





MyActuator RMD-X4-36 34N·m Planetary Actuator DC Brushless Motor with Dual Encoder, EtherCAT & CAN Bus, 36:1 Gear Ratio
MyActuator RMD-X4-36 34N·m Planetary Actuator DC Brushless Motor with Dual Encoder, EtherCAT & CAN Bus, 36:1 Gear Ratio
MyActuator
Couldn't load pickup availability
Overview
The MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor is a high-performance joint actuator designed for robotics and automation systems requiring precise motion control, high torque output, and compact integration. With a 34N·m peak torque, 36:1 gear ratio, and crossed roller bearing structure, it delivers excellent anti-bending capability and durability. Featuring EtherCAT + CAN dual communication protocols and a 250μs ultra-fast response, this actuator is ideal for humanoid robots, robotic arms, mobile platforms, and other advanced robotic applications. Its dual encoder design (ABS 17-bit input / 18-bit output) ensures ultra-high positioning accuracy, while the compact size (55mm × 61mm, 0.36kg) enables lightweight and efficient integration.
Key Features
-
High Precision Dual Encoder: 17-bit (input) + 18-bit (output) for 0.01° accuracy.
-
EtherCAT + CAN Bus Protocols: Flexible communication with 250μs ultra-fast response.
-
Crossed Roller Bearings: Superior anti-bending performance and long service life.
-
High Power Density: Compact 55mm diameter, 61mm length, and only 0.36kg weight.
-
Peak Torque 34N·m and Rated Torque 11.5N·m ensure stable, powerful motion output.
-
High Efficiency: 100W rated power with smooth FOC (Field-Oriented Control) technology.
-
Versatile Application: Designed for humanoid robots, exoskeletons, manipulators, and automation systems.
Specifications
| Parameter | Value |
|---|---|
| Model | RMD-X4-P36-36-C |
| Input Voltage | 24V |
| Gear Ratio | 36:1 |
| No-Load Speed | 111 RPM |
| No-Load Current | 0.9 A |
| Rated Speed | 83 RPM |
| Rated Torque | 11.5 N·m |
| Rated Output Power | 100 W |
| Peak Torque | 34 N·m |
| Peak Phase Current | 21.5 A (rms) |
| Pole Pairs | 13 |
| Encoder Type | Dual Encoder ABS 17-bit (Input) / 18-bit (Output) |
| Communication Protocols | EtherCAT / CAN Bus |
| Size | Ø55mm × 61mm |
| Weight | 0.36 kg |
Package Contents
-
1 × RMD-X4-36 Planetary Actuator Motor
-
1 × Power Supply + CAN Bus Communication Cable
-
1 × 120Ω Terminal Resistance
-
2 × EtherCAT Communication Cables
-
1 × CAN Bus Communication Module (USB-CAN adapter)
Applications
-
Humanoid and bionic robots
-
Collaborative robotic arms
-
Exoskeletons and rehabilitation robots
-
Service robots and mobile platforms
-
Precision automation systems requiring compact, high-torque actuators
Details

Planetary actuator with 34N.m peak torque, 36:1 gear ratio, 0.36kg weight, Ø55mm×61mm size. Features EtherCAT/CANBUS communication, dual encoder, high-speed MCU, CAN chips, and crossed roller bearings.

RMD-X4-P36-36C motor: 24V, 10.5N.m torque, 83RPM, dual encoder, EtherCAT+CAN BUS, 36 gear ratio, 0.36kg, ABS-17BIT/18BIT encoder, detailed dimensions included.

X4-36 motor, 100W, 12N.m, dual encoder, 17BIT input, 18BIT output, 63rpm, 1:36 gear ratio, CAN bus interface, LED indicator.

MYACTUATOR X4-36 motor, 100W, 12N.m, dual encoder, 83rpm, 1:36 ratio. Includes power supply, CAN BUS cable, 120Ω resistor, EtherCAT cables, and CAN BUS module with free USB-CAN adapter.
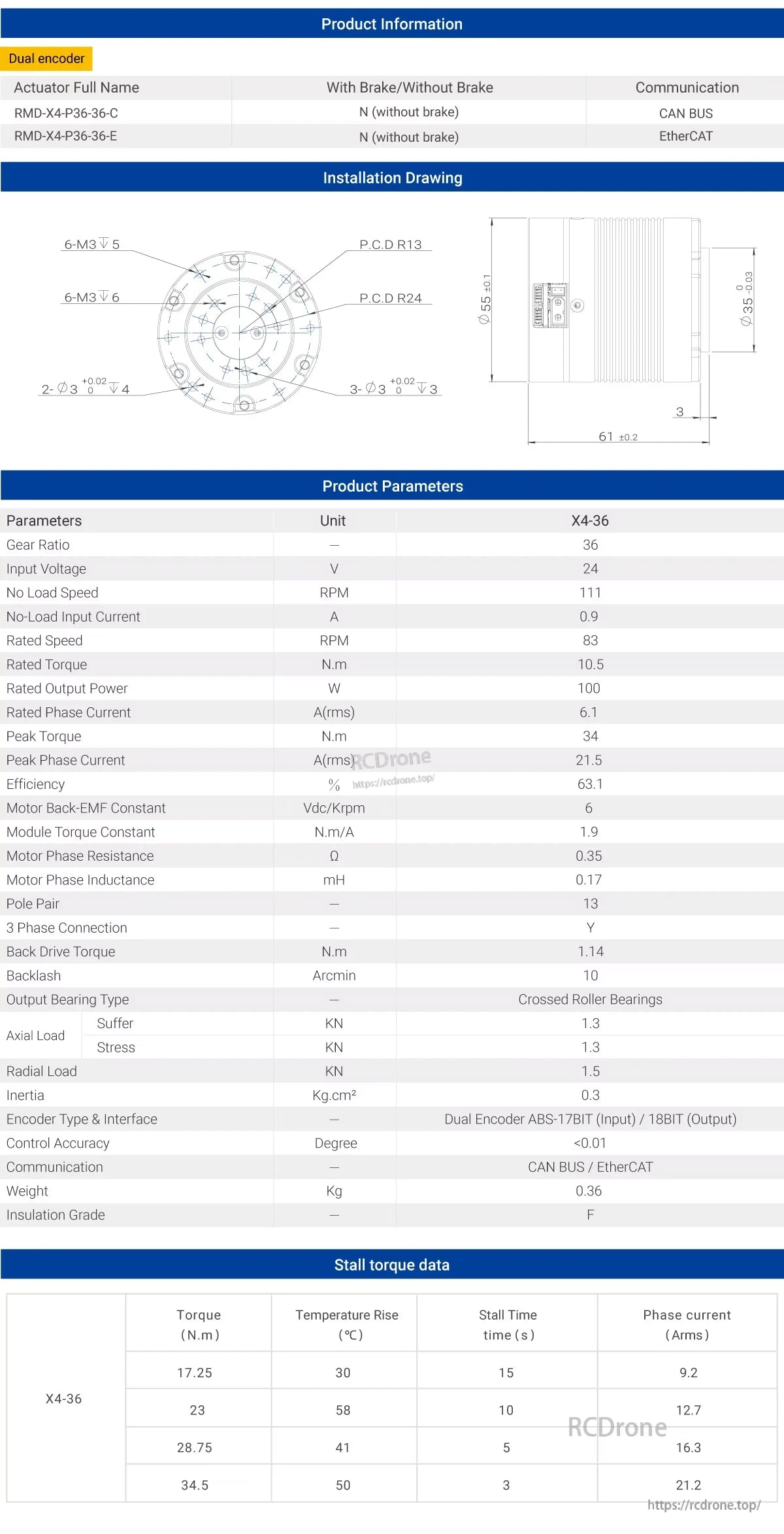
RMD-X4-P36-36 motor has dual encoder, 36 gear ratio, 24V input, 100W output, CAN BUS/EtherCAT. Rated torque: 10.5 N.m, speed: 83 RPM, weight: 0.36 kg. Stall torque data includes torque, temperature rise, time, and phase current values.

Interface details include power, CAN, and EtherCAT ports. Packaging has motor, cables, resistors, communication modules. Dimensions: 100x100x70mm. Includes USB-CAN adapter.
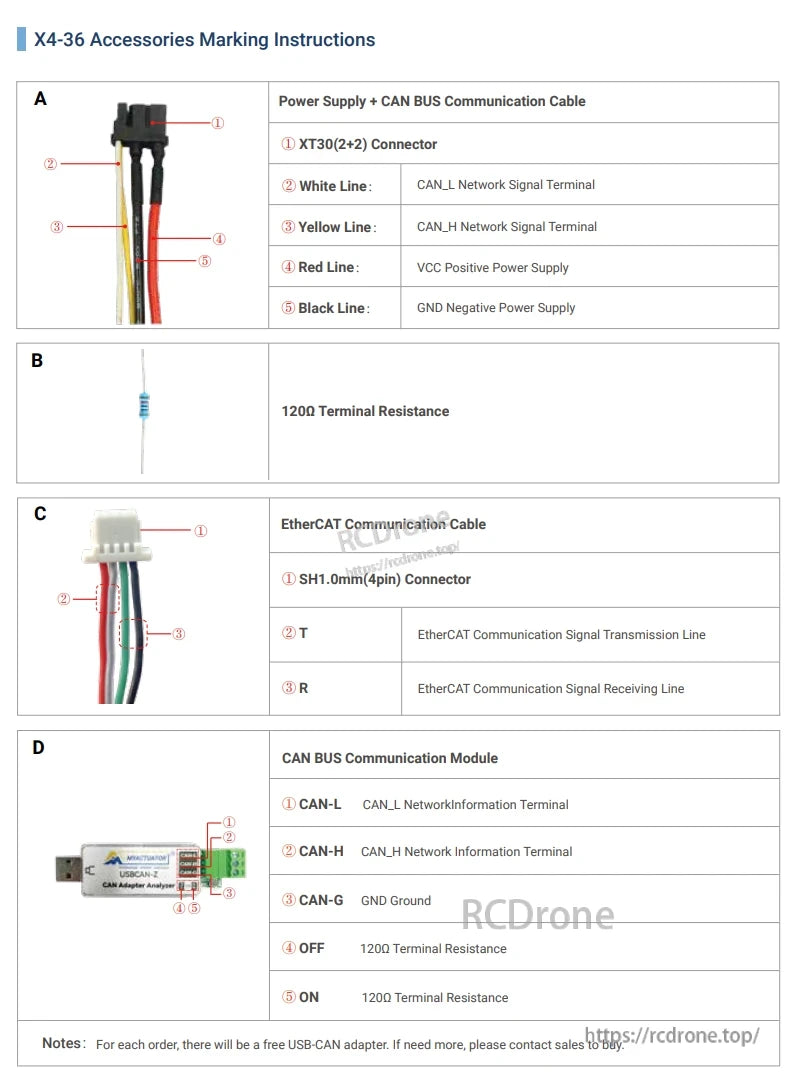
X4-36 accessories include power supply, CAN BUS, EtherCAT cables, 120Ω resistance, and CAN module. Details cover connectors, wire colors, signal lines, and terminal settings for communication and power connections. USB-CAN adapter included with each order.
Related Collections





