




SteadyWin GB1105CH Motor 12V 850RPM AS5048A Encoder, Slip-Ring Compatible, 12/14-bit Encoder Support
SteadyWin GB1105CH Motor 12V 850RPM AS5048A Encoder, Slip-Ring Compatible, 12/14-bit Encoder Support
SteadyWin
Couldn't load pickup availability
Overview
SteadyWin GB1105 Motor (Model: GB1105CH) is a compact, lightweight motor designed for smooth operation and stable low-speed performance. It is described as slip-ring compatible and compatible with 12-bit and 14-bit encoders, and is commonly used in gimbals, pods, and LiDAR-related payload mechanisms.
Key Features
- Compact, lightweight, and smooth operation
- Slip-ring compatible
- Compatible with 12-bit and 14-bit encoders
- Stable at low speeds
- Encoder type: AS5048A
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
- Gimbals
- Pods
- LiDAR payload mechanisms
Specifications
| Model | GB1105CH |
| Nominal Voltage | 12V |
| Nominal Torque | 0.01N·m |
| Nominal Speed | 850RPM |
| Max Speed | 18057 RPM |
| Nominal Current | 0.59 A |
| Stall torque | 0.01N·m |
| Stall current | 0.92A |
| Winding turns of motor | 50T |
| Phase resistance | 12.5Ω |
| Phase inductance | 1.15Mh |
| Speed constant | 108rpm/v |
| Torque constant | 0.01N.M/A |
| Rotor inertia | 15gcm^2 |
| Number of pole pairs | 6Pairs |
| Motor weight without encoder | 10g |
| Motor weight with encoder | 15g |
| Max demagnetize temperature | 120°C |
| Working Temperature | 20~80 °C |
| Encoder type | AS5048A |
Mechanical / Mounting (from drawing)
- With encoder housing: length 18.7±0.1; diameter φ16±0.05; mounting 3-M1.6 on φ12
- Without encoder housing: length 12±0.1; step 0.5; step 2; diameter φ7; diameter 15; diameter φ16±0.05; mounting 3-M1.6 on φ12
Manuals
For selection help or integration support, contact [email protected] or visit https://rcdrone.top/.
Details

Compact GB1105CH motor for smooth, stable low-speed motion in gimbals, pods, and LiDAR payload mechanisms.

AS5048A encoder integration supports 12-bit and 14-bit position feedback for precise control.

Slip-ring compatible construction helps simplify continuous-rotation wiring in rotating mechanisms.
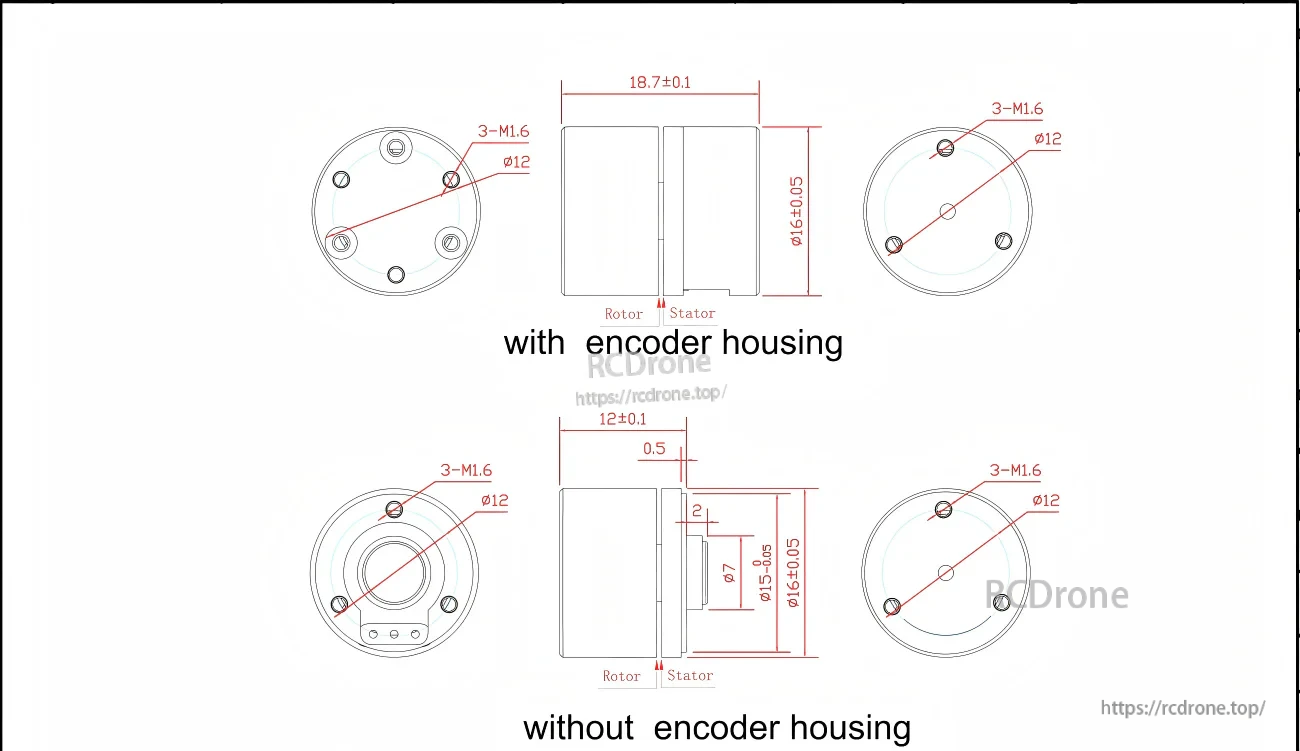
Mounting and envelope dimensions are provided for both encoder-housing and non-housing configurations.
Related Collections




