


Ti5 Robot CRA-RI60-70-PRO-S-XX Hollow-Shaft Joint Actuator, 24–48 V CAN/EtherCAT, IP65, 51–102:1, up to 66 N·m peak, -B brake option
Ti5 Robot CRA-RI60-70-PRO-S-XX Hollow-Shaft Joint Actuator, 24–48 V CAN/EtherCAT, IP65, 51–102:1, up to 66 N·m peak, -B brake option
Ti5 Robot
Couldn't load pickup availability
Overview
The Ti5 Robot CRA-RI60-70-PRO-S-XX is a compact, hollow-shaft integrated robot joint for arms, humanoids, exoskeletons, UAV mechanisms and mobile platforms. It combines a frameless BLDC torque motor, precision reducer, magnetic absolute encoder (single or dual), and drive interface in one IP65 module. The PRO-S architecture prioritizes miniaturization and fast dynamic response while keeping a high load-to-weight ratio. Communication is CAN by default, with EtherCAT available. A factory brake version “-B” adds a holding brake for power-off safety. (All values below are read from the provided datasheets and product screenshots.)
Key Features
-
Hollow-shaft compact joint module (Ø60/Ø70 series) for easy cable and pneumatics routing
-
Ratios 51, 81, 101, 102 with low backlash (down to 10 arcsec depending on ratio)
-
Peak torque up to 66 N·m; rated torque up to 30 N·m (2000 rpm/ratio condition)
-
Fast response; high load-to-weight design (≈0.69 kg standard / ≈0.84 kg with brake)
-
IP65 dust-/water-proof housing, aluminum structure
-
Magnetic absolute encoder, 17-bit; single- or dual-encoder options
-
24–48 V DC supply, CAN bus (EtherCAT optional); through-shaft Ø18 mm
-
“-B” variant adds power-off brake; longer body and higher inertia for holding
Specifications
Common electrical & mechanical
-
Motor power: 300 W
-
Supply voltage: 24–48 V DC
-
Max continuous current: 6.7 A; Rated current: 5 A; Phase resistance: 0.33 Ω
-
Torque constant: 0.096 N·m/A; Inductance: 0.074 mH; Pole pairs: 10
-
Encoder: magnetic absolute, 17-bit; single/dual selectable
-
Communication: CAN (EtherCAT optional)
-
Through-bore: 18 mm; Protection: IP65
Per gear ratio (CRA-RI60-70-PRO-S-XX)
| Ratio | Start/Stop Peak Torque (N·m) | Max Continuous/Avg Torque (N·m) | Rated Torque @ 2000 rpm/ratio (N·m) | Peak Output Speed (rpm) | Rated Speed @ ½ Rated Torque (rpm) | Backlash (arcsec) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Form factor & inertia
-
Standard (-XX): length 70.7 ± 0.5 mm; weight 0.69 kg; rotor inertia 382 g·cm²
-
With brake (-XX-B): length 89.7 ± 0.5 mm; weight 0.84 kg; rotor inertia 538 g·cm²
Other catalog data
-
Rated torque reference value: 30 N·m
-
Typical rated speed: 30 rpm (ratio-dependent)
-
Operating temperature: up to 60 °C
-
Mounting: screw mounting; keyed shaft interface
Notes: single/dual encoder, brake option, and bus type are selectable at order; EtherCAT shown as “Ether-cat” in the screenshots. All dimensions and ratings above are taken directly from the provided sheets for CRA-RI60-70-PRO-S-XX and CRA-RI60-70-PRO-S-XX-B.
Applications
-
6-axis collaborative and industrial robotic arms
-
Humanoid joints (shoulder, elbow, hip, knee)
-
Exoskeletons and rehabilitation devices
-
UAV gimbals/mechanisms and light manipulators
-
AGV/AMR mechanisms, small machine tools and lab automation
Details
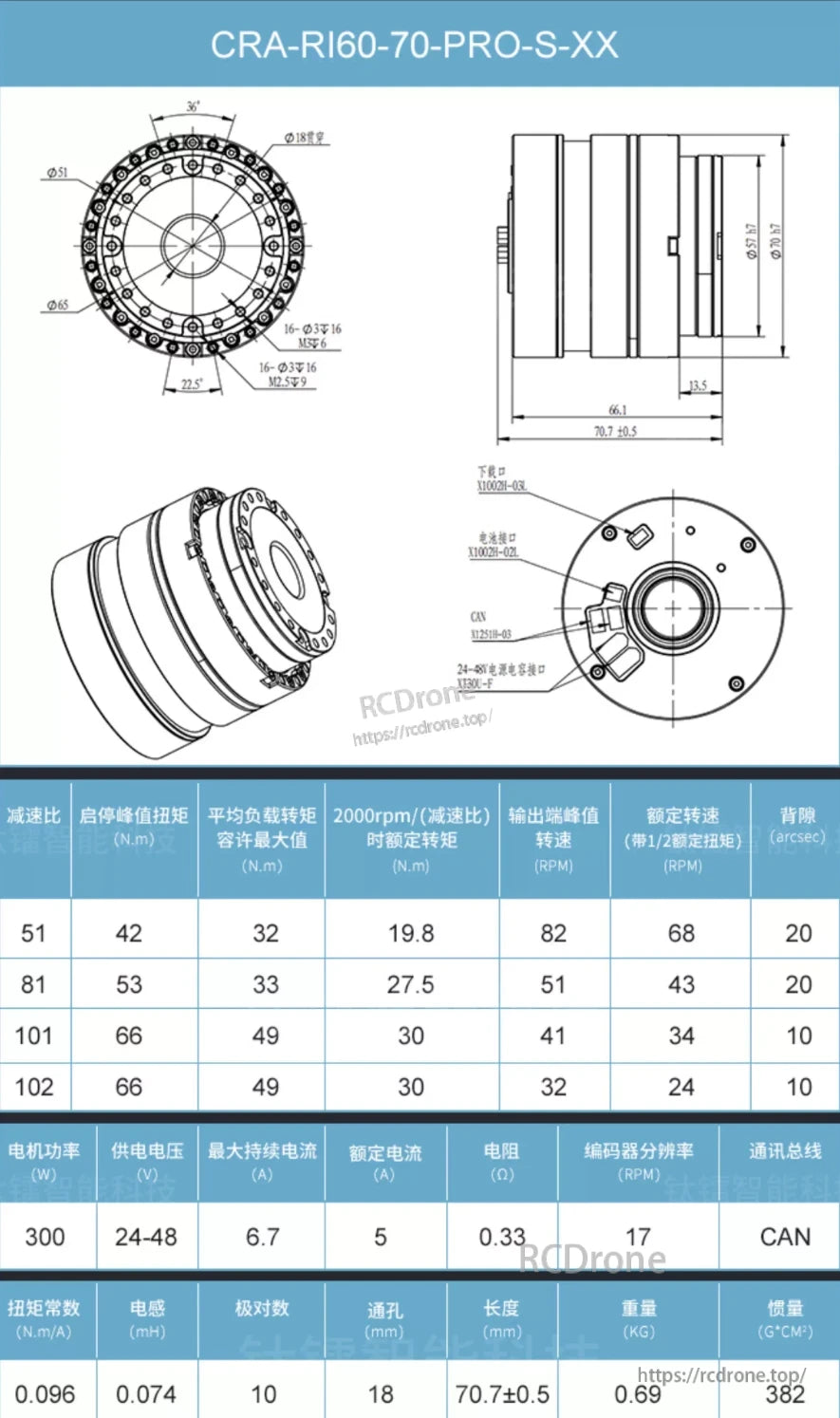
CRA-RI60-70-PRO-S-XX actuator specifications: 300W motor, 24-48V, 5A rated current, 17 RPM encoder resolution, CAN communication, 0.69kg weight, 382 G·CM² inertia, multiple gear ratios with torque and speed data.

CRA-RI60-70-PRO-S-XX-B actuator specifications: 300W motor, 24-48V, 5A rated current, 0.33Ω resistance, 17 RPM encoder resolution, CAN bus, 0.84kg weight, 538 G·cm² inertia. Dimensions: 89.7±0.5mm length, Ø70.37mm.
Related Collections


