






MyActuator RMD-X4-10 Planetary Actuator 10N·m Dual Encoder EtherCAT+CAN Robot Joint Drive
MyActuator RMD-X4-10 Planetary Actuator 10N·m Dual Encoder EtherCAT+CAN Robot Joint Drive
MyActuator
Couldn't load pickup availability
Overview
The MyActuator RMD-X4-10 planetary actuator is a high-performance DC motor joint module designed for advanced robotic applications. Featuring a 12.6:1 planetary gear ratio, 10N·m peak torque, and 100W rated output power, it integrates a dual encoder system (17-bit input / 18-bit output) that delivers 0.01° precision control. Its large hollow structure supports multi-sensor integration, enabling a central hub for full-body posture control in humanoid robots. With EtherCAT and CAN dual-protocol communication, the actuator achieves 250μs ultra-fast response, making it ideal for high-dynamic, high-reliability scenarios such as humanoid robots, bionic leg drives, and industrial automation.
Key Features
-
High Precision Dual Encoder: 17-bit input / 18-bit output with 0.01° accuracy
-
Peak Torque 10N·m with 12.6:1 planetary gear ratio
-
Crossed Roller Bearing: Exceptional anti-bending moment capability for stable robotic joints
-
EtherCAT + CAN Bus Dual Communication: Supports multi-machine linkage, ultra-fast 250μs response
-
Large Hollow Structure: Enables integration of sensors, cables, and slip-rings for complex robotic systems
-
High Reliability: Designed for humanoid gait control, smooth transitions for running, jumping, and complex motions
-
Compact & Lightweight: Φ55mm × 55.5mm, weight 0.33kg
Specifications
| Parameter | Value |
|---|---|
| Model | RMD-X4-10 |
| Gear Ratio | 12.6:1 |
| Input Voltage | 24V DC |
| Rated Speed | 238 RPM |
| No-load Speed | 317 RPM |
| Rated Output Power | 100W |
| Rated Torque | 4N·m |
| Peak Torque | 10N·m |
| Rated Current | 7.84A |
| No-load Current | 1A |
| Encoder Type | Dual Encoder (ABS-17bit / 18bit) |
| Communication | EtherCAT + CAN Bus |
| Weight | 0.33kg |
| Size | Ø55mm × 55.5mm |
Applications
-
Humanoid Robots – Joint drives for arms, legs, and torso
-
Bionic Leg Drives – High-torque with anti-bending design for running and jumping gaits
-
Collaborative Robots – Smooth motion control for industrial automation
-
Exoskeletons – Lightweight, high-dynamic actuators for human-assistive devices
-
Flexible Production Lines – Multi-axis synchronization through EtherCAT high-speed communication
Packaging & Accessories
-
Power Supply + CAN Bus Communication Cable ×1
-
120Ω Terminal Resistance ×1
-
EtherCAT Communication Cable ×2
-
CAN Bus Communication Module ×1 (USB-CAN adapter included per order)
Packaging Dimensions: 100mm × 100mm × 70mm
Details

RMD-X4-PT2.5-10-C dual encoder robot joint drive with 24V input, 12.6 gear ratio, 4N·m torque, and 100W output. Features CAN BUS/EtherCAT interface, 317RPM no-load speed, and 0.28kg weight. Includes installation dimensions and technical specs.

Planetary actuator with 10N.m peak torque, 12.6:1 gear ratio, 0.33kg weight. Size: Ø55mm×55.5mm. Features EtherCAT/CANBUS communication, dual encoder, high-speed MCU, CAN chips, and deep groove ball bearings.

Dual Encoder ABS-17BIT Input / 18BIT Output, X4-10, SN:40225621, MYACTUATOR

MYACTUATOR's RMD-X4-10 Planetary Actuator offers 100W power, 46Nm torque, dual encoder, 238rpm speed. Comes with power + CAN BUS cable, 120Ω resistor, EtherCAT cable, CAN BUS module, and free USB-CAN adapter.
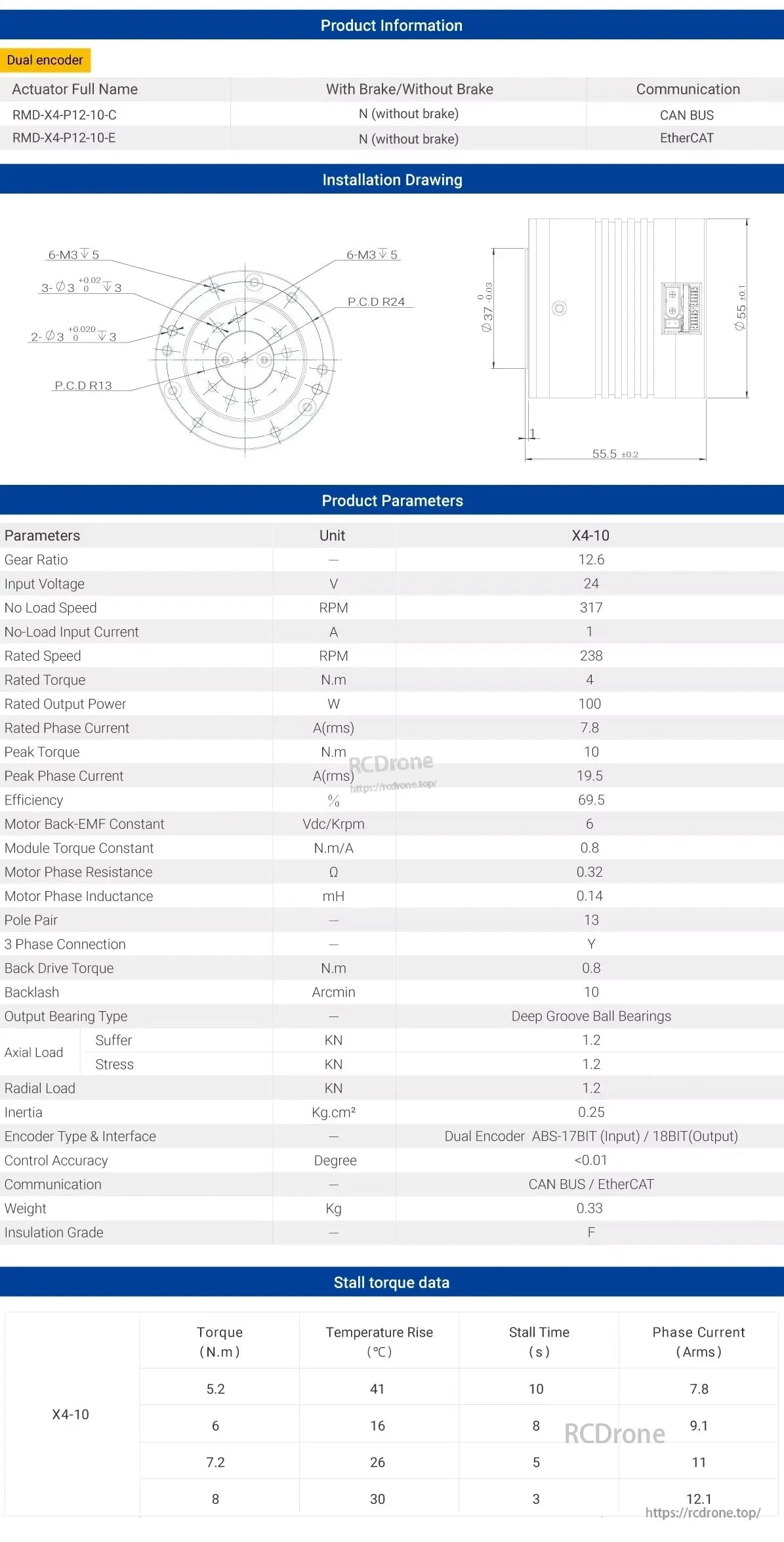
The RMD-X4-10 Robotic Planetary Actuator has a dual encoder, 12.6 gear ratio, 24V input, 100W output, and CAN BUS/EtherCAT. It delivers 4N.m torque, 238 RPM speed, weighs 0.33kg, and uses deep groove ball bearings for high efficiency.

X4-10 interface includes power, CAN, and EtherCAT ports. Packaging contains power supply, cables, resistors, and module. Dimensions: 100x100x70mm. Includes USB-CAN adapter with each order.

X4-10 accessories include power supply, CAN BUS and EtherCAT cables, terminal resistance, and a CAN BUS module. Details cover connectors, wire functions, signal lines, and USB-CAN adapter notes.
Related Collections






