










Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Joint Module (51/81/101/121) 16Bit Encoder
Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Joint Module (51/81/101/121) 16Bit Encoder
Ti5 ROBOT
Couldn't load pickup availability
Overview
The Ti5 ROBOT CRA-RI60-70-PRO Motor is a lightweight joint module designed for compact robotic joints where high torque density and precise feedback are required. It integrates key joint components such as the encoder, control board, motor stator/rotor, and harmonic reducers into a modular structure.
Key Features
- Lightweight, compact joint module: Small size design for space-constrained robotic joints.
- Ultra-lightweight concept: Stated reduction in weight by more than 1/3, helping reduce operating energy consumption.
- Stronger performance (stated): Industrial-grade performance standards; stated torque density is twice that of similar products.
- Modularization: Six modules are described as interoperable; three series are described as adaptable for different scenarios, supporting improved production efficiency.
- Integrated joint structure: Motor back cover, control board, encoder, stator housing, motor rotor, motor stator, harmonic reducers, and flexspline cover.
- Mass production advantage (stated): Underlying hardware described as controllable; a complete software toolchain is described for robot development and R&D acceleration.
- Torque density comparison graphic: Chart title shown as “Comparison of torque density of mainstream joint products (Nm/kg)” with values shown: 250+ (Ti5 Robot Next Generation), 254 (An American brand), 192 (Ti5 Robot mass production model), 80.4 (A Chinese brand), 53.5 (A Canadian brand), 33.8 (A Korean brand).
For selection support and integration questions, contact [email protected] or visit https://rcdrone.top/.
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Specifications
| Parameter | Value |
|---|---|
| Motor Model | CRA-RI60-70-PRO-XX / CRA-RI60-70-PRO-XX-B |
| Reduction Ratio | 51 / 81 / 101 / 121 |
| Start-stop Peak Torque | 42 / 53 / 66 / 66 N.m |
| Maximum Allowable Average Load Torque | 32 / 33 / 49 / 49 N.m |
| 2000 Rpm/(Reduction Ratio) Rated Torque at this speed | 19.8 / 27.5 / 30 / 30 N.m |
| Output End Peak Rotational Speed | 82 / 51 / 41 / 32 RPM |
| Rated Speed | 68 / 43 / 34 / 24 RPM |
| Motor Power | 300 W |
| Supply Voltage | 24-48 V |
| Maximum Continuous Current | 6.7 A |
| Rated Current | 5 A |
| Encoder Resolution | 16Bit |
| Back Clearance | 20 / 20 / 10 / 10 arcsec |
| Torque Constant | 0.096 N.m/A |
| Hole | 18 mm |
| Length: Without brake / With brake | 72.5±0.5 mm / 93±0.5 mm |
| Weight: Without brake / With brake | 0.73 kg / 0.88 kg |
| Inertia: Without brake / With brake | 394.8 g·cm² / 492 g·cm² |
Manuals
Details

A compact, lightweight joint module platform for space-constrained robotic joints that still need high torque density and precise feedback.

Integrated joint design combines the motor, encoder and drive electronics into a modular structure to simplify joint integration.


Core joint components—control board, encoder, motor rotor/stator, and harmonic reducer—are integrated into one joint-ready assembly.
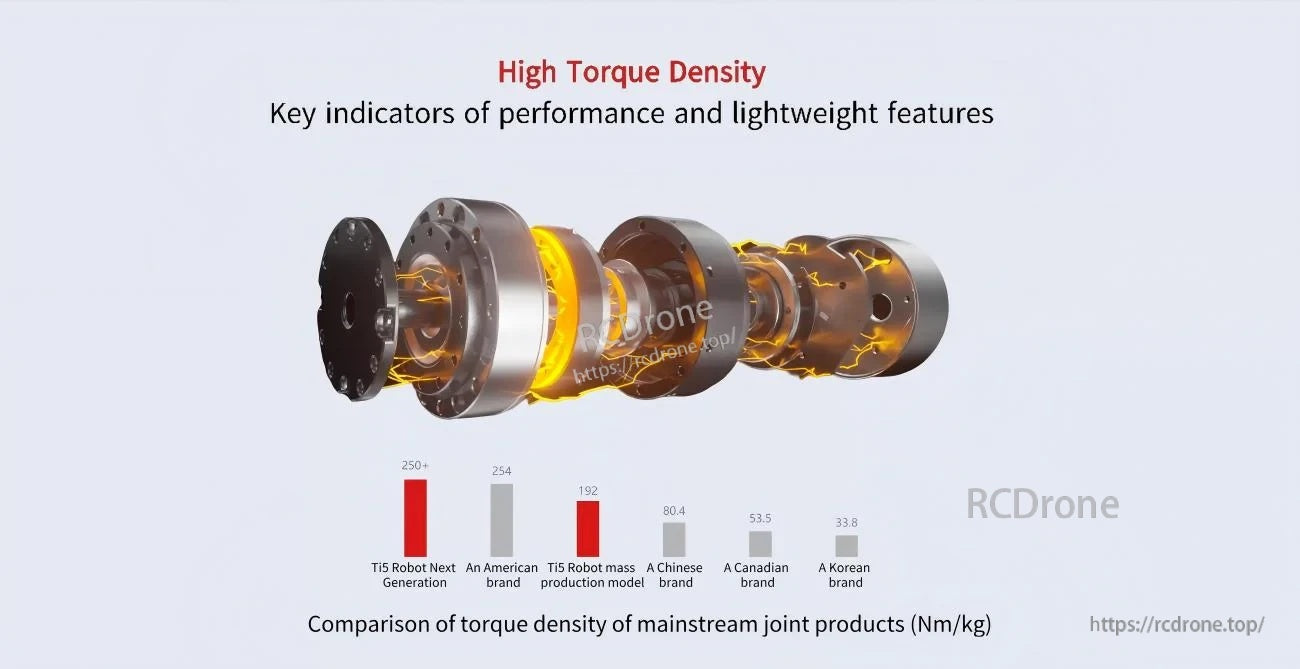
Torque density comparison (Nm/kg) helps benchmark joint-module performance across Ti5 Robot models and other mainstream products.
Related Collections










