









SteadyWin GIM3510-8 small robot joint module, 8:1 planetary gear, CAN driver, dual encoder, 24V 60W
SteadyWin GIM3510-8 small robot joint module, 8:1 planetary gear, CAN driver, dual encoder, 24V 60W
SteadyWin
Couldn't load pickup availability
Overview
The SteadyWin GIM3510-8 small robot joint module is an integrated robotic joint actuator that combines an Aloha motor, 8:1 planetary gear reducer, built-in communication driver, and dual encoders in a compact cylindrical package. With a nominal 24 V supply (wide 12–40 V or 12–48 V range depending on driver board), high output speed up to 564.6 rpm after reduction, and CAN bus communication, it is designed for agile humanoid robots, robotic arms, mobile platforms, and other multi-axis systems requiring precise, closed-loop motion control.
Key Features
- High-speed planetary reduction: 8:1 planetary gearbox with rated output speed of 535.5 rpm and maximum 564.6 rpm (GDZ34), suitable for fast-moving joints.
- Wide voltage range: Nominal 24 V operation with 12–40 V (GDZ34) or 12–48 V (GDS34) input range for flexible power system design.
- Efficient torque output: Torque constant up to 0.32 N.m/A with rated torque up to 1.68 N.m and peak torque up to 6.02 N.m, providing efficient power transmission for light to medium-duty robotic joints.
- Integrated driver with CAN bus: Built-in driver board (GDS34 or GDZ34) supports CAN communication for simplified wiring and networked control.
- Dual encoder feedback: 14-bit encoder on the driver and a second encoder on the output shaft for accurate position and speed feedback.
- Compact structure: Only 46 mm outer diameter with overall length from 46.5 mm (without driver) to 51.5 mm (with driver), enabling dense multi-joint layouts.
- Environmental durability: IP54 protection rating, operating temperature from -20°C to +80°C, and noise level below 60 dB.
- Protection functions: Over-temperature, over-voltage, and overload protection help maintain safe, reliable operation in continuous-duty robotic systems.
- Mechanical robustness: Supports up to 75 N axial load and 300 N radial load on the output shaft, with reducer backlash of 15 arcmin.
- Custom brake option: Supports custom brake integration for joints that require holding torque when unpowered.
For technical support, customization, or integration questions about the GIM3510-8 small robot joint module, please contact https://rcdrone.top/ or email [email protected].
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Specifications
| Parameter | Unit | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Model | - | GIM3510-8 | GIM3510-8 |
| Driver board model | - | GDS34 (SDC101) | GDZ34 |
| Nominal voltage | V | 24 | 24 |
| Voltage range | V | 12–48 | 12–40 |
| Rated power | W | 98 | 60 |
| Rated torque | N.m | 1.68 | 1.00 |
| Peak torque | N.m | 3.41 | 6.02 |
| Rated speed after reduction | rpm | 430 | 535.5 |
| Max speed after reduction | rpm | 529 | 564.6 |
| Rated current | A | 4.1 | 2.5 |
| Peak current | A | 8.30 | 25.30 |
| Phase resistance | ohm | 0.48 | 0.48 |
| Phase inductance | mH | 0.31 | 0.31 |
| Speed constant | rpm/V | 22.04 | 23.53 |
| Torque constant | N.m/A | 0.44 | 0.32 |
| Number of pole pairs | Pairs | 7 | 7 |
| Gear ratio | - | 8:1 | 8:1 |
| Gear type | - | Planetary | Planetary |
| Reducer gear material | - | ALU | ALU |
| Reducer gear backlash | arcmin | 15 | 15 |
| Motor weight without driver | g | 247.6 | 247.6 |
| Motor weight with driver | g | 259.6 | 259.6 |
| Size without driver (diameter x length) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Size with driver (diameter x length) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Max axial load | N | 75 | 75 |
| Max radial load | N | 300 | 300 |
| Noise | dB | <60 | <60 |
| Communication | - | CAN | CAN |
| Second encoder on output shaft | - | YES | YES |
| Protection grade | - | IP54 | IP54 |
| Operating temperature | °C | -20 to +80 | -20 to +80 |
| Encoder resolution (driver encoder) | bit | 14 | 14 |
| Separate encoder support | - | NO | NO |
| Custom brake support | - | YES | YES |
Manuals
- SteadyWin_GIM3510-8_Installation_Diagram.stp
- GlM3510-8_installation_drawing.pdf
- Gl3510-8_with_brake_installation_drawing.pdf
Details

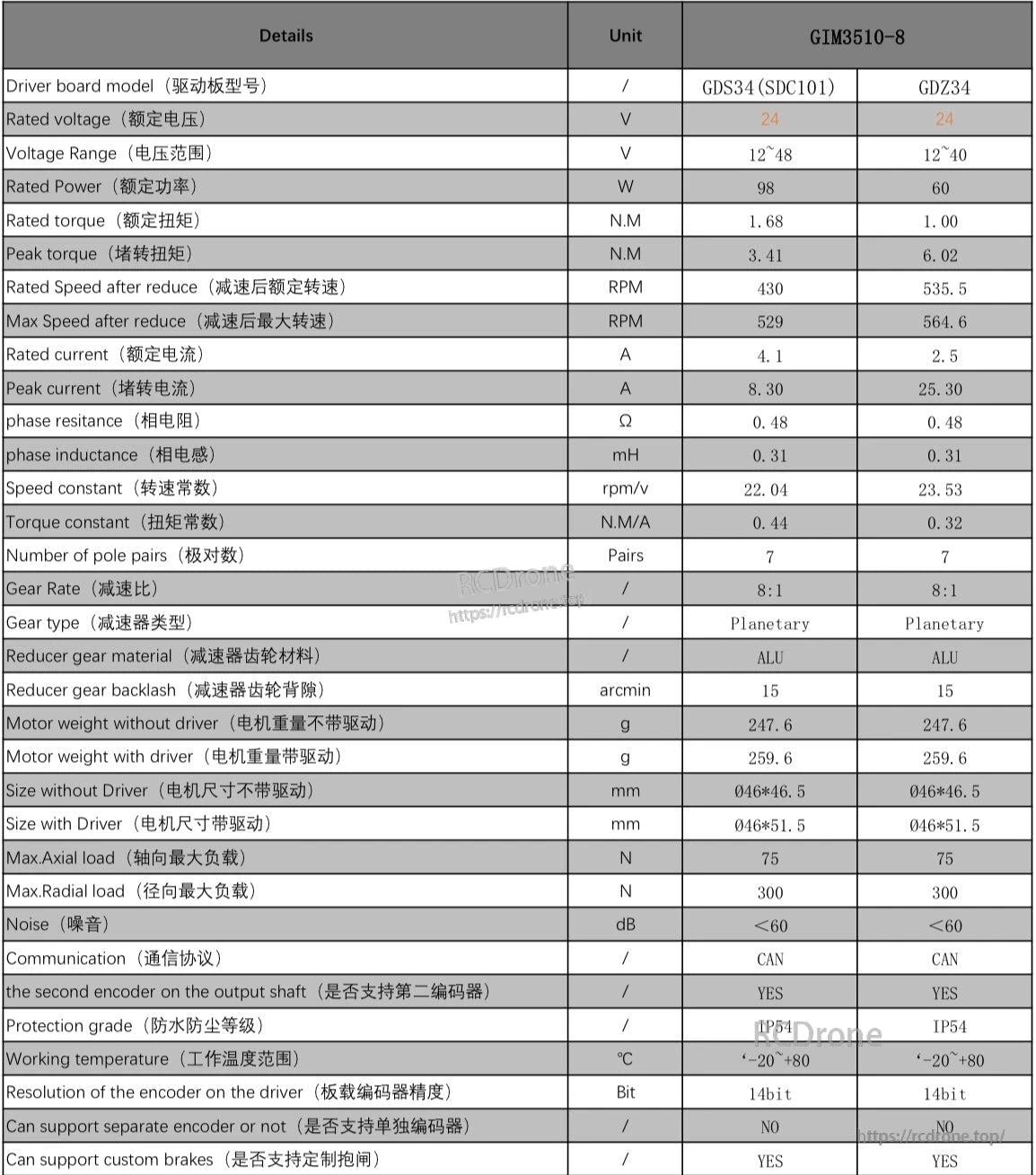
GIM3510-8 robot joint specs compare GDS34 and GDZ34 driver boards. Key metrics include voltage, power, torque, speed, current, weight, size, load capacity, noise, communication, encoder, protection grade, temperature range, and custom brake support.
Related Collections









