SteadyWin GIM4305-10 Planetary Reducer Motor — 48W, 10:1 Gear Ratio, 1 N·m Nominal Torque, 300–366 RPM, CAN, IP54 for Robotic Actuators
SteadyWin GIM4305-10 Planetary Reducer Motor — 48W, 10:1 Gear Ratio, 1 N·m Nominal Torque, 300–366 RPM, CAN, IP54 for Robotic Actuators
SteadyWin
Couldn't load pickup availability
Overview
The SteadyWin GIM4305-10 Planetary Reducer Motor is a compact planetary reducer motor with an integrated SDC101 driver and CAN communication. Designed for precision actuation, the unit operates at a nominal voltage of 24V (12-36V range), delivers 48W of power, and provides a nominal torque of 1 N·m (stall torque 3.47 N·m) after a 10:1 reduction. The GIM4305-10 is rated IP54 and supports a 14-bit encoder and separate encoder connection; custom brake support is available. Built-in protections include over-temperature, over-voltage and over-load monitoring.
For customer service and technical support contact: [email protected] or visit https://rcdrone.top/.
Key Features
- Planetary gear reducer, 10:1 ratio for increased output torque and positional control.
- Integrated SDC101 driver with CAN communication for networked control.
- Nominal speed after reduction 300 RPM, maximum 366 RPM.
- Encoder: 14-bit built-in, supports separate encoder input.
- Compact envelope Ø53×26mm and low mass (140g without driver; 150g with driver).
- Mechanical ratings: max axial load 125N, max radial load 500N, gear backlash 15 arcmin.
- Operating temperature range -20°C to +80°C and acoustic noise <60 dB.
- Reducer gear material: ALU or STEEL. Custom brake support available.
Specifications
| Model | GIM4305-10 |
| Driver Model | SDC101 |
| Nominal Voltage | 24V (12-36V range) |
| Power | 48W |
| Nominal Torque (after reduction) | 1 N·m |
| Stall Torque | 3.47 N·m |
| Nominal Speed (after reduction) | 300 RPM |
| Max Speed (after reduction) | 366 RPM |
| Nominal Current | 2A |
| Stall Current | 5.6A |
| Phase Resistance | 1.15 Ω |
| Phase Inductance | 0.41 mH |
| Speed Constant | 15.25 rpm/v |
| Torque Constant | 0.62 N·m/A |
| Number of Pole Pairs | 14 Pairs |
| Gear Ratio | 10:1 |
| Gear Type | Planetary |
| Reducer Gear Material | ALU or STEEL |
| Reducer Gear Backlash | 15 arcmin |
| Motor Weight (without Driver) | 140 g |
| Motor Weight (with Driver) | 150 g |
| Size (without Driver) | Ø53×26 mm |
| Size (with Driver) | Ø53×26 mm |
| Max Axial Load | 125 N |
| Max Radial Load | 500 N |
| Noise | <60 dB |
| Communication | CAN |
| Second Encoder | NO |
| Protection Grade | IP54 |
| Operating Temperature | -20°C to +80°C |
| Encoder Resolution | 14 Bit |
| Separate Encoder Support | YES |
| Custom Brake Support | YES |
Applications
- Humanoid robots and robotic joints
- Robotic arms and actuation modules
- Exoskeletons and wearable assistive devices
- Quadruped robots and leg joints
- AGV drive modules and mobile robotics
- Open-source robot projects (e.g., Pupper V3 integration)
Manuals
- GIM4305-10SHS Installation Diagram (PDF)
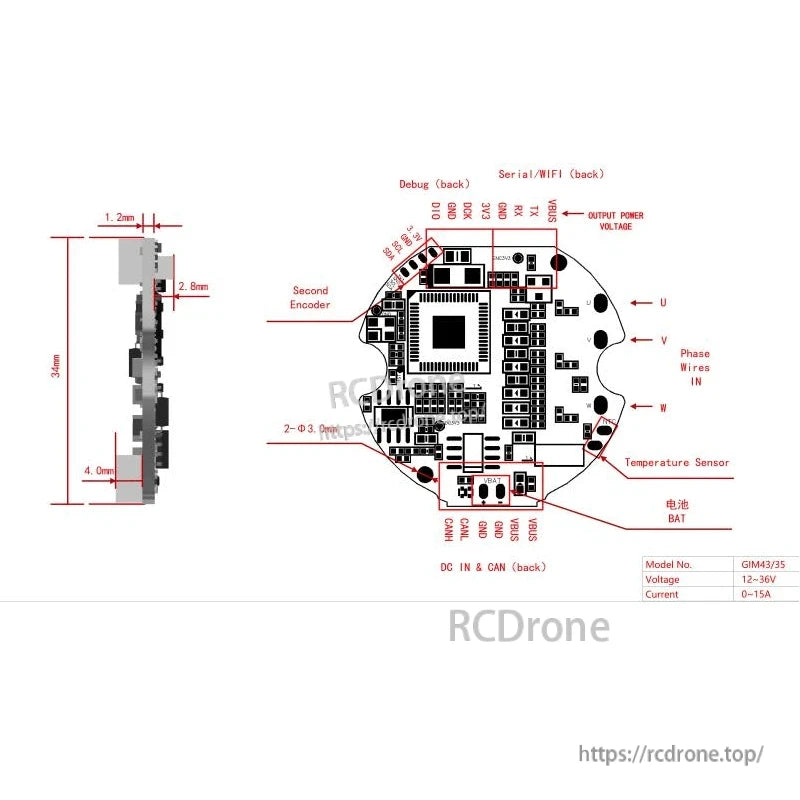
- GIM4305 Motor Interface Schematic Diagram (PDF)
- SteadyWin_GIM4305_10.stp
Details
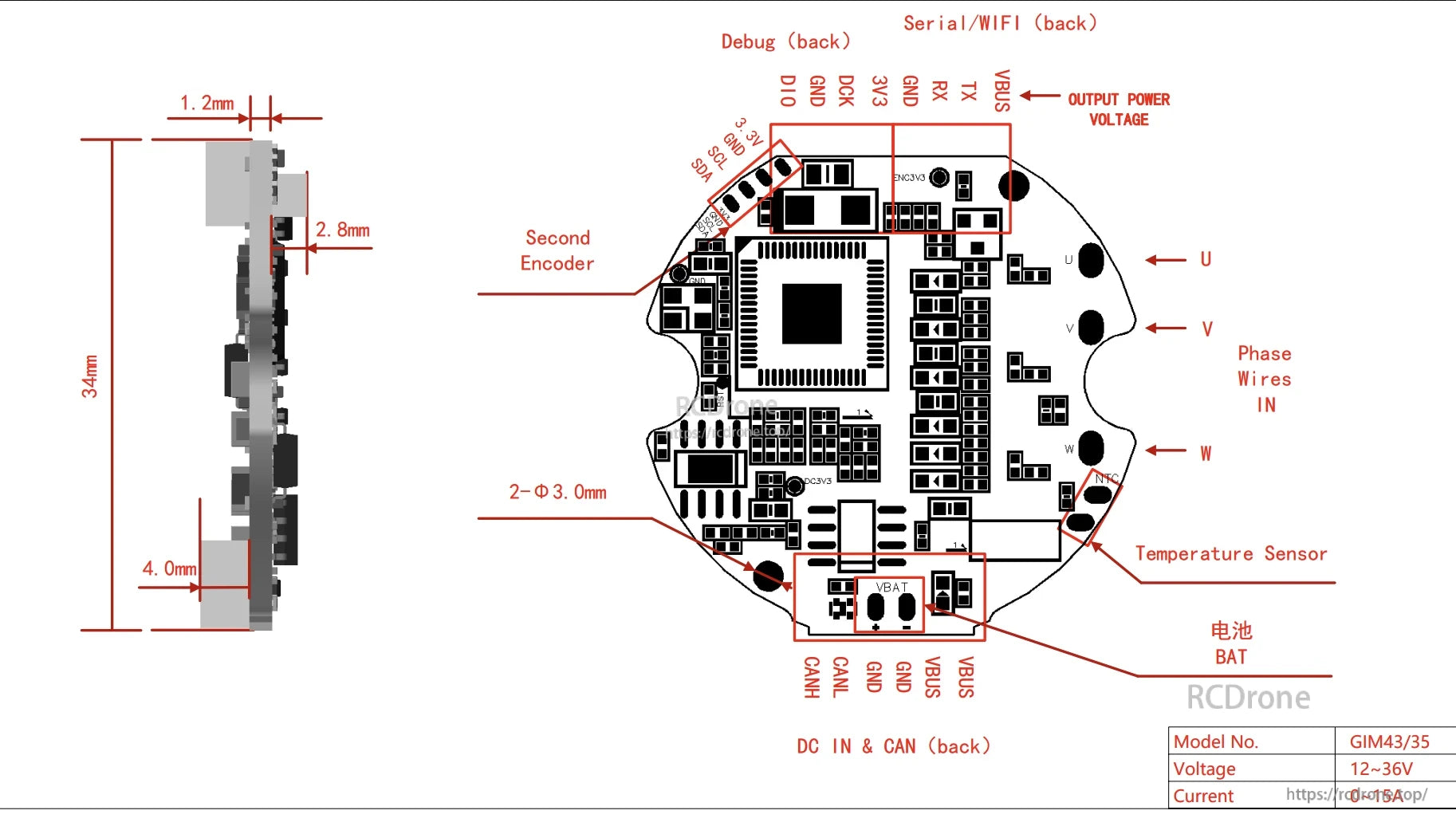
SteadyWin GIM43/35 motor PCB diagram shows connections, dimensions, and components—encoders, phase wires, temperature sensor, battery input, debug ports—operating at 12–36V and 0–15A current.
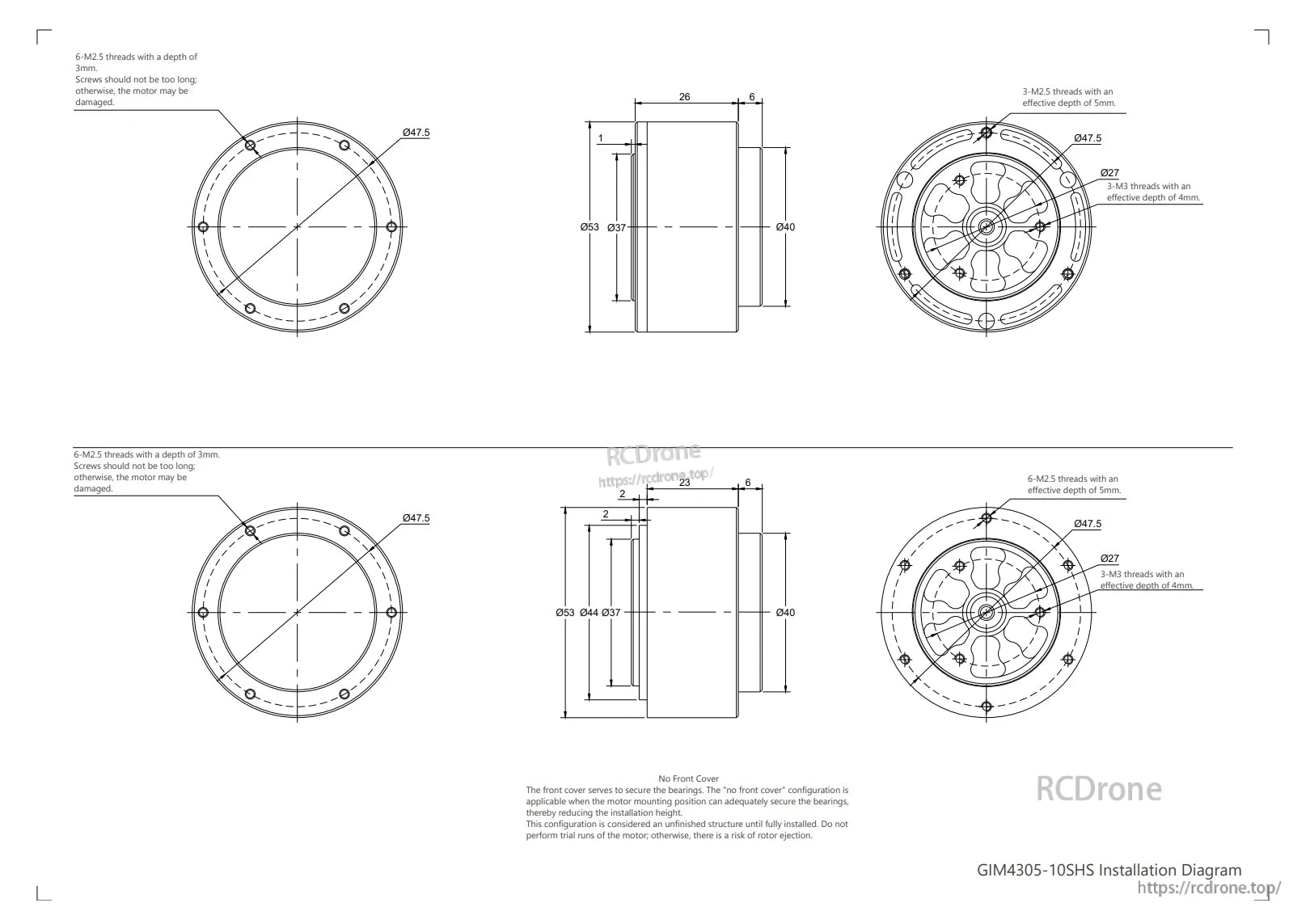
Technical diagram for GIM4305-10SHS motor installation shows dimensions, thread specs, screw-length warnings to prevent damage, and configurations with and without front cover.
Related Collections