



Ti5 Robot CRA-RI40-52-PRO-XX Integrated Robot Joint Actuator, Harmonic Drive, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, Hollow-shaft, Single/Dual Encoder (Brake Option)
Ti5 Robot CRA-RI40-52-PRO-XX Integrated Robot Joint Actuator, Harmonic Drive, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, Hollow-shaft, Single/Dual Encoder (Brake Option)
Ti5 Robot
Couldn't load pickup availability
Overview
The Ti5 Robot CRA-RI40-52-PRO-XX is a compact, integrated joint module combining a frameless torque motor, precision harmonic reducer, servo driver and magnetic encoder in one IP65 unit. With 24–48 V DC supply and 90 W rated power, it delivers 7 N·m rated torque and 80 rpm rated output speed for humanoid robots, exoskeletons, collaborative arms, gimbals, AGVs and other high-end applications. A central pass-through hole supports cable routing; single- or dual-encoder configurations and a holding-brake option are available. Communication is CAN by default, with EtherCAT selectable.
Key Features
-
Integrated motor + drive + harmonic reducer + encoder (magnetic)
-
Rated torque 7 N·m; rated output speed 80 rpm; 90 W power
-
Two reduction ratios: 51:1 or 101:1
-
High precision: 17-bit encoder, typical backlash 40 arcsec (51) / 30 arcsec (101)
-
Low noise, low cogging; high torque density design
-
IP65 protection; optional low-temperature & waterproof customization
-
Communication bus: CAN (standard) or EtherCAT (optional)
-
Single-/dual-encoder options; brake or non-brake versions
-
Through-hole for wiring: 12 mm (standard) / 11 mm (brake)
-
Typical applications: humanoids, cobot joints, exoskeletons, pan-tilts, industrial equipment, power-inspection robots, marine/vehicle systems
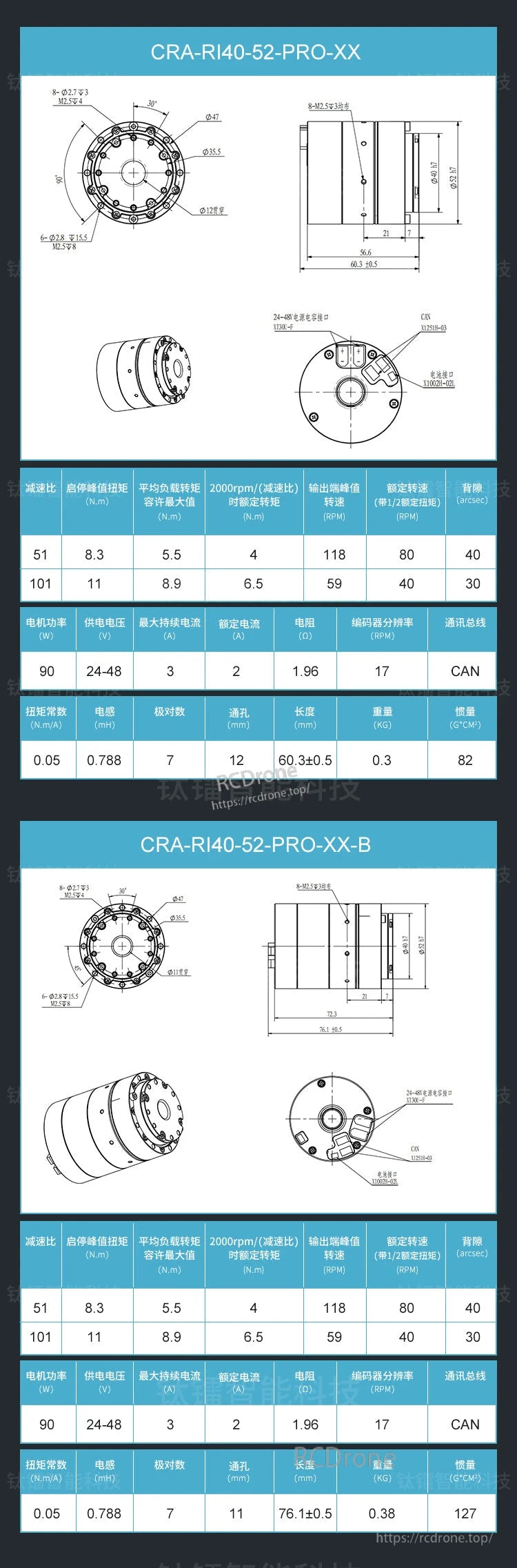
Performance by Gear Ratio
| Item | 51:1 | 101:1 |
|---|---|---|
| Start/stop peak torque (N·m) | 8.3 | 11 |
| Max. allowable avg. load torque (N·m) | 5.5 | 8.9 |
| Rated torque @ 2000 rpm/(ratio) (N·m) | 4 | 6.5 |
| Peak output speed (rpm) | 118 | 59 |
| Rated speed @ ½ rated torque (rpm) | 80 | 80 |
| Backlash (arcsec) | 40 | 30 |
Electrical Specifications
-
Supply voltage: 24–48 V DC
-
Rated/continuous current: 2 A (max continuous 3 A)
-
Phase resistance: 1.96 Ω
-
Inductance: 0.788 mH
-
Torque constant: 0.05 N·m/A
-
Pole pairs: 7
-
Encoder resolution: 17-bit (magnetic)
Mechanical & Interface
-
Protection grade: IP65
-
Rated output speed: 80 rpm
-
Communication: CAN (default) / EtherCAT (option)
-
Pass-through hole (for wiring): Ø12 mm (standard) / Ø11 mm (with brake)
-
Length & inertia (no-brake): 60.3 ± 0.5 mm, 82 g·cm²
-
Length & inertia (-B brake version): 76.1 ± 0.5 mm, 127 g·cm²
-
Mass: 0.3 kg
-
Cable length: 5 m
-
Operating ambient (typical): up to 60 °C
-
Materials: aluminum components with precision harmonic reducer
Variants & Options
-
Communication: CAN or EtherCAT
-
Encoder: single or dual magnetic encoder
-
Brake: non-brake (standard) or -B holding-brake version
-
Environment: customizable waterproofing and low-temperature package
-
Series notation: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (indicates reducer, torque sensor/encoder count, ratio, protection, etc.)
Typical Applications
Humanoid joints (shoulder/elbow/hip/knee), collaborative robot arms, exoskeleton actuators, pan-tilt/vision gimbals, industrial automation axes, power-inspection UGVs/AGVs, and marine/vehicle auxiliary mechanisms.
Notes
-
Install using the specified screw patterns and tolerances shown in the drawings.
-
Confirm ratio, encoder configuration, communication bus, and brake requirement before ordering.
-
Due to the industrial nature of this product, units installed/used are typically non-returnable; consult sizing docs with technical staff prior to purchase.
Details
Ti5 Robot Joint Actuator CRA-R140-52-PRO-XX and -B offer 90W power, 24–48V supply, 3A max current, 17 RPM encoder resolution, torque, speed, and CAN communication.

Ti5 Robot Joint Actuator model CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) includes brake, torque sensor, dual encoders, waterproof rating, reduction ratio, outer diameter, and motor type.

PRO series joint actuators for humanoid robots, exoskeletons, collaborative robots, automobiles, AGVs. Features: high robustness, long life, high torque density, low cogging torque, waterproof, dustproof, explosion-proof, low noise, high precision, hollow shaft design.
Related Collections



