








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Axis Accelerometer Gyroscope Inclinometer, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Axis Accelerometer Gyroscope Inclinometer, ROS/Matlab
WitMotion
Couldn't load pickup availability
Overview
The WitMotion HWT601-AGV-485 is a 6-axis attitude/heading sensor designed for AGV robots, drones and autonomous platforms. It combines 3-axis acceleration + 3-axis angular velocity and outputs 3-axis angle & quaternion through RS485 (Modbus) at up to 200 Hz. The module features Kalman dynamic filtering, high-precision turntable calibration, automatic/manual bias acquisition, backup power for heading save on power-off, and an IP67 waterproof/dustproof housing. It also supports multi-level cascading (up to 32 units) for synchronized attitude measurement.
Key Features
-
High-precision angle: XY accuracy 0.1°; Z accuracy 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Stable gyroscope bias: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Wide input 9–36 V, operating current ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Sampling: request–response reading up to 200 Hz.
-
Algorithm: Kalman filter fusion and dedicated AGV heading algorithm.
-
Software: free PC suite with live dashboards, curve plots, 3D visualization (car/sphere/cube/plane), configuration (bias, angle ref, accel calibration, scale factors), data recording & direct saving, and Matlab import.
-
Developer-friendly: example programs and code support for ROS, Linux, C/C#, Python.
-
Environmental: IP67, -40~80 °C (-40~85 °C table variant shown).
-
Cascading: up to 32 sensors on RS485 for simultaneous attitude measurement.
Installation Guidelines
-
Mount the sensor on a tight, flat, stable surface; uneven bases cause angle error (see FIG.1–2).
-
Keep the sensor axis parallel to the measured axis; avoid inter-axis angles (see FIG.3–4).
-
This model supports horizontal installation only.
Software & Visualization
-
Powerful Data Dashboard (angles, rate, accel, mag, quaternion, ports, temperature, voltage, etc.).
-
Configuration panel: baud rate, device address, auto bias acquisition, Z-axis reset, acceleration calibration, angle reference, manual positive/negative calibration and scale factors.
-
3D models for intuitive motion monitoring and real-time curves with dynamic updates.
-
Raw-data view and file saving for easy collection; Matlab analysis import supported.
-
ROS IMU INS demos: attitude tracking visualization and attitude data display (yaw/roll/pitch, angular velocity, linear acceleration).
Specifications
Interface & Performance
| Item | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interface / Protocol | RS485 / Modbus | RS485 / Modbus |
| Baud rate | 4,800–230,400 bps | 4,800–230,400 bps |
| Output data | 3-axis acceleration, angular velocity, angle, quaternion | Same |
| Sampling frequency | Up to 200 Hz (request–response) | Up to 200 Hz |
| XY angle accuracy | 0.1° | 0.1° |
| Z angle accuracy (360° rotation error) | 0.1° | 0.15° |
| Accel range / resolution | ±4 g / 0.0001 g/LSB | Same |
| Gyro range / resolution | ±250 °/s / 0.0122 (°/s)/LSB | Same |
| Angle range / resolution | XZ: ±180°; Y: ±90° / 0.0059° | Same |
| Gyro bias instability (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Temperature coefficient (XYZ) | 0.002°/°C | 0.002°/°C |
Electrical, Mechanical & Environment
-
Supply voltage: 9–36 V; Operating current: ≈ 8 mA (12 V)
-
Dimensions: 55 × 36.8 × 24 mm; Cable length: 1 m
-
Protection: IP67
-
Operating temperature: -40~80 °C (table variant also shows -40~85 °C)
-
Installation: Horizontal mounting only
-
Cascading: Up to 32 units on RS485
Application Areas
AGV/AMR and mobile robots, drones/UAVs, unmanned logistics vehicles, and autonomous driving perception modules.
Model Naming & Selection
-
HWT601-AGV-485 – higher Z-axis accuracy (0.1°) and lower Z-bias instability (2°/h).
-
WT601-AGV-485 – standard Z-axis specs (0.15°, 5°/h).
Choose HWT601 when Z-heading precision is critical.
Details

High-precision 6-axis attitude sensor with 3-axis acceleration, angular velocity, angle, and quaternion. Features AGV heading algorithm, IP67 protection, Kalman filtering, automatic bias acquisition, and PC software support.
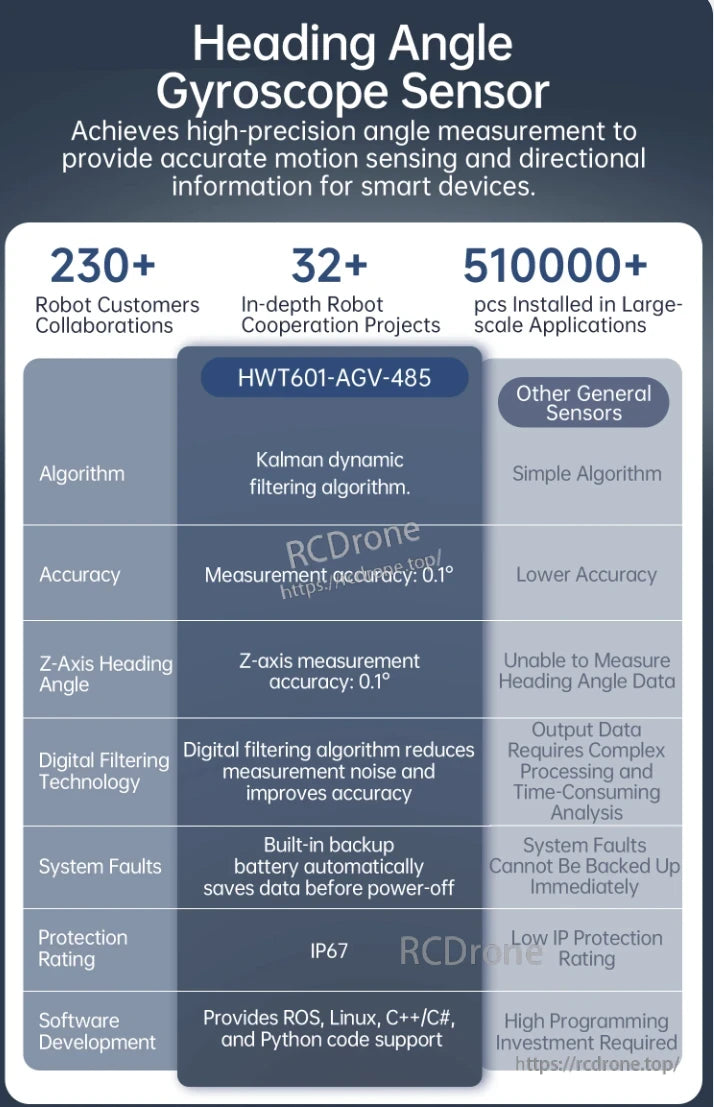
Heading Angle Gyroscope Sensor HWT601-AGV-485 offers high-precision angle measurement with Kalman filtering, 0.1° accuracy, digital noise reduction, IP67 protection, and supports ROS, Linux, C++, and Python. Over 230 robot collaborations and 510,000+ installations.
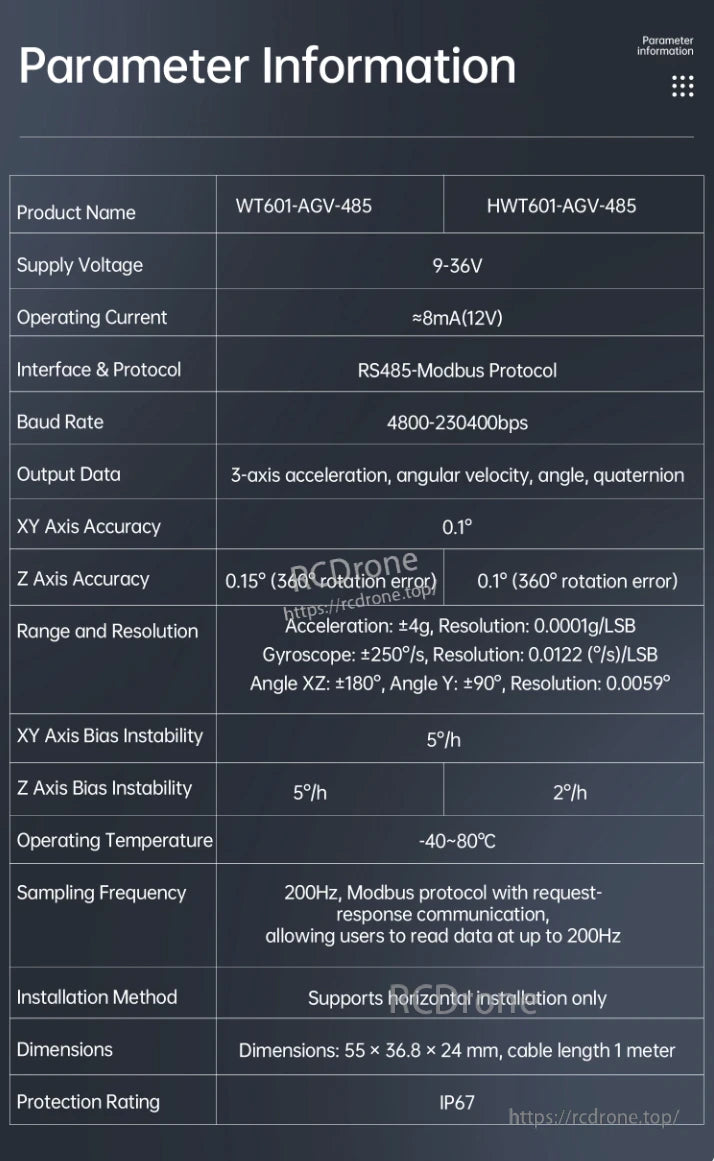
HWT601-AGV-485 IMU offers 9-36V supply, RS485-Modbus, 200Hz sampling, ±4g acceleration, ±250°/s gyroscope, IP67 rating, -40~80°C operation. Provides accurate, high-resolution 3-axis data.
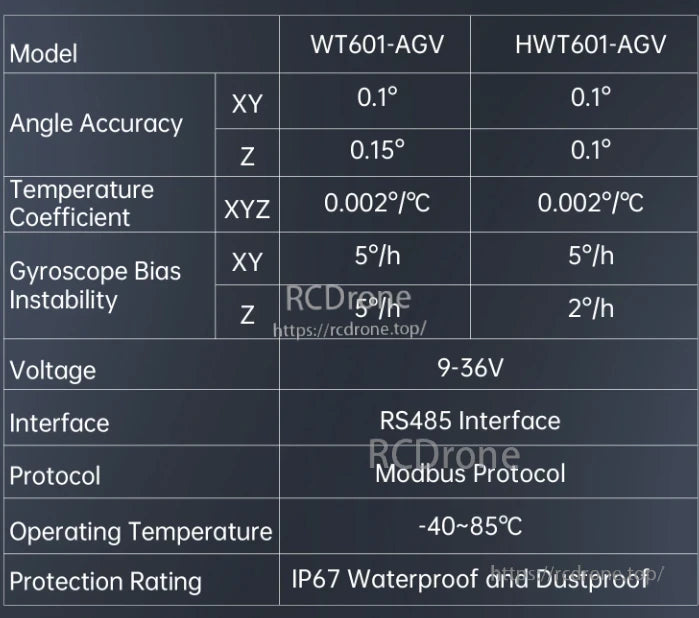
The HWT601-AGV IMU offers 0.1° angle accuracy in XY and Z axes with a 0.002°/°C temperature coefficient across XYZ. Gyroscope bias instability is 5°/h (XY) and 2°/h (Z). It operates on 9–36V, uses RS485 with Modbus, and functions from -40 to 85°C. IP67 rated, it provides waterproof and dustproof protection. The WT601-AGV variant has similar specs but 0.15° Z-axis accuracy and 5°/h Z-axis bias instability. Both models ensure reliable performance in demanding environments.
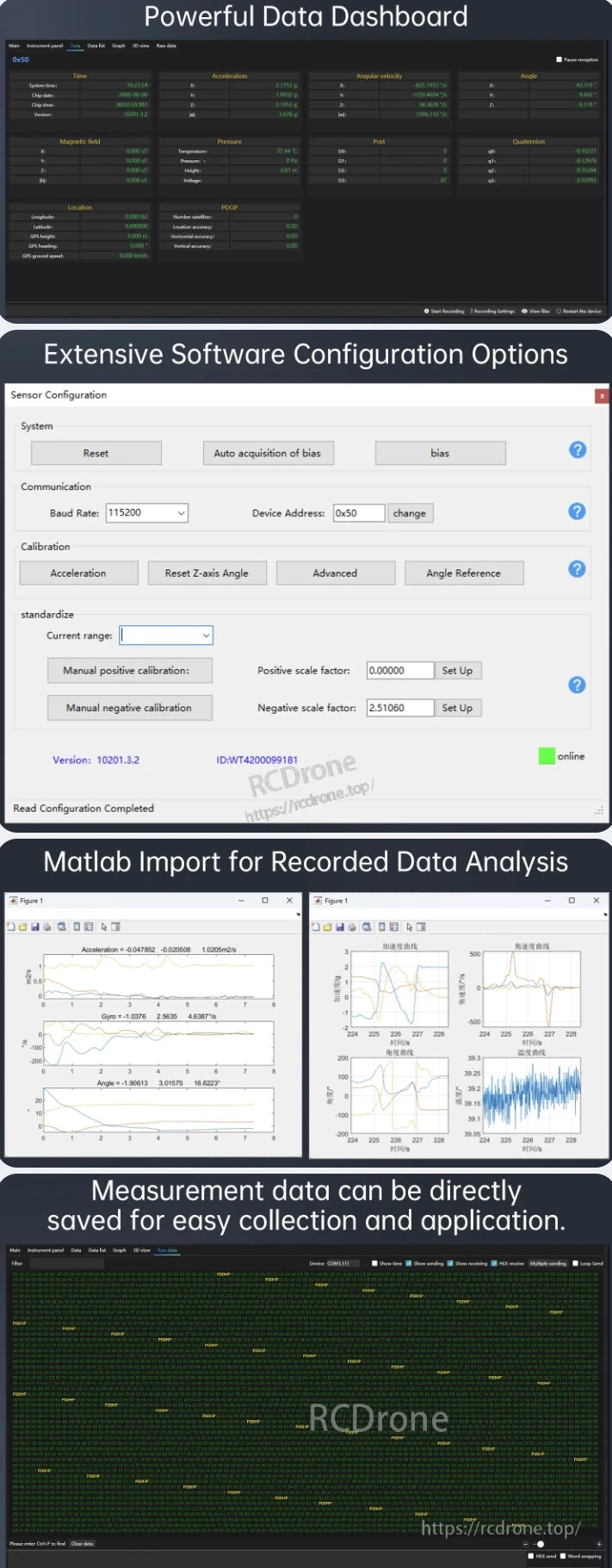
Powerful data dashboard with real-time sensor readings, extensive software configuration, MATLAB import for analysis, and direct data saving for easy collection and application.
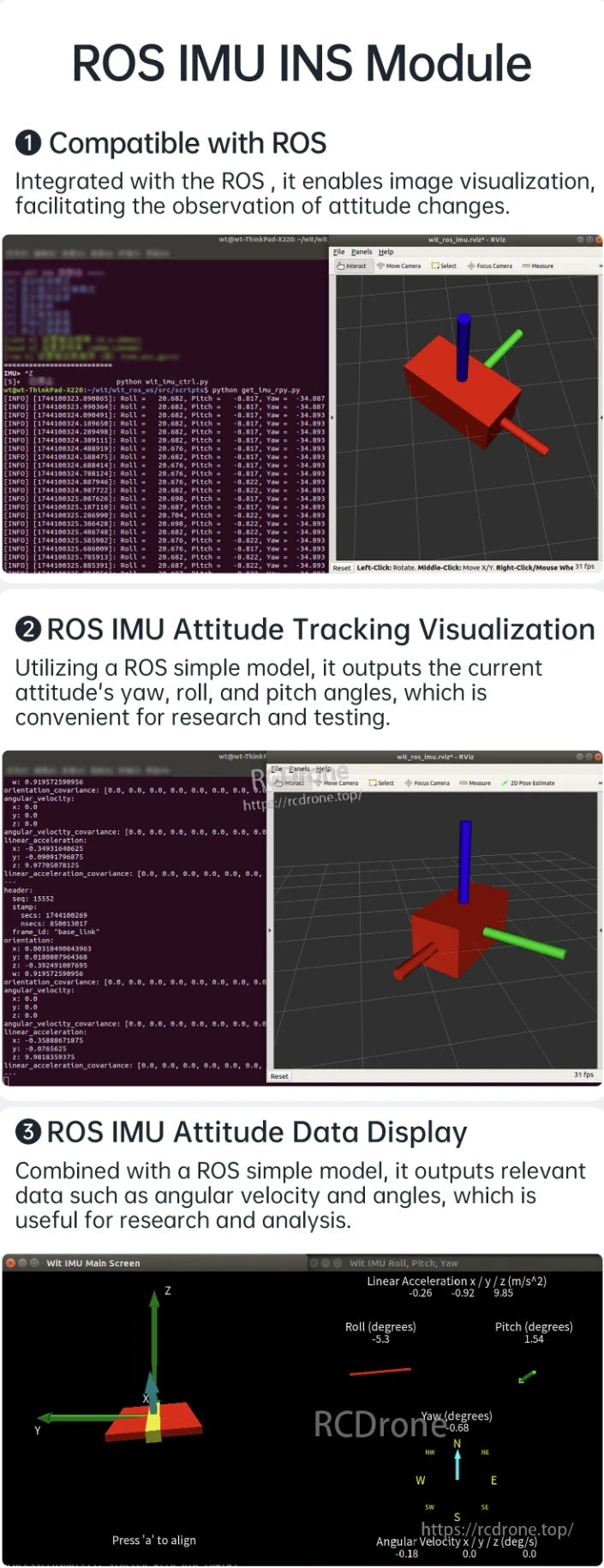
ROS IMU INS Module offers ROS compatibility, visualizes attitude tracking, and displays real-time roll, pitch, yaw, angular velocity, and linear acceleration for research and analysis.
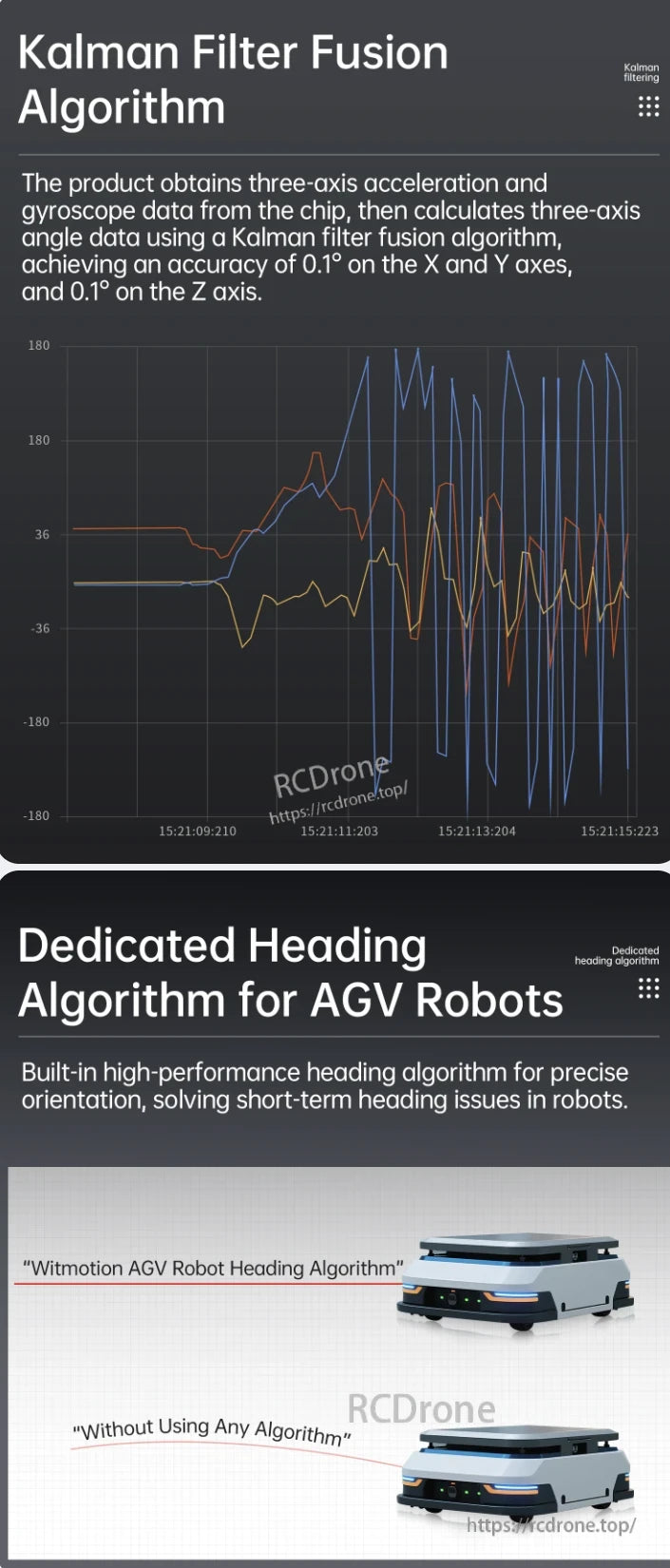
WitMotion HWT601 AGV IMU delivers precise 3-axis angle data with 0.1° accuracy using Kalman filter fusion. Its dedicated heading algorithm ensures stable robot orientation, significantly enhancing performance compared to systems without such algorithms.
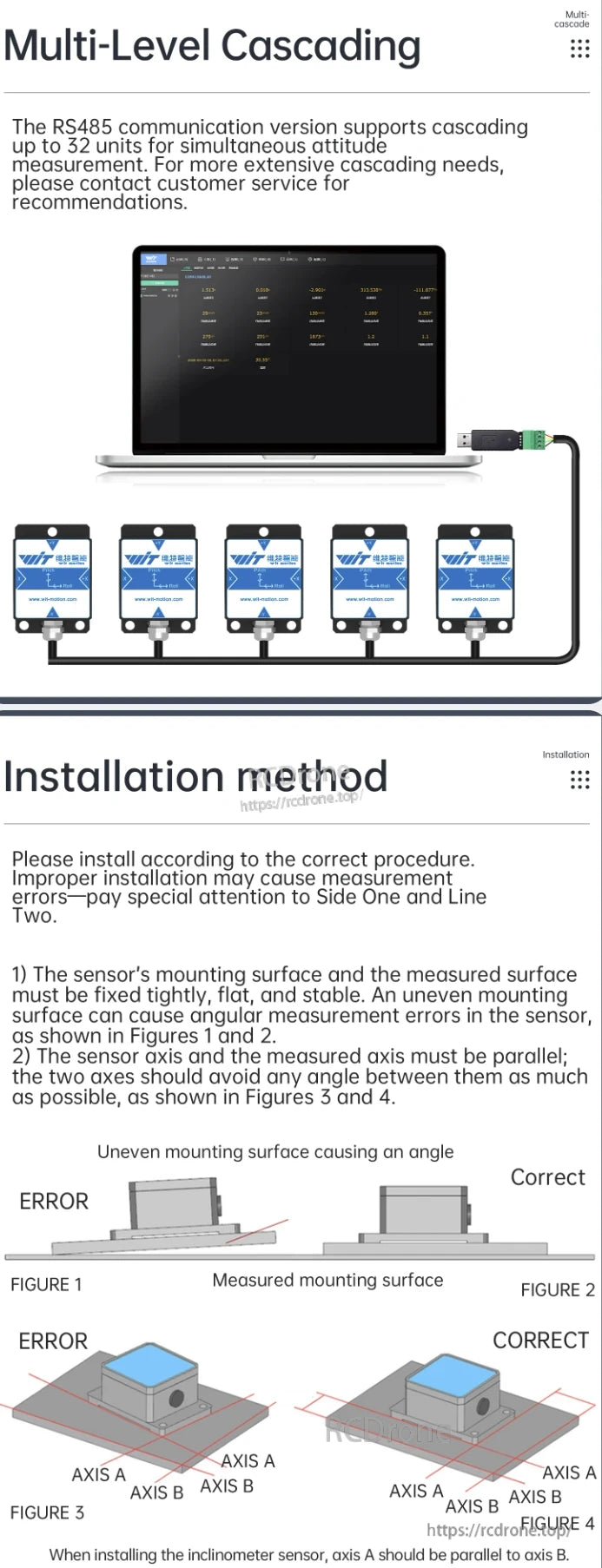
WitMotion HWT601 AGV IMU supports up to 32 cascading units via RS485 for attitude measurement. Ensure flat, stable mounting and aligned axes for accuracy.
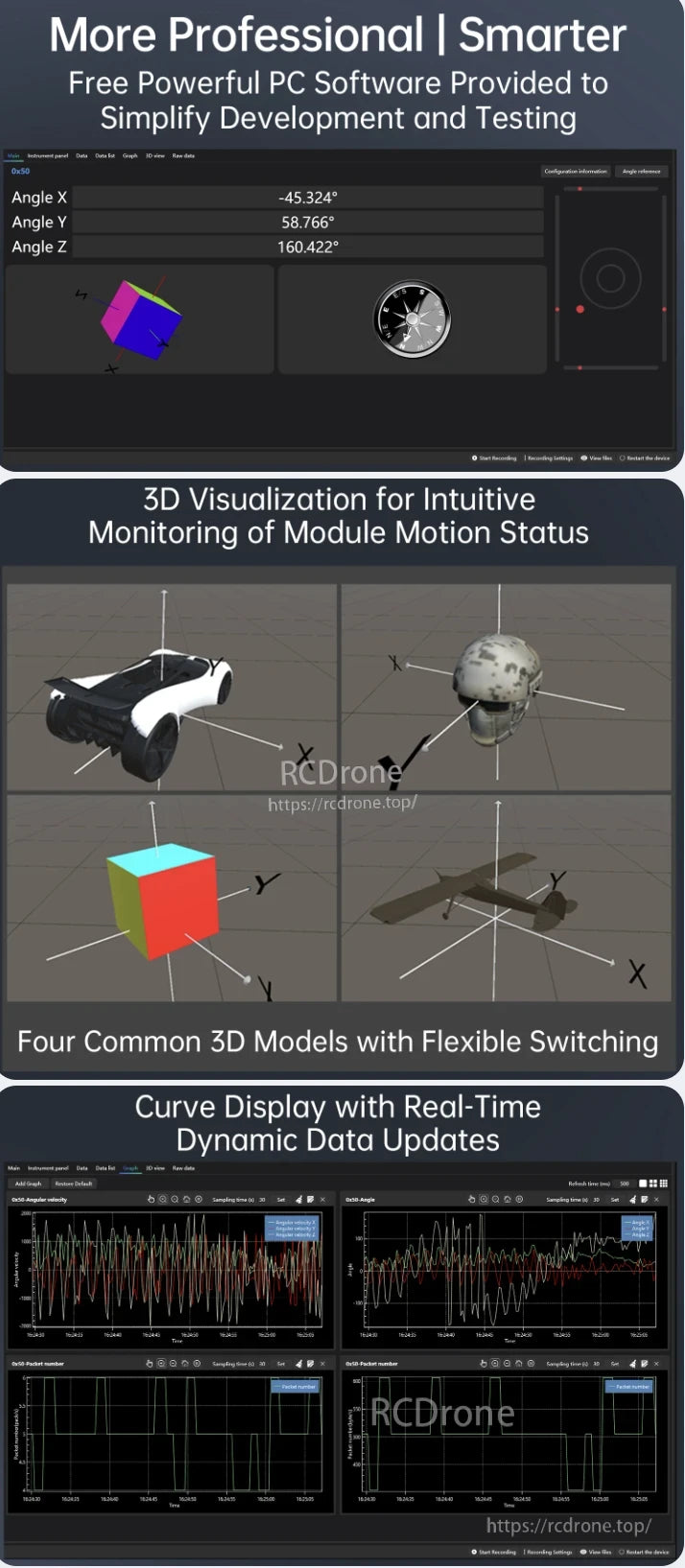
Professional PC software for WitMotion HWT601 AGV IMU offers real-time 3D visualization, angle monitoring, and dynamic curve display. Features include intuitive motion tracking, flexible model switching, and live data updates for efficient development and testing.
Supporting documentation includes example programs for STM32, Arduino, 51 UART, Windows C++, and Matlab to help developers apply the product using tutorials and code samples.
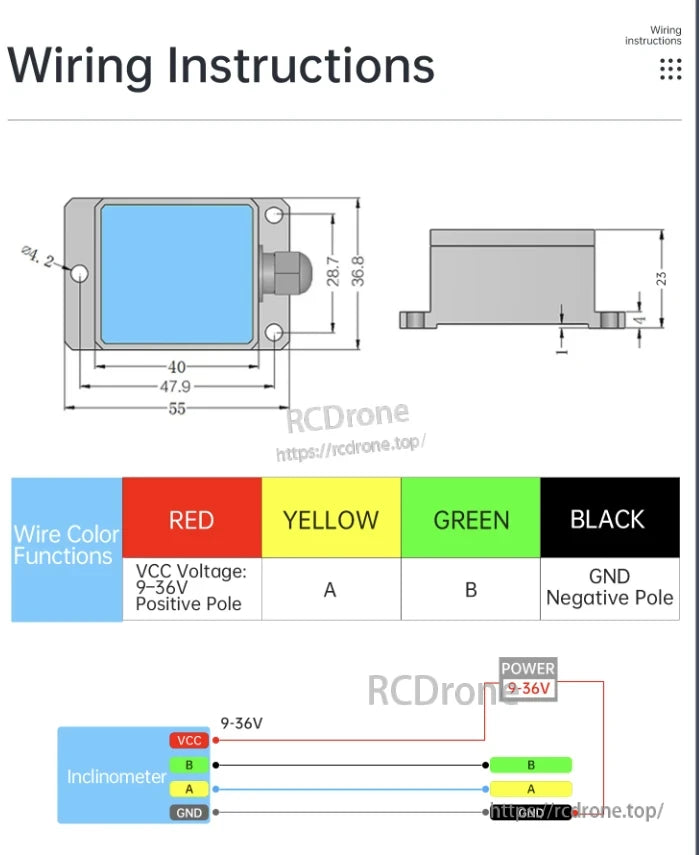
WitMotion HWT601 AGV IMU wiring guide: red (9-36V), yellow (A), green (B), black (GND). Dimensions and connection diagram provided.

WitMotion HWT601 AGV IMU for drones, autonomous driving, mobile robots, and unmanned logistics vehicles.
Related Collections








