






Rotorflight HELI405 RF Flight Controller for FBL Helis, Betaflight‑Based Gyro, PPM/Spektrum/FrSky, DShot ESC Support
Rotorflight HELI405 RF Flight Controller for FBL Helis, Betaflight‑Based Gyro, PPM/Spektrum/FrSky, DShot ESC Support
Flywing
Couldn't load pickup availability
Overview
The Rotorflight HELI405 RF is a Flight Controller designed for traditional single‑rotor RC helicopters and FBL heli systems. It runs Rotorflight (based on Betaflight) and integrates an ICM‑42688 gyro, SLP‑06 barometer and 16M Flash logging, offering advanced governor control to maintain constant headspeed, rich telemetry, and support for tail motor or tail servo setups. It supports DShot, Multishot, Oneshot and PWM ESC protocols and works with mainstream receivers including PPM, Spektrum, FrSky, CRSF, XBus, ELRS, SBUS and iBus.
Materials provided also show a compatible 2‑in‑1 60A ESC (Li‑Po 3–6S, Only DShot, 7.4V 5A S‑BEC) used with this controller to help maintain constant headspeed. D‑shot electrical adjustment to Bluejay firmware is supported.
Key Features
- Rotorflight firmware (Betaflight‑based) optimized for helicopters; adjustable from transmitter via Lua scripts.
- ICM‑42688 gyro and SLP‑06 barometer with 16M Flash Blackbox for recording flight data.
- Governor functions to maintain constant headspeed; supports PWM, Oneshot, Multishot and DShot ESC protocols.
- Telemetry: FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS, etc.
- Receiver support: PPM, Spektrum (DSM), FrSky, CSRF/CRSF, XBus, ELRS, SBUS, iBus.
- Tail motor or tail servo (760us/1520us) support, including bidirectional tail motor via DShot.
- Multiple rate types and visual curve configuration; two rescue modes per Rotorflight configuration.
- More IO: dedicated UART and GPS ports, plus built‑in barometer. Note: GPS function is under development (subject to official Rotorflight information).
- Telemetry/Lua on the field with OpenTX 2.3.12 or EdgeTX 2.5.0 or newer.
Ports and connectors
- Ports labeled: DSM, GPS, Micro USB, UART, SBUS, S1/S2/S3 (swash servos), TAIL, ESC, RPM, Voltage detection (5–30V).
- Plug definitions (per provided materials): 3P single‑wire plug = tail motor signal; 3P = main motor signal; 1.25 plug = voltage detection line (direct battery voltage output). Please use with caution.
- Main and tail motors use MR30 plugs.
Compatible ESC option (from provided materials)
- 2‑in‑1 60A ESC; Li‑Po 3–6S; Only DShot; 7.4V 5A S‑BEC.
- Designed to maintain constant headspeed; PWM ESC stabilization available via RPM line.
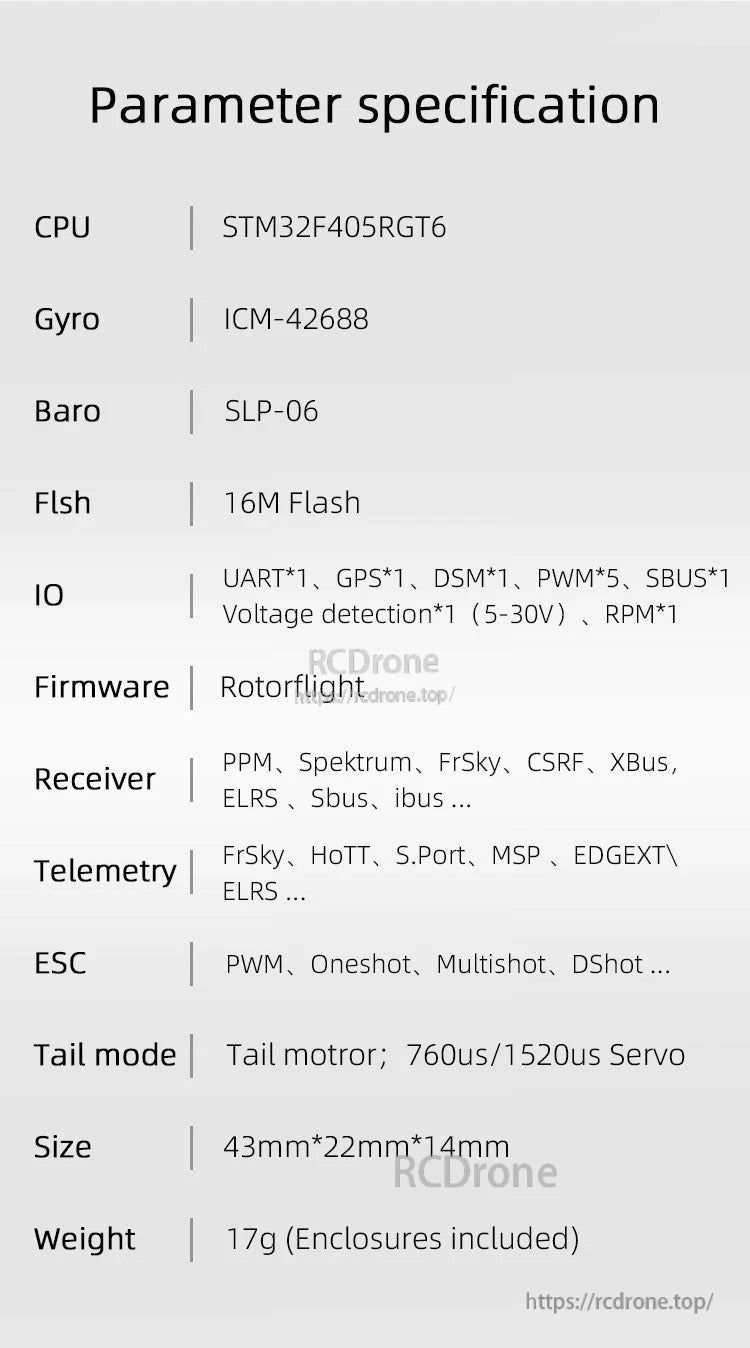
Specifications
| CPU | STM32F405RGT6 |
| Gyro | ICM‑42688 |
| Baro | SLP‑06 |
| Flash | 16M Flash |
| IO | UART*1, GPS*1, DSM*1, PWM*5, SBUS*1, Voltage detection*1 (5–30V), RPM*1 |
| Firmware | Rotorflight |
| Receiver | PPM, Spektrum, FrSky, CSRF, XBus, ELRS, Sbus, ibus ... |
| Telemetry | FrSky, HoTT, S.Port, MSP, EDGEXT\ ELRS ... |
| ESC | PWM, Oneshot, Multishot, DShot ... |
| Tail mode | Tail motor; 760us/1520us Servo |
| Size | 43mm*22mm*14mm |
| Weight | 17g (Enclosures included) |
Applications
- Traditional single‑rotor RC helicopters and FBL heli builds
- 3D flight setups requiring a governor, advanced gyro filtering and telemetry
- Platforms using tail motor or tail servo control
Details
Rotorflight HELI405 sports FBL heli system. Open source helicopter project based on BetaFlight. Features include tail motor, tail servo, ELRS, DShot ESC, telemetry, logging, transmitter adjustment, and constant headspeed maintenance.
Rotorflight is Betaflight-based flight software for single-rotor RC helicopters, featuring advanced PID control, rotor speed governor, gyro filtering, custom mixer, and flight profiles. Download links and details are available on the wiki.
STM32F405RG CPU, ICM-42688 gyro, SLP-06 baro, 16M flash. Supports multiple receivers, telemetry, PWM to DShot ESCs, tail motor mode. 43x22x14mm, 17g with enclosures.
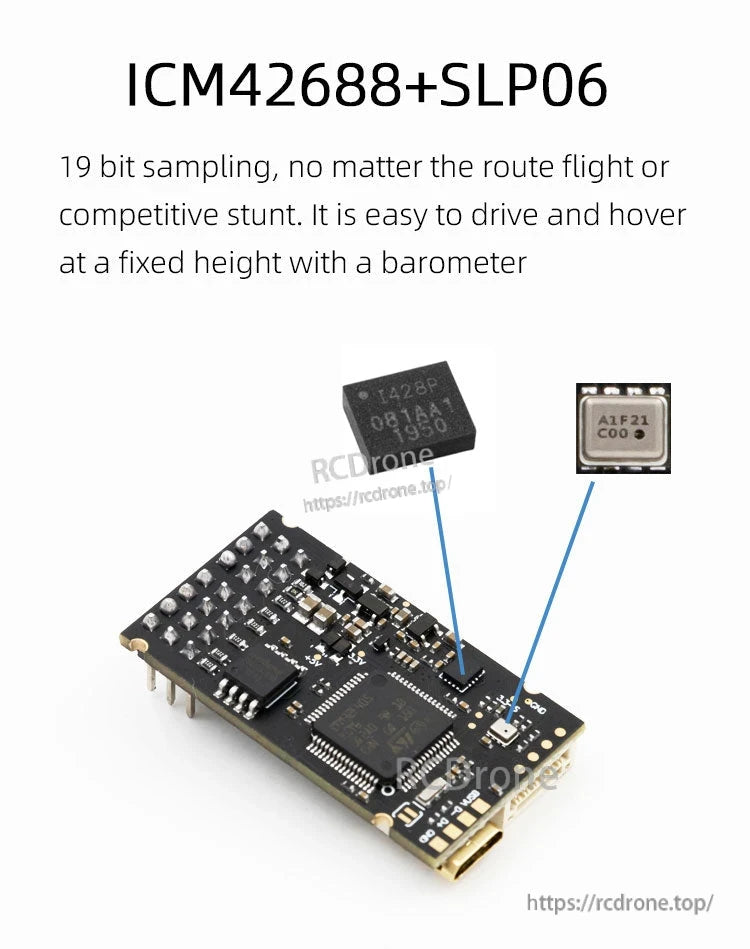
ICM42688+SLP06, 19-bit sampling, precise flight control, barometer for stable hover, easy to drive.

Heli405 flight controller has UART and GPS ports, supports serial receiver, built-in barometer. GPS in development. Extra IO ports for future upgrades. Compact design ideal for advanced drone applications requiring expandability and reliable sensor integration.

Supports multiple receivers including PPM, Spektrum, FrSky, CSRF, XBus, ELRS, SBUS, iBus via UART, DSM, and SBUS/PPM/iBus interfaces. Enables seamless transition to Rotorflight open source project without replacing the remote controller.
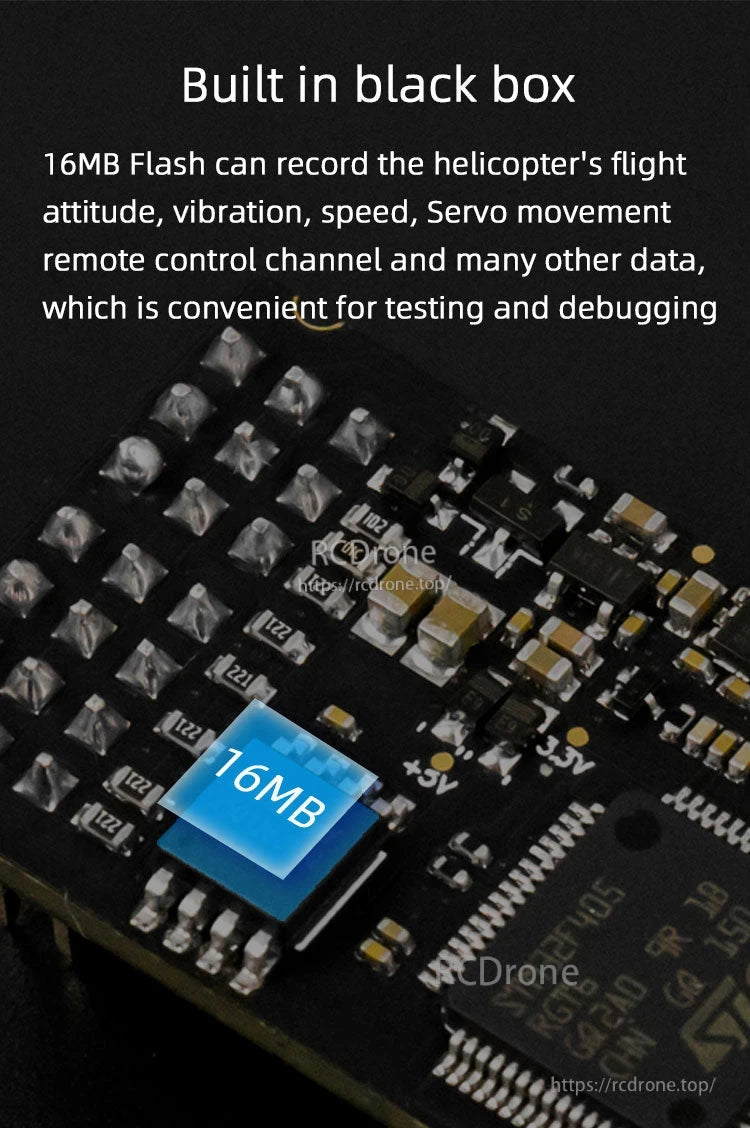
Built-in 16MB black box records flight data including attitude, vibration, speed, servo movement, and remote control channels for testing and debugging.
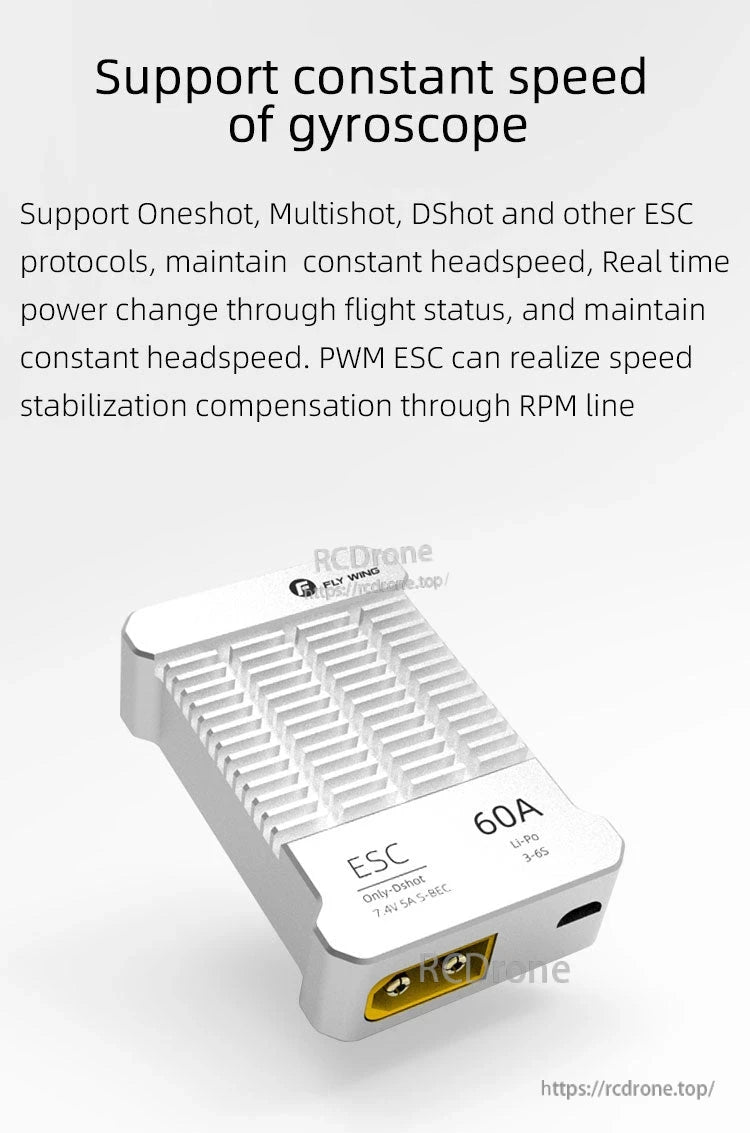
Supports constant gyroscope speed, Oneshot, Multishot, DShot protocols. Maintains constant headspeed with real-time power adjustment. PWM ESC enables RPM-based speed stabilization. 60A ESC for 3-6S Li-Po.
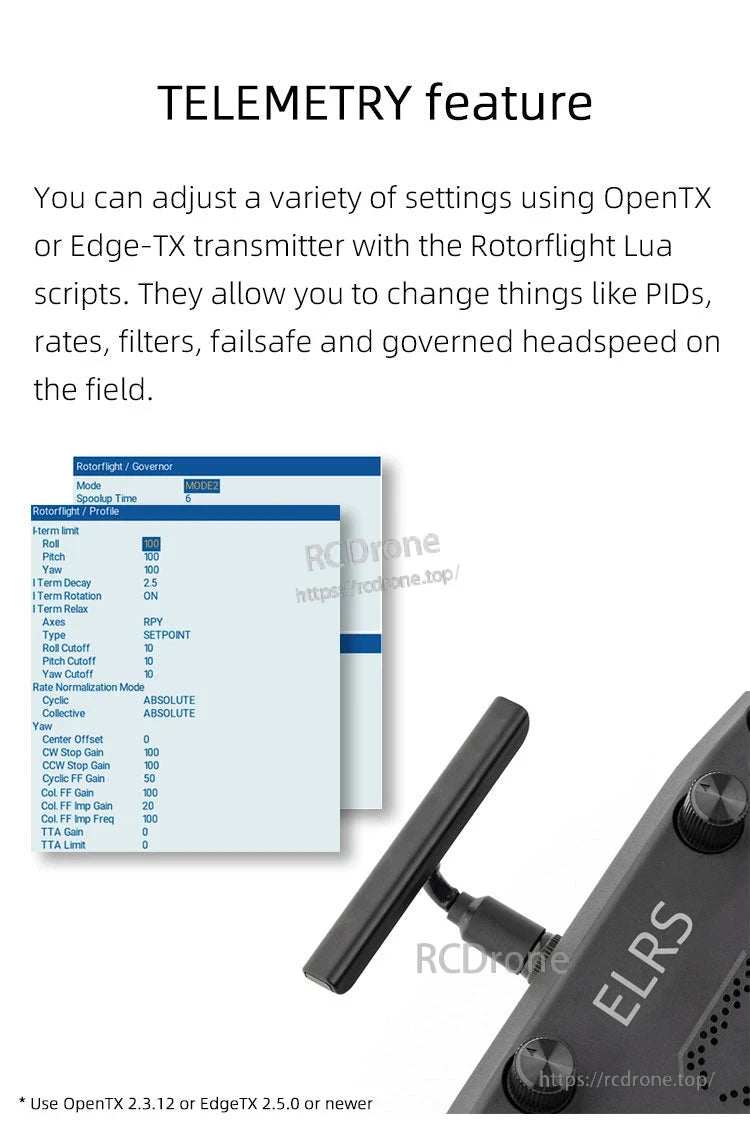
TELEMETRY feature allows field adjustments via OpenTX or Edge-TX with Rotorflight Lua scripts, enabling PID, rates, filters, failsafe, and headspeed control. Compatible with OpenTX 2.3.12 or EdgeTX 2.5.0+.
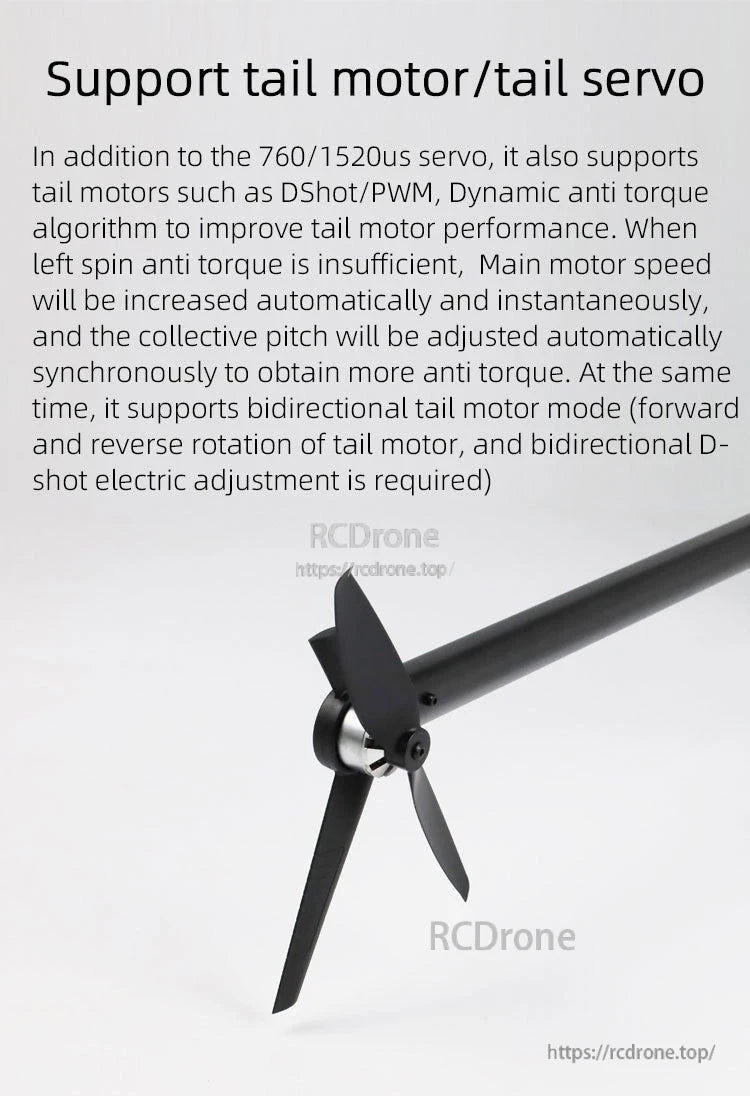
Supports tail motor and servo systems, including 760/1520us servo and DShot/PWM tail motors. Features a dynamic anti-torque algorithm that automatically boosts main motor speed and adjusts collective pitch to enhance anti-torque during left spin. Enables bidirectional tail motor operation for forward and reverse rotation, requiring bidirectional D-shot electronic speed control. Enhances tail motor performance and flight stability with advanced control logic. Designed for precision and responsiveness in demanding flight conditions, ensuring smoother yaw control and improved overall helicopter dynamics. Optimized for high-performance RC helicopters needing reliable torque management and seamless integration with modern digital systems.
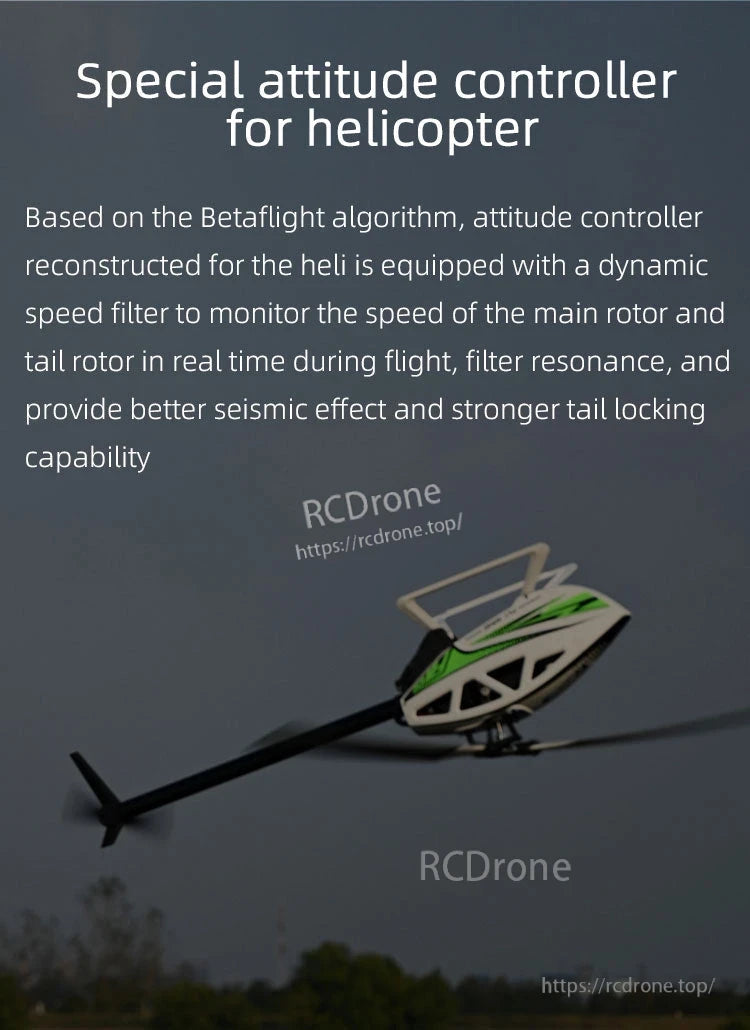
Special attitude controller for helicopter using Betaflight algorithm with dynamic speed filter for real-time rotor monitoring, resonance filtering, and enhanced stability.
Upcoming features include Hobbywing ESC or K-ESC data, such as voltage, current, and speed, displayed on the transmitter screen. GPS soft ground automatic rescue and return are also coming soon.
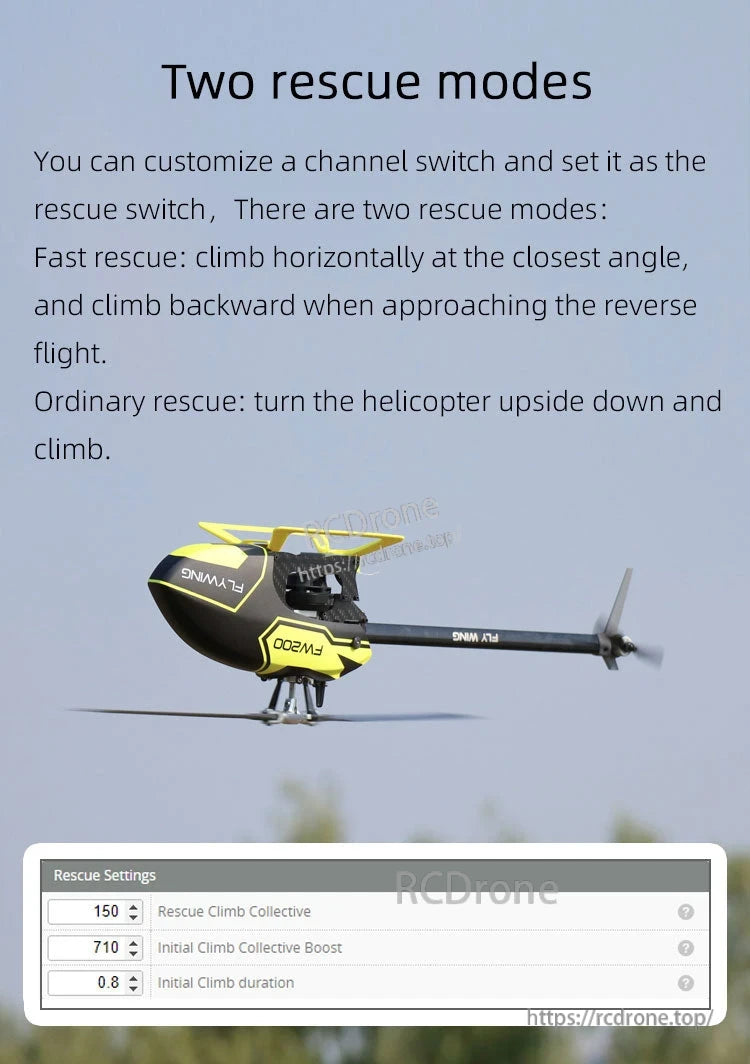
Two rescue modes: fast rescue climbs horizontally then backward; ordinary rescue flips helicopter upside down. Customizable channel switch. Settings include climb collective, boost, and duration.
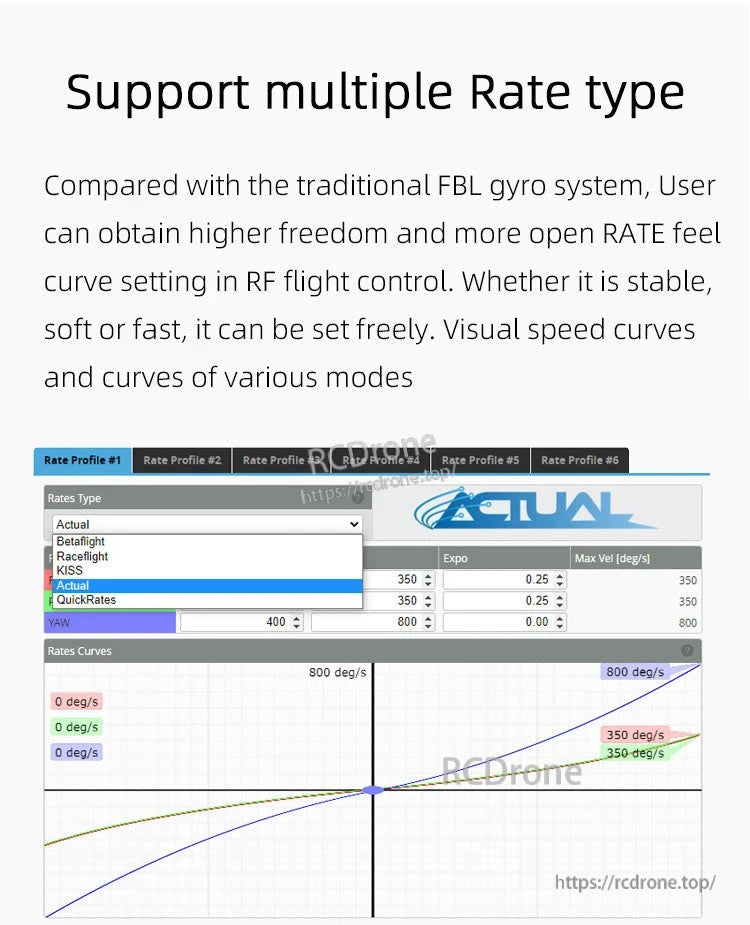
Supports multiple rate types, customizable RATE feel curves, visual speed curves, and mode profiles with adjustable expo and max velocity for stable, soft, or fast flight control.
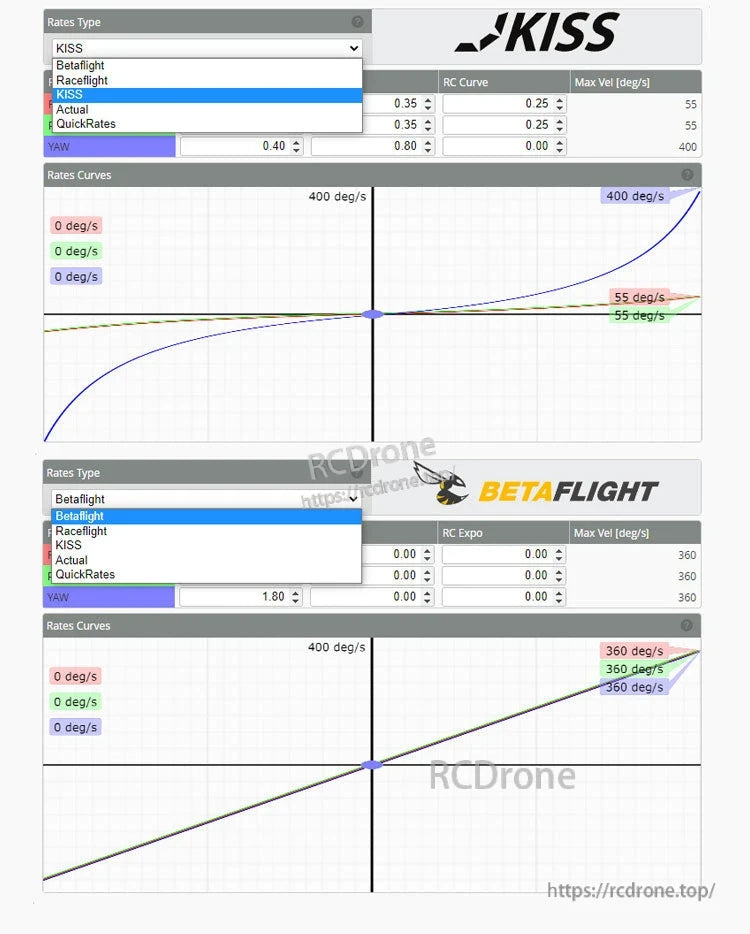
KISS Betaflight RC curve rates with max velocity in degrees. Actual values are 0.35 and 0.25 for quick rates. Yaw rates are 0.40, 0.80, and 0.00. Four-channel rates curves available at 400 degrees per second.
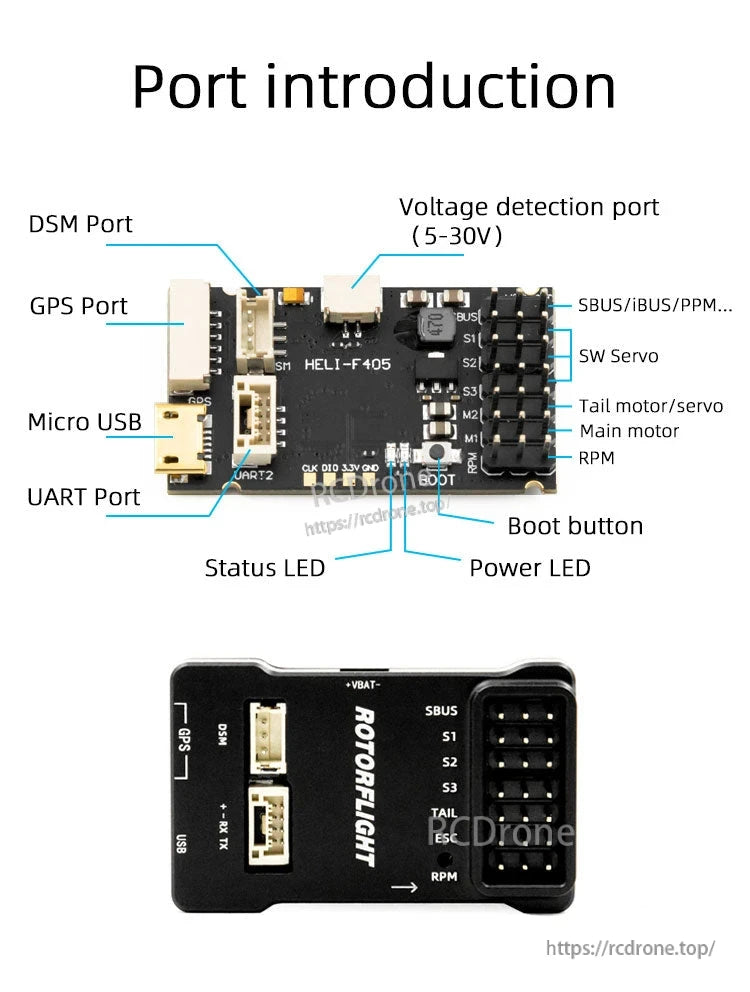
Rotorflight HELI-F405 flight controller supports DSM, GPS, Micro USB, UART, 5-30V voltage detection, SBUS/iBUS/PPM, servo and motor outputs, RPM monitoring, boot button, and status/power LEDs.
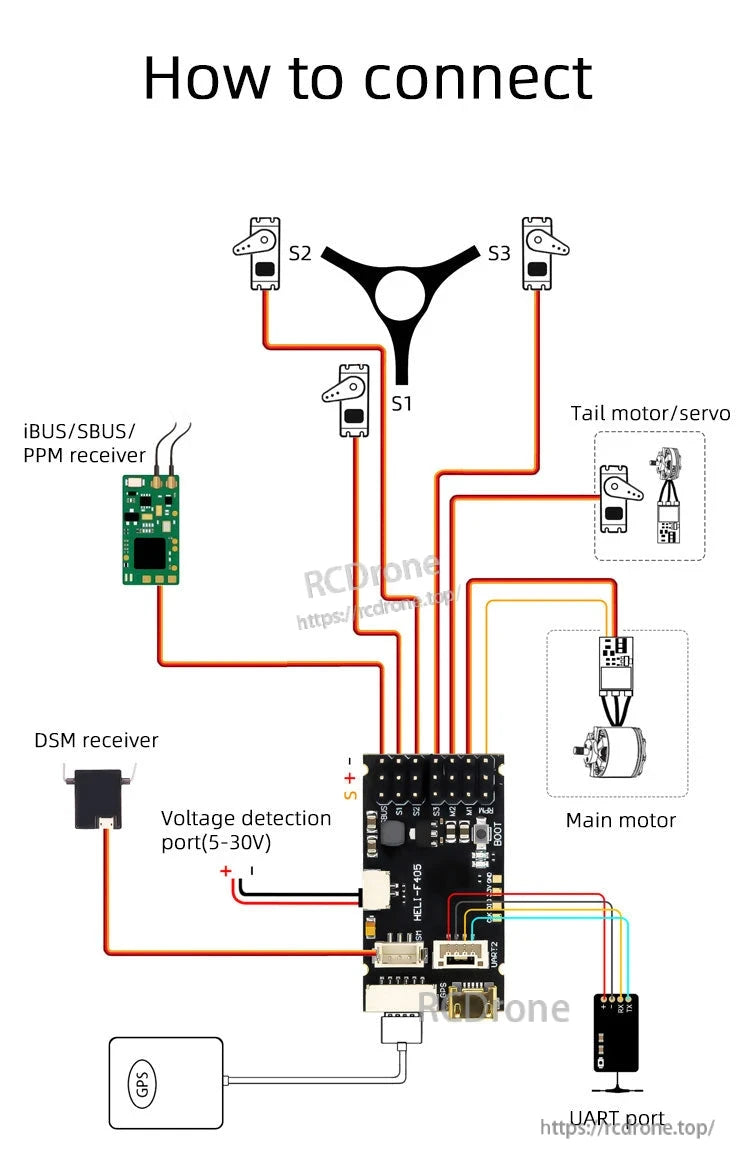
Connection diagram for HELI-P405 flight controller with receiver, motors, GPS and UART.
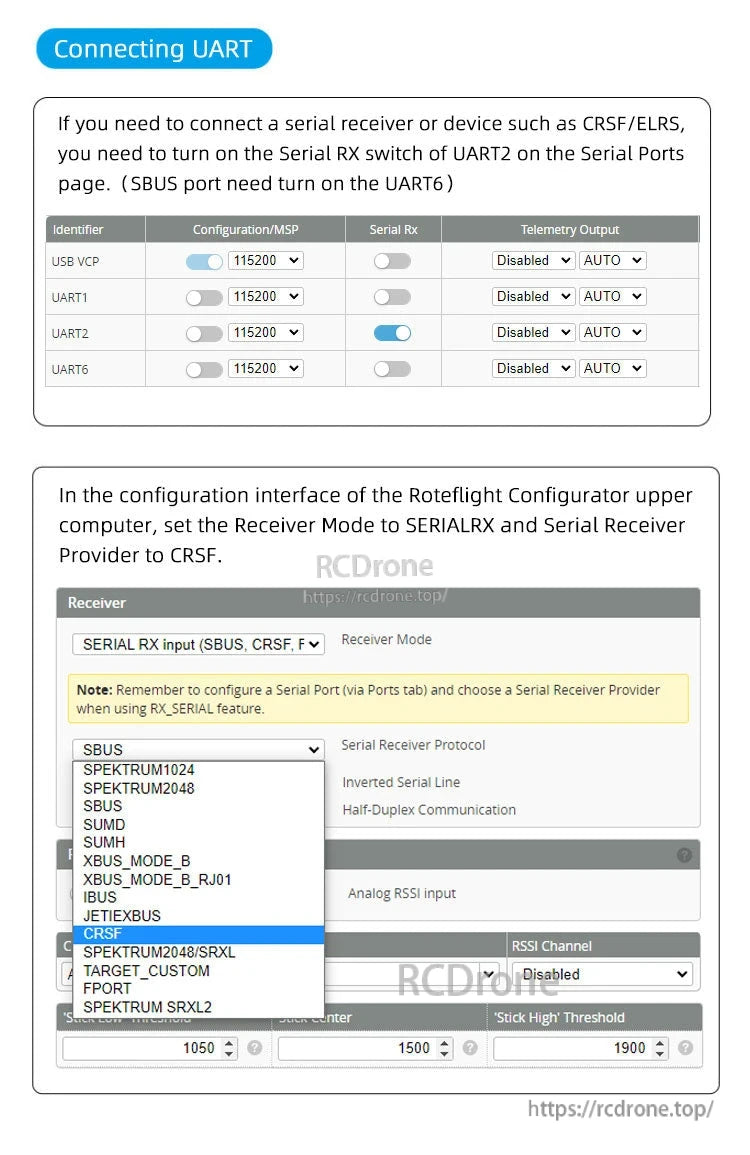
Configure UART2 for CRSF/ELRS serial receiver via Serial Ports. Set Receiver Mode to SERIALRX and Serial Receiver Provider to CRSF in Rotorflight Configurator. Enable UART2 Serial Rx and select CRSF from dropdown list.
Related Collections







