





OYMotion ROH-AP001 Dexterous Robot Hand, 6 DOF, 11 joints, force sensors, UART/RS485/CAN, PID control, 0.7 s
OYMotion ROH-AP001 Dexterous Robot Hand, 6 DOF, 11 joints, force sensors, UART/RS485/CAN, PID control, 0.7 s
OYMotion
Couldn't load pickup availability
Overview
OYMotion ROH-AP001 Dexterous Hand is a Robot Hand with 11 movable joints and 6 built-in motor drivers providing 6 active degrees of freedom. A built-in PID motor control algorithm enables accurate, repeatable grasping and manipulation of objects. Each finger integrates a force sensor for real-time monitoring and closed-loop control of gripping force. Physical interfaces include UART, RS485 or CAN FD, with support for SerialCtrl dedicated serial protocol, ModBus-RTU, and CAN protocol. ROS/ROS2 platforms are supported for secondary development via SDK (license agreement required).
Key Features
- 6 active DOF and 11 articulations; independently motorized fingers for natural grip.
- Built-in motor drivers and PID control; all actuation integrated in the hand.
- Force sensors on each finger with tactile feedback and real-time force control.
- Powered thumb rotation plus foldaway finger design.
- Touch-screen operation supported at fingertips.
- Fast motion: 0.7 s full-range bend/stretch and 0.7 s thumb full-range rotation.
- Load capacity: up to 30 Kg passive load for four fingers (bent), 10 Kg per finger (bent), 8 Kg per finger (stretched).
- Human-like size and proportions; soft finger pads and silicone glove; customized wrist design; message beeper.
- Interfaces and protocols: UART/RS485/CAN with SerialCtrl and ModBus-RTU; CAN at 1M baud.
- Materials evidenced: aluminum alloy, zinc alloy, stainless steel, silicone, plastic.
Specifications
| Active DOF | 6 |
| Movable joints (articulations) | 11 |
| Vertical distance from the tip of the middle finger to the wrist | 183 mm |
| Vertical distance from thumb tip to wrist | 95 mm |
| Thumb length | 111 mm |
| Maximum palm width | 82 mm |
| Wrist diameter | 49 mm |
| Maximum opening and closing angle of the thumb side | 0~31 ° |
| Maximum opening and closing angle of thumb to palm | 0~50 ° |
| Thumb lateral rotation angle | 0~90 ° |
| Bending/stretching time for full range at maximum speed | 0.7 second |
| Rotation time of thumb for full range at maximum speed | 0.7 second |
| Active force of each finger tip on stretched state | ≥0.5 Kgf |
| Active force of each finger tip on bended state | ≥1.0 Kgf |
| Maximum active force of thumb tip | ≥1.0 Kgf |
| Maximum passive load for four fingers on bended state | 30 Kg |
| Maximum passive load for each fingers on bended state | 10 Kg |
| Maximum passive load for each finger on stretched state | 8 Kg |
| Finger touch screen function | Supported |
| Finger force feedback | Supported |
| Working environment temperature | -10 °C ~ +40 °C |
| Working environment humidity | Maximum relative humidity 85% |
| Design service life-span | 3 years |
| Weight (including wrist) | 640 g ± 5 g |
| Communication Interface | UART/RS485/CAN |
| Baud Rate | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Supported Protocol | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materials | Aluminum alloy; zinc alloy; stainless steel; silicone; plastic |
Applications
- Robotic end-effectors and humanoid robots.
- Educational and research equipment.
- Bionic prosthetics.
- Industrial automation and AGV systems.
For ordering assistance, integration guidance, or technical support, please contact [email protected] or visit https://rcdrone.top/.
Manuals
Details

The ROHand delivers ±1mm positioning accuracy through built-in PID motor control and offers six active degrees of freedom to simulate human hand motions like pinching and grasping. Ideal for humanoid robots, robotic end-effectors, inspection systems, intelligent bionic prosthetics, and educational or research applications, its design supports versatile, precise manipulation in complex tasks.
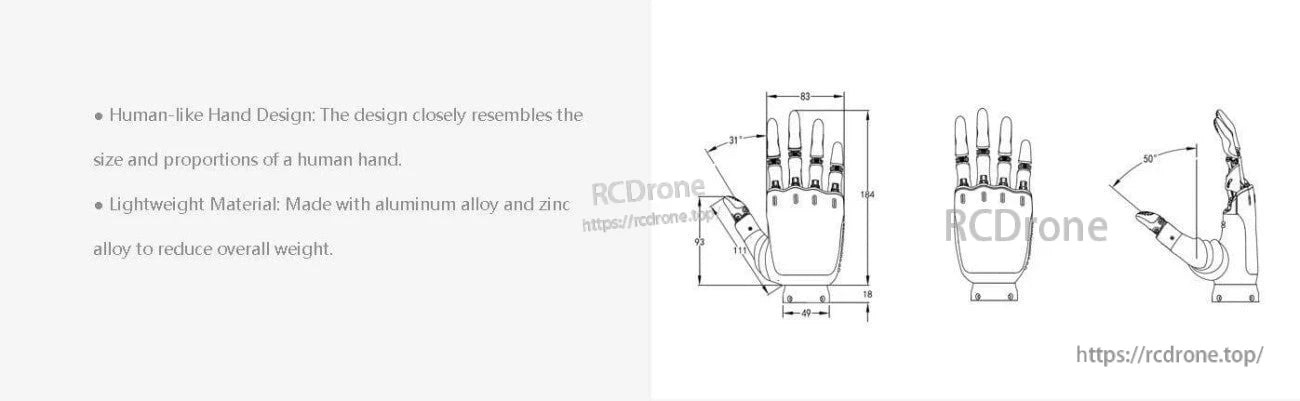
Human-like dexterous robot hand with lightweight aluminum zinc alloy construction and precise dimensions.

OYMotion ROH-AP001 dexterous robot hand mimics human proportions, featuring articulated fingers and sensors for precise, life-size robotic manipulation.
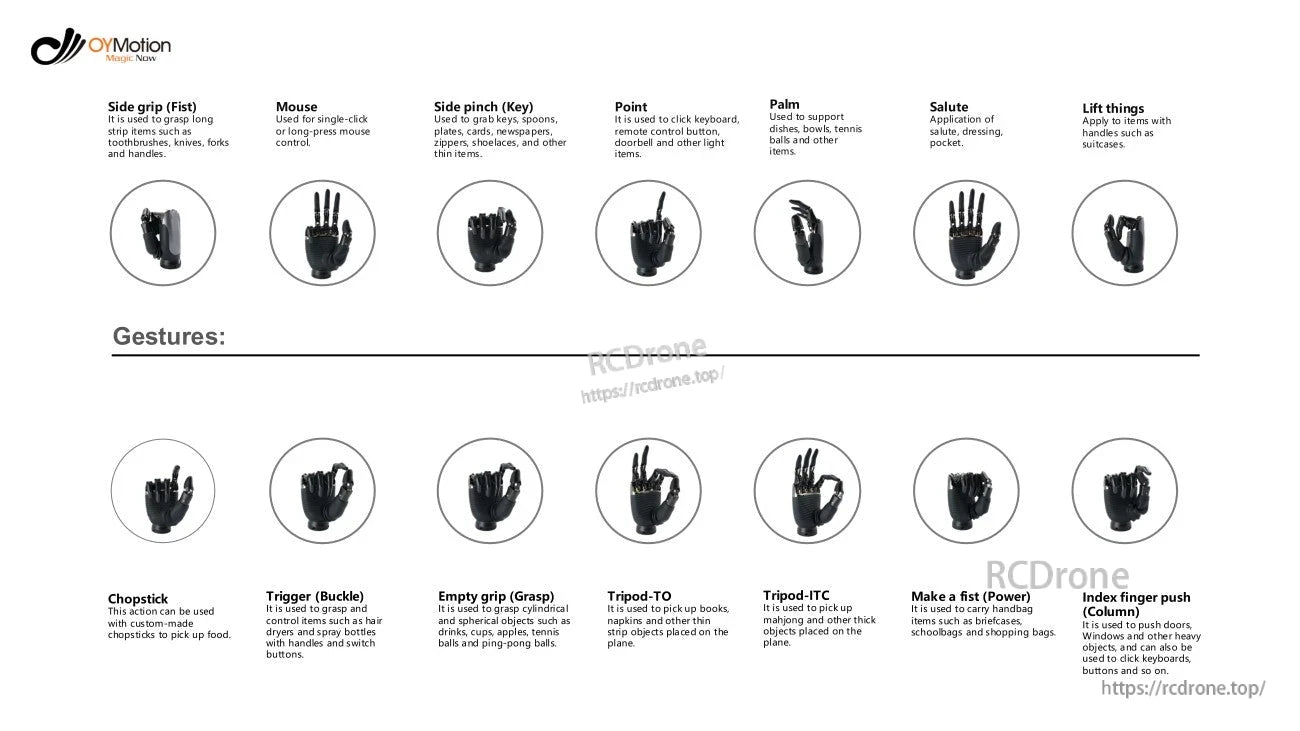
OYMotion robot hand performs 14 precise gestures—like gripping, pointing, and lifting—to handle daily tasks such as using chopsticks, carrying bags, or clicking keyboards, showcasing advanced dexterity and practical utility.

OYMotion robot hand offers motorized fingers, foldaway design, soft pads, powered thumb, silicon glove, built-in actuation, beeper, custom wrist, and RS485 connector for dexterous natural grip.
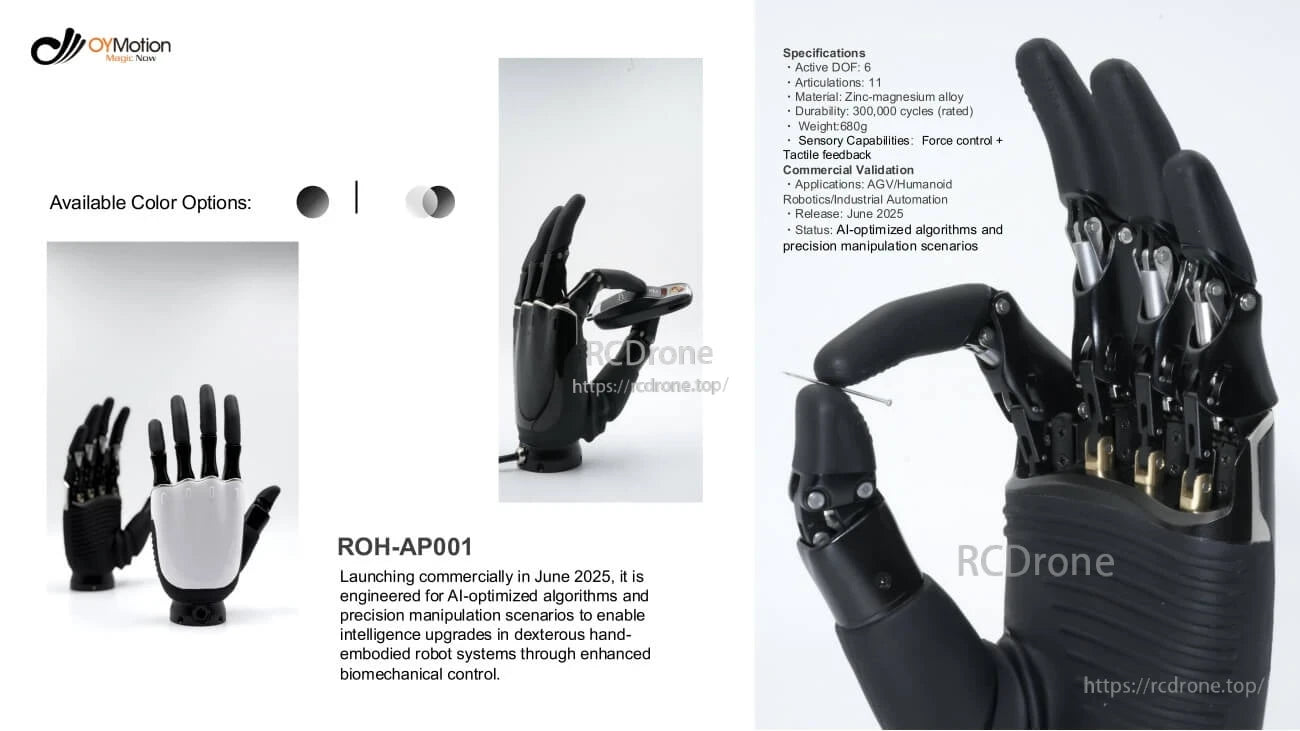
The OYMotion ROH-AP001 dexterous robot hand has 6 active DOF, 11 articulations, a zinc-magnesium alloy build, 300k-cycle durability, weighs 680g, and offers force/tactile feedback for AI and precision tasks—launching June 2025.

The OYMotion ROH-AP001 robot hand has motorized fingers, a powered thumb, silicone glove, and built-in actuation. Constructed from aluminum, zinc, steel, silicone, and plastic, it includes a beeper, custom wrist, RS485 protocol, foldaway design, and pressure springs.
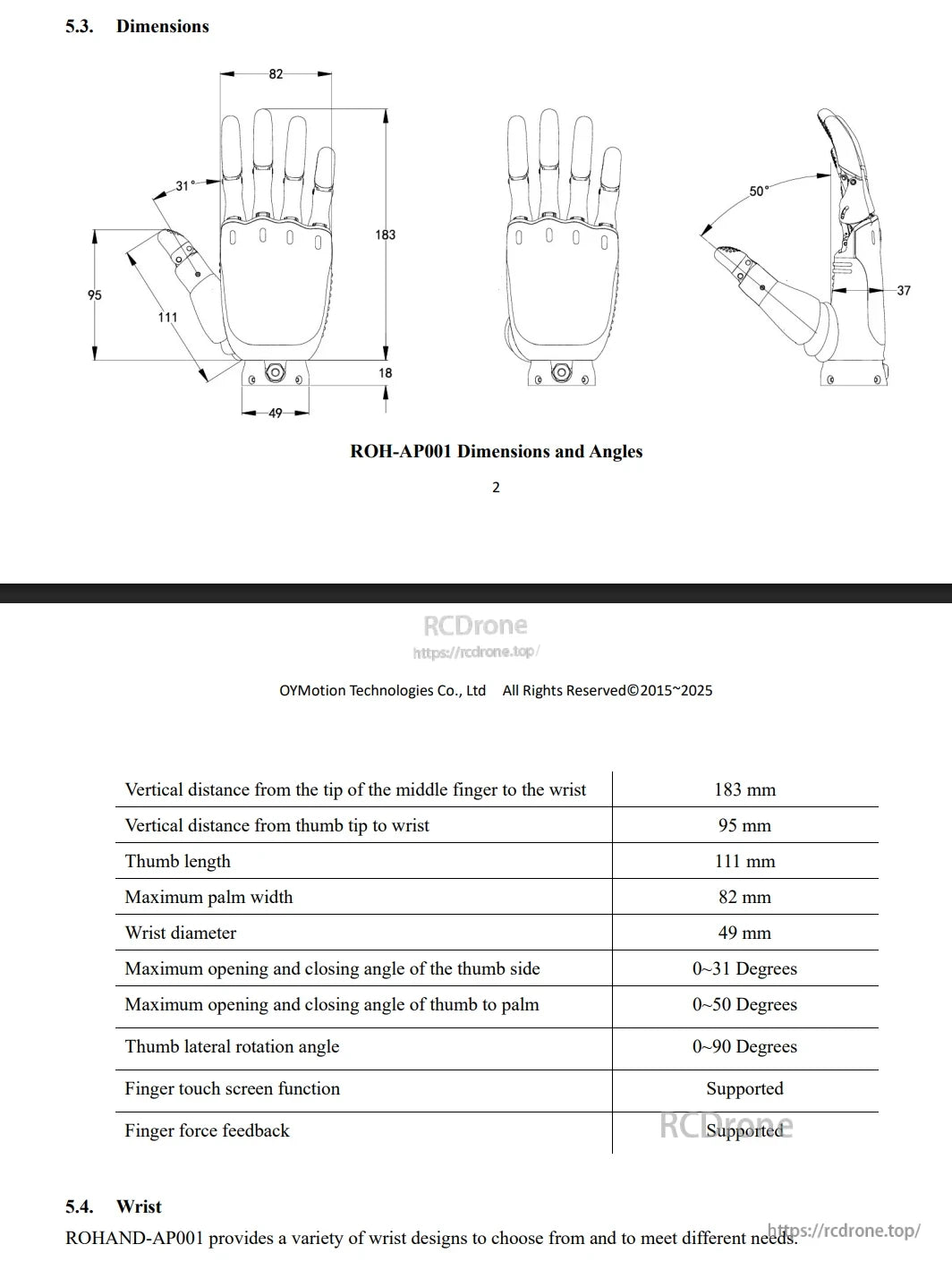
ROH-AP001 robot hand dimensions include 183mm finger-to-wrist height, 95mm thumb-to-wrist, 111mm thumb length, 82mm palm width, 49mm wrist diameter. Thumb angles: 0-31° side, 0-50° to palm, 0-90° rotation. Supports touch screen and force feedback.
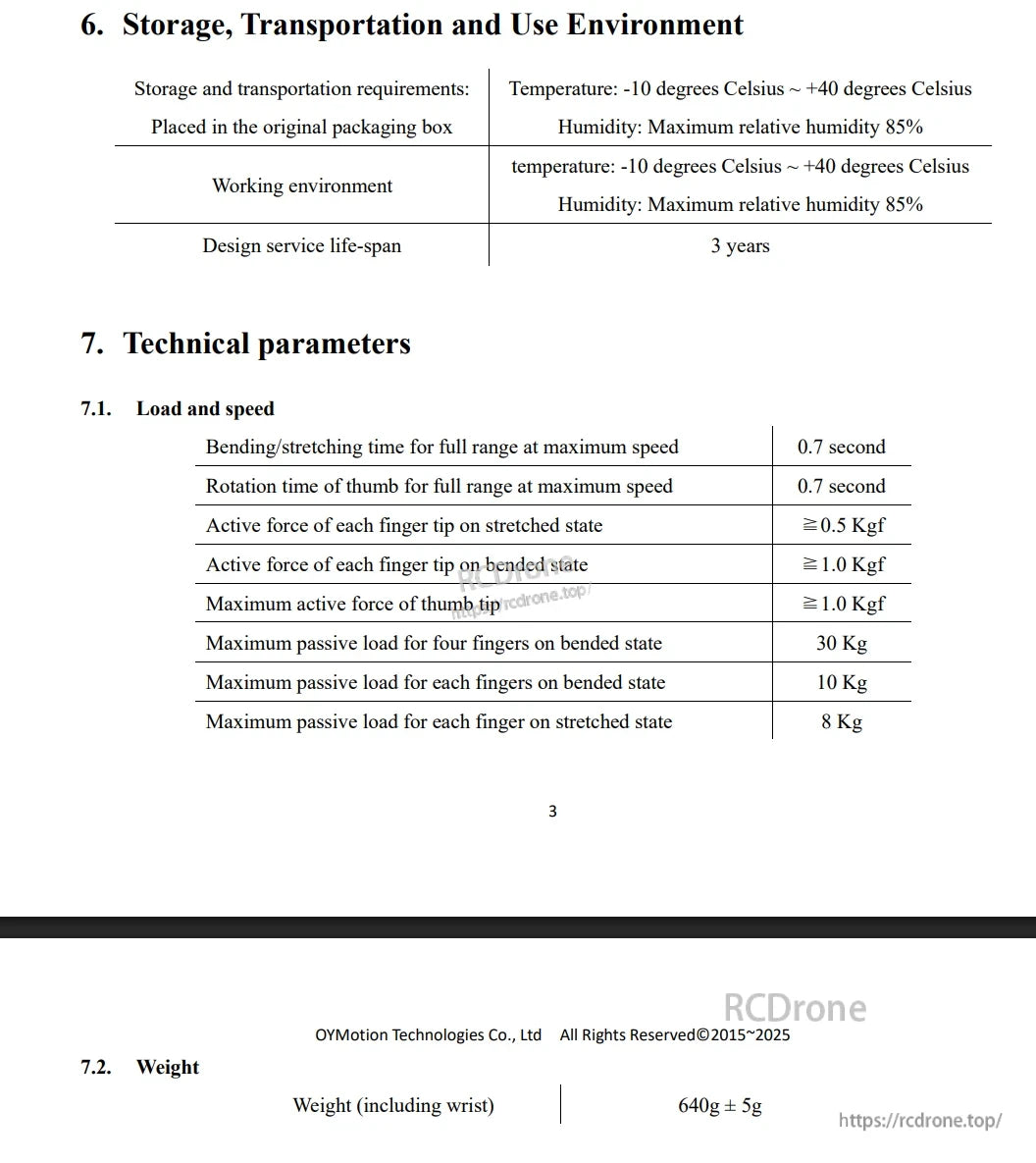
OYMotion ROH-AP001 robot hand operates between -10°C to +40°C, 85% max humidity. Design lifespan: 3 years. Weight: 640g ±5g. Finger active force ≥0.5–1.0 Kgf; passive load up to 30kg for four fingers.
Related Collections





