Ti5 CRA-RI50-70-PRO-XX Integrated Robot Joint – Harmonic Gear, Hollow Shaft, 24–48V 150W, 17-bit Encoder, CAN/EtherCAT
Ti5 CRA-RI50-70-PRO-XX Integrated Robot Joint – Harmonic Gear, Hollow Shaft, 24–48V 150W, 17-bit Encoder, CAN/EtherCAT
Ti5 Robot
Couldn't load pickup availability
Overview
The Ti5 Robot CRA-RI50-70-PRO-XX is a compact, hollow-shaft integrated robot joint that combines a precision harmonic reducer, frameless torque motor, FOC drive, and absolute encoder in one module. With an 80 mm outer diameter, 10 mm thru-hole, 150 W power, and 24–48 V supply, it delivers up to 34 N·m peak (ratio-dependent) with near-zero backlash and low noise. Communication is selectable between CAN and EtherCAT; single or dual encoders and an electromagnetic brake variant (-B) are available. This joint is designed for cobots, mobile manipulators, pan-tilt gimbals, industrial equipment, power-inspection robots, and marine platforms.
Key Features
-
All-in-one joint: harmonic reducer + BLDC torque motor + FOC driver + absolute encoder in a sealed compact body.
-
Hollow shaft: 10 mm central pass-through for cables/air lines.
-
High-accuracy feedback: 17-bit absolute encoder, power-off multi-turn memory; single/dual-encoder options.
-
Low backlash output: harmonic stage with ~10–20 arc-sec backlash (per ratio).
-
Quiet & smooth: large-pole-count torque motor for low-speed stability and low acoustic noise.
-
Interface options: CAN or EtherCAT bus; optional holding brake (model suffix -B).
-
Customizable: waterproofing/low-temperature versions available from factory.
Models & Options
-
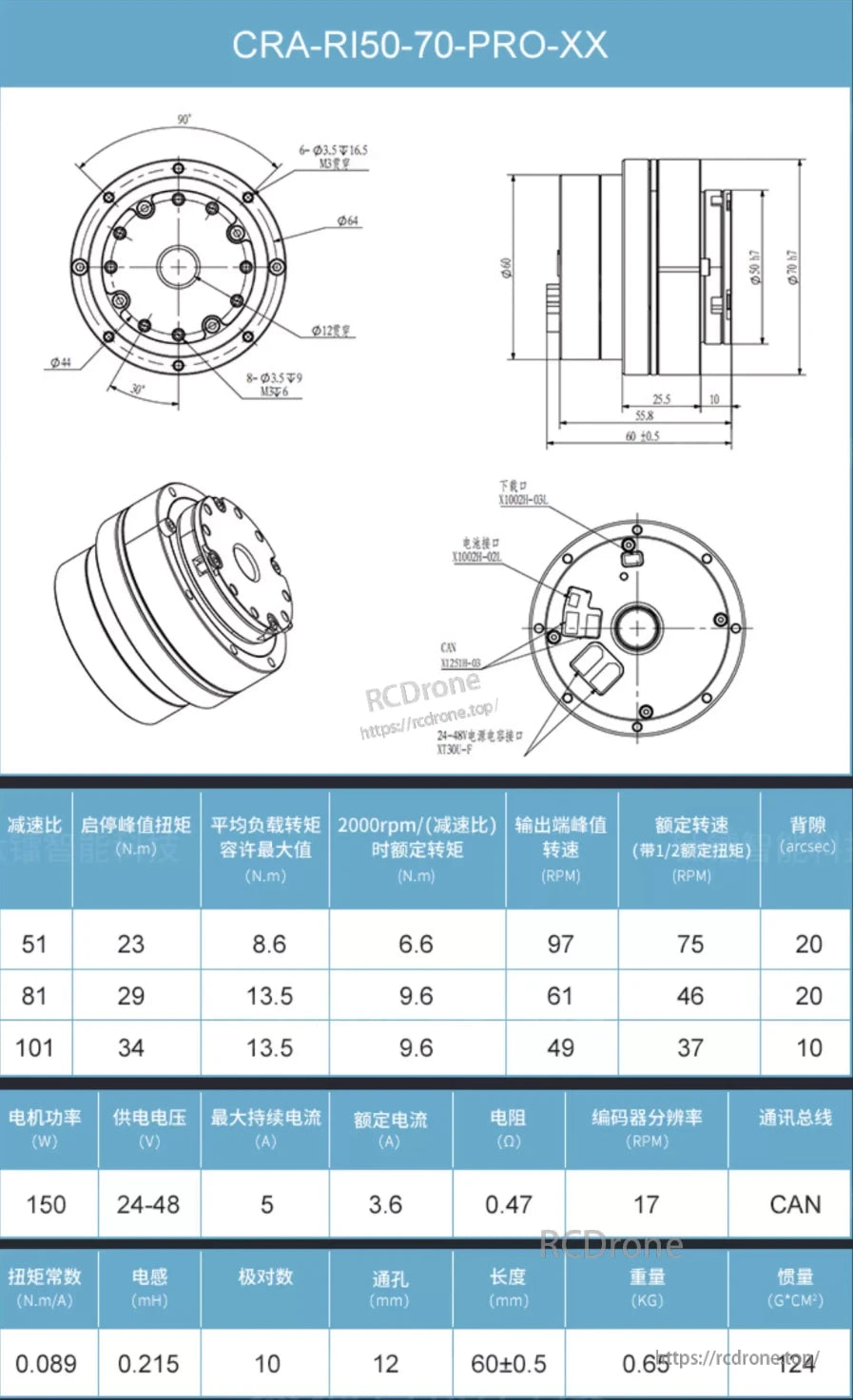
CRA-RI50-70-PRO-XX — standard, no brake (≈ 60 ± 0.5 mm length, ≈0.65 kg, inertia ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — with brake (length ≈81.7 ± 0.5 mm)
-
Bus: CAN or EtherCAT
-
Encoder: Single or Dual encoder
Rated Performance by Gear Ratio
| Gear ratio | Start/Stop Peak Torque (N·m) | Max Avg Load Torque (N·m) | Rated Torque @ 2000 rpm/ratio (N·m) | Peak Output Speed (rpm) | Rated Speed @ ½Trated (rpm) | Backlash (arc-sec) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13.5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13.5 | 9.6 | 49 | 37 | 10 |
Notes: Output speed/torque figures are at the reducer output. Lower backlash spec applies to the 101:1 variant.
Electrical & Motor Data
-
Power: 150 W
-
Supply voltage: 24–48 VDC
-
Max continuous current: 5 A | Rated current: 3.6 A | Phase resistance: 0.47 Ω
-
Torque constant: 0.089 N·m/A | Inductance: 0.215 mH | Pole pairs: 10
-
Encoder resolution: 17-bit absolute (power-off memory)
-
Field-oriented control (FOC) integrated
Mechanical Interface
-
Outer diameter: Ø80 mm
-
Bolt circle: Ø64 mm (front flange)
-
Through-hole: Ø10 mm
-
Overall length: 60 ± 0.5 mm (standard) / 81.7 ± 0.5 mm (-B with brake)
-
Mass: ~0.65 kg (standard)
-
Inertia (rotor): ~124 g·cm² (standard)
-
Front face provides multiple M3 fasteners; detailed hole pattern per mechanical drawing.
Connectivity
-
Bus: CAN or EtherCAT
-
Variants: Single-encoder / Dual-encoder
-
Brake option: -B models include an integrated holding brake.
Typical Applications
-
Collaborative and desktop robotic arms, service robots
-
Pan-tilt gimbals and camera systems
-
Mobile manipulation and power-inspection UGVs
-
Industrial automation modules and marine equipment
What’s Included
-
CRA-RI50-70-PRO-XX integrated joint (selected ratio & options)
-
Mating connectors & basic screws (per kit)
-
Mechanical drawing & pinout (digital)
Ordering Code (example)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: gear ratio (51/81/101)
-
B: with brake (blank = no brake)
-
T/2E: single/dual encoder options
-
IPXX: optional waterproof rating (on request)
Details

CRA-RI50-70-PRO-XX robotic joint specifications: 150W motor, 24-48V, CAN bus, 51-101 gear ratios, peak torque up to 34N.m, 60±0.5mm length, 0.65kg weight, 124g·cm² inertia.
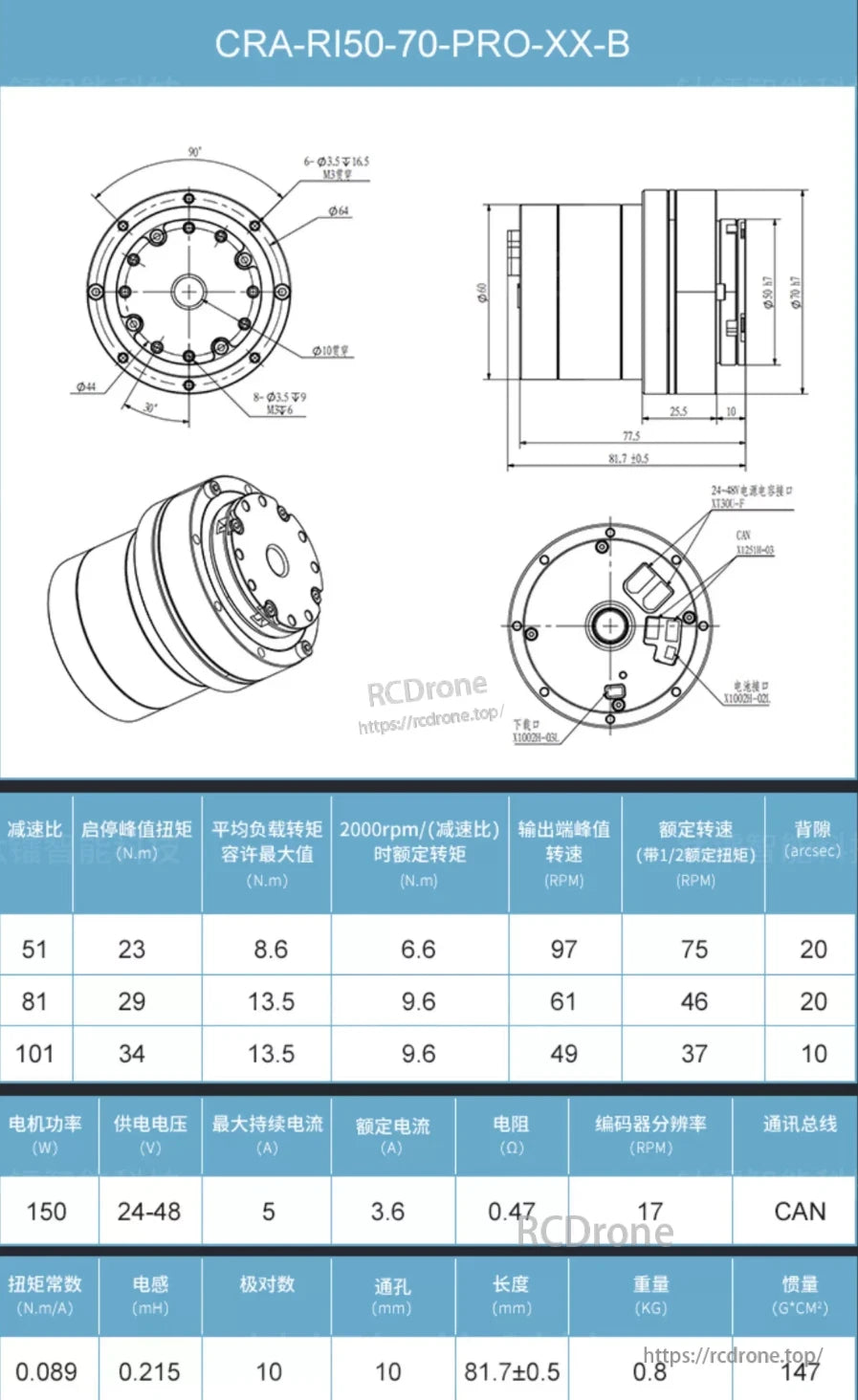
Robotic joint with 51, 81, or 101 gear ratios, 150W power, 24–48V supply, CAN communication, 17 RPM encoder resolution, 81.7±0.5mm length, and 0.8kg weight.
Related Collections