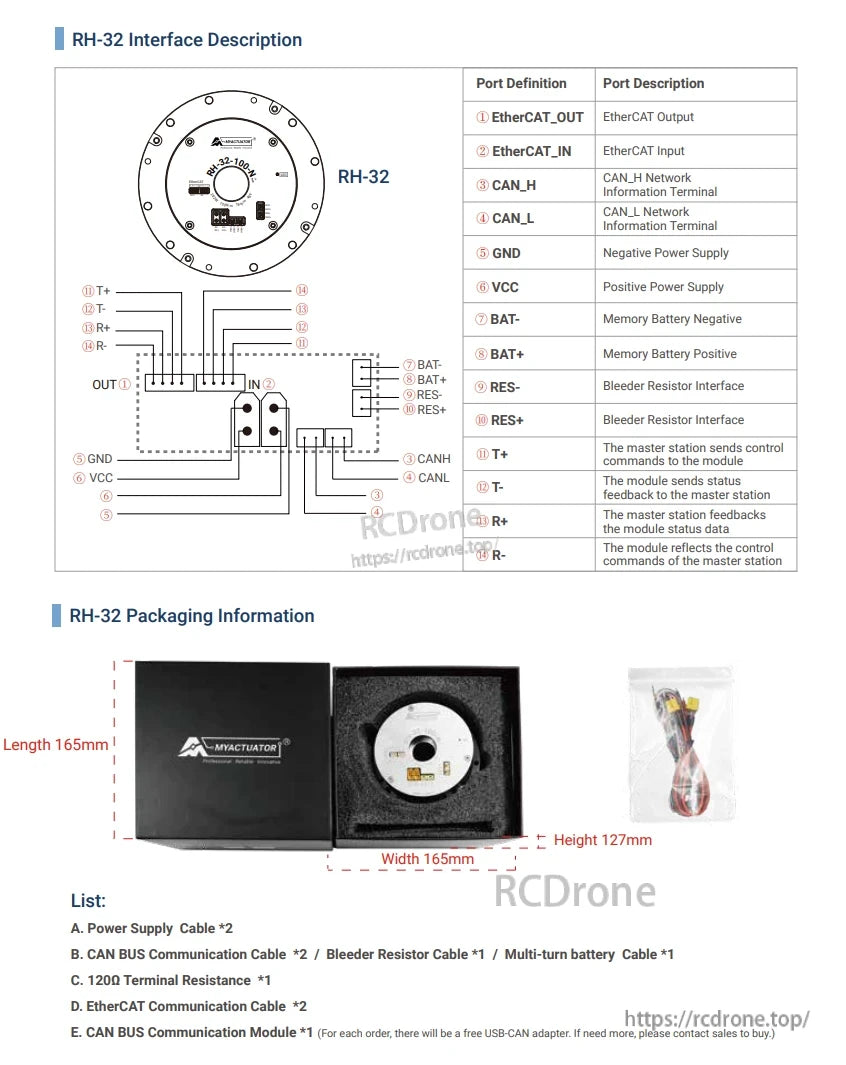
Robot joint RH-32 features EtherCAT and CAN interfaces, port definitions, dimensions 165x165x127mm. Includes cables, terminal resistance, CAN module.
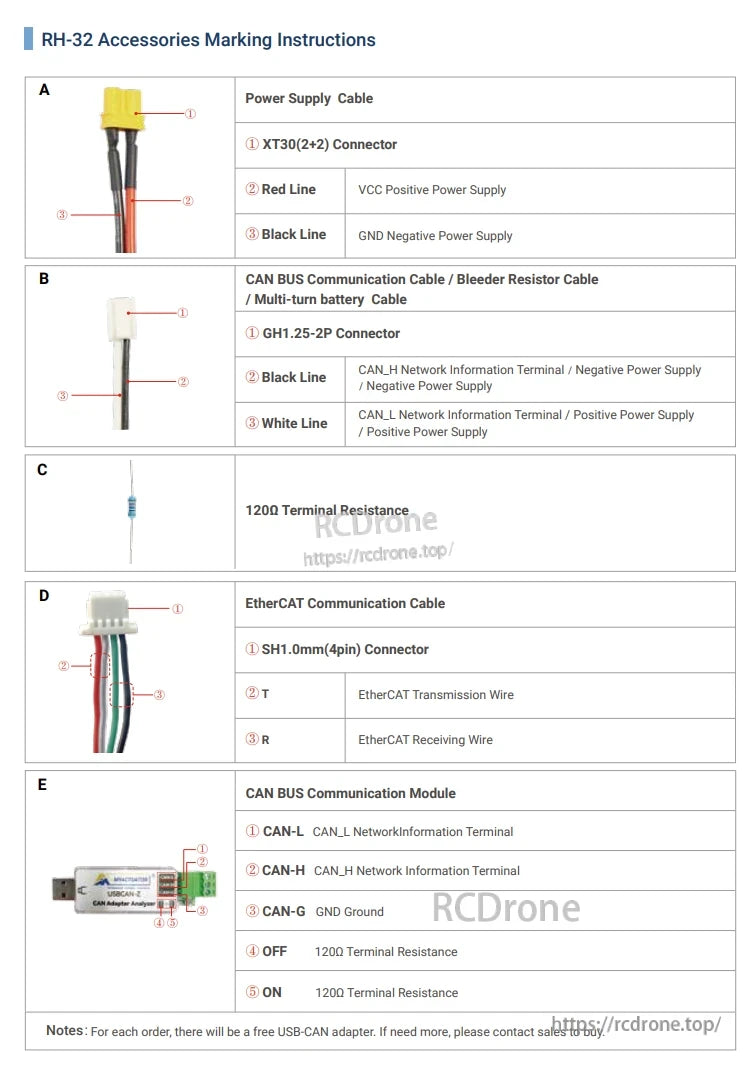
RH-32 accessories include power, CAN BUS, EtherCAT cables, 120Ω resistor, and CAN module. Details cover connectors, wire functions, and terminal resistances for proper installation and communication. Free USB-CAN adapter included with each order.
Related Collections






