WitMotion WT1-IMU Dual-Axis Angle Sensor (Accelerometer + Inclinometer), 3.3–5V TTL, 0.5° Accuracy, 20 Hz Output
WitMotion WT1-IMU Dual-Axis Angle Sensor (Accelerometer + Inclinometer), 3.3–5V TTL, 0.5° Accuracy, 20 Hz Output
WitMotion
Couldn't load pickup availability
Overview
WitMotion WT1-IMU is a super cost-effective dual-axis angle sensor that fuses accelerometer/gyroscope/magnetometer data with a Kalman-filter-based algorithm to output X/Y angle in real time. The module runs from 3.3–5 V, communicates over TTL serial, and is built on a compact gold-plated stamp-hole PCB for easy SMT integration. Typical angle accuracy is ±0.5° (X & Y) with a 20 Hz default return rate. Official PC software provides dashboards, calibration, logging, and export; SDK/examples support MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, and C/C#.
Key Features
-
Dual-axis angle output (X, Y) for attitude/tilt measurement
-
Kalman filter + WitMotion fusion algorithm for high stability
-
Supply: 3.3–5 V, TTL UART; LDO embedded
-
Accuracy: ±0.5° (X & Y)
-
Angle range: X ±180°, Y ±90°
-
Default return rate: 20 Hz (configurable in software)
-
Current consumption: typ. ~5 mA, <10 mA
-
Compact 15.24 × 15.24 mm module; gold-plated stamp holes
-
Free PC software: dashboard, calibration, bandwidth/baud settings, data recording & playback, export to TXT/BIN/PLAY/XLS
-
Accessories/fixtures: optional USB-to-TTL adapter and test-burning fixture for easy bring-up
Specifications
| Item | Value |
|---|---|
| Model | WT1-IMU |
| Voltage | 3.3–5 V |
| Interface | TTL UART |
| Output content | 2-axis angle (X, Y) |
| Angle range | X: ±180°;Y: ±90° |
| Angular accuracy | X/Y: ±0.5° |
| Default return rate | 20 Hz |
| Baud rate | 9600 (20 Hz output by default) |
| Current | typ. 5 mA; <10 mA |
Dimensions & Axes
| Size (mm) | Value |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (height) | 2 |
Axis definition: X to the right, Y upward, Z outward from the board; rotation follows the right-hand rule.
Pinout (12-pin stamp-hole)
| No. | Pin | Function |
|---|---|---|
| 1 | D0 | NC (reserved) |
| 2 | VCC | 3.3–5 V input |
| 3 | RX | Serial data input (TTL) |
| 4 | TX | Serial data output (TTL) |
| 5 | GND | Ground |
| 6 | SWIM | SWIM data interface |
| 7 | D3 | NC (reserved) |
| 8 | GND | Ground |
| 9 | SDA | NC (reserved) |
| 10 | SCL | NC (reserved) |
| 11 | VCC | 3.3–5 V input |
| 12 | D2 | NC (reserved) |
MCU connection: TTL serial; cross-connect TX↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC and GND common.
Software & Development
-
Dashboard: live view of angle, acceleration, angular velocity, magnetic field, quaternion, etc.
-
Config Menu: acceleration & magnetic calibration, placement direction, output frequency/bandwidth, baud-rate, sleep mode.
-
Recording/Export: quickly log and export to TXT/BIN/PLAY or paste into Excel (XLS).
-
Tooling: examples/SDKs for MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#.
-
Optional test-burning fixture for plug-and-play flashing/bring-up.
Typical Applications
Head-mounted display, movement tracking, robotics, AGV/UGV, unmanned driving, mining/tower/industrial attitude monitoring, automation equipment, manned aircraft R&D, safety monitoring, and smart/automated farms.
Details

Dual-axis angle sensor, cost-effective, stable, with Kalman filter algorithm, ISO9001 certified.
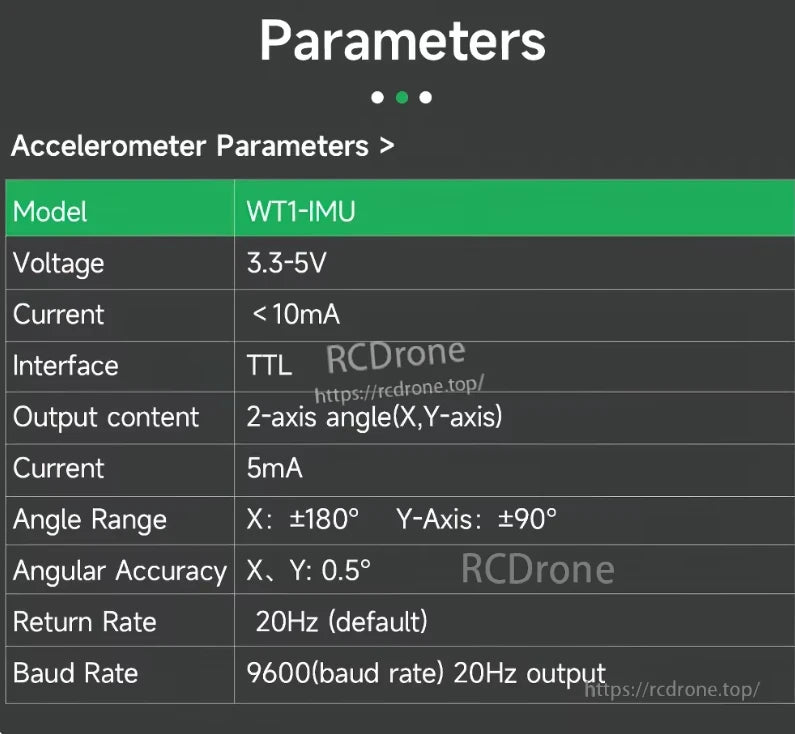
WT1-IMU accelerometer operates at 3.3-5V, <10mA current, TTL interface. Outputs 2-axis angles (X: ±180°, Y: ±90°) with 0.5° accuracy. Default return rate 20Hz, baud rate 9600.
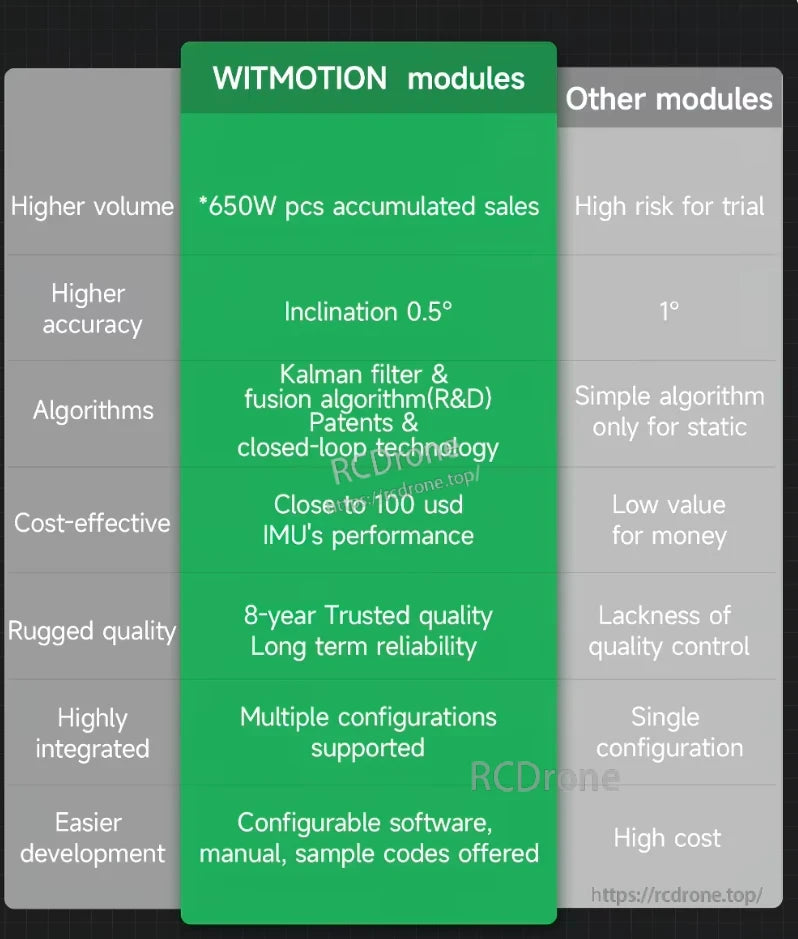
WitMotion modules provide high volume, accuracy, and cost-effectiveness with rugged design, multiple configurations, and easy development. They include 650W sales, 0.5° inclination, Kalman filter, closed-loop technology, and configurable software. Other modules offer lower performance, fewer features, and higher risk.
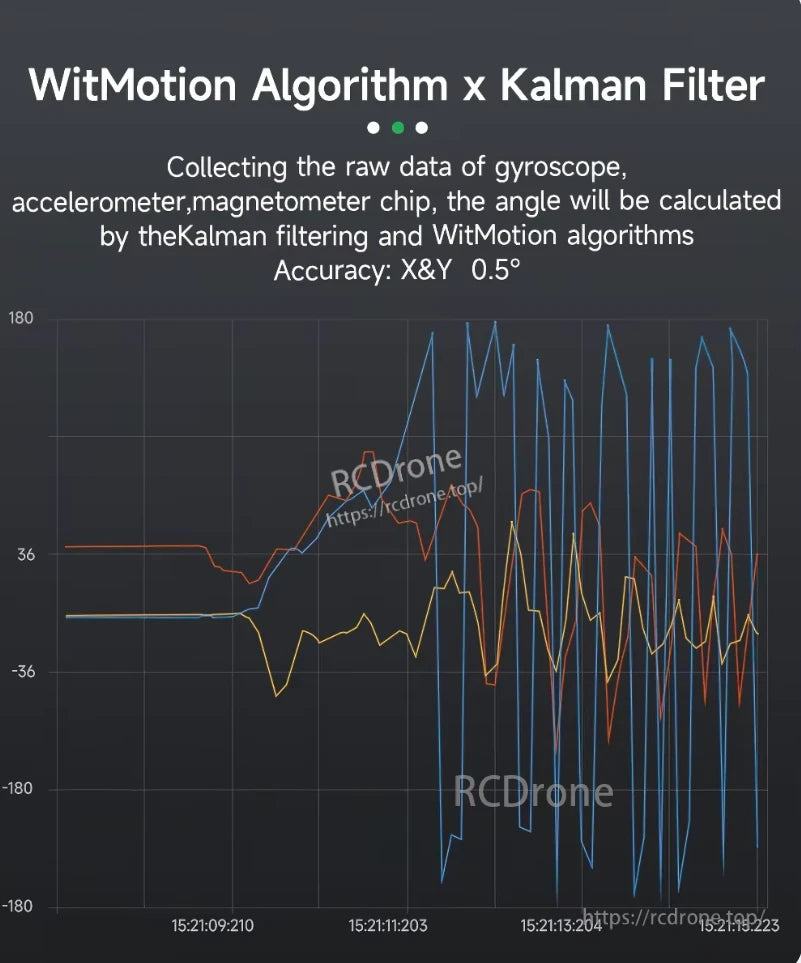
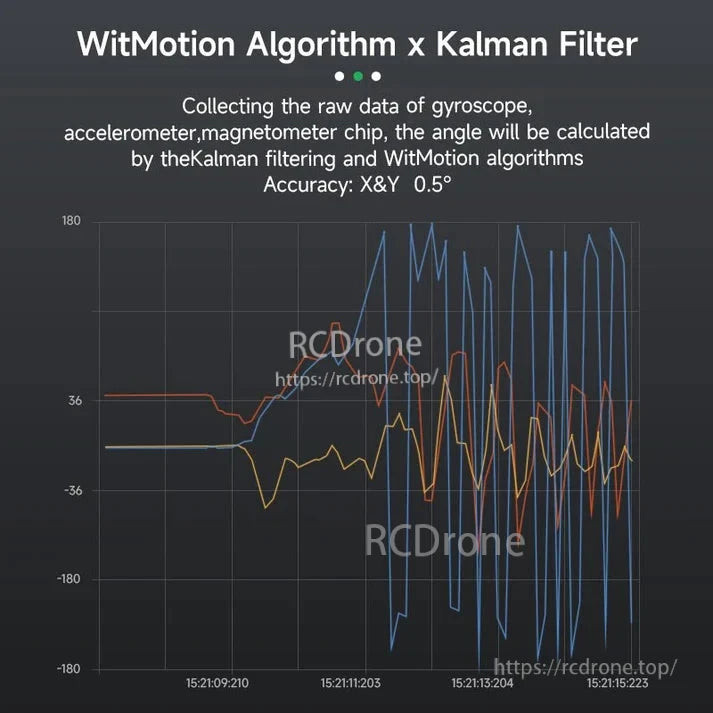
WitMotion Algorithm x Kalman Filter. Collects raw data from gyroscope, accelerometer, magnetometer. Calculates angle using Kalman filtering and WitMotion algorithms. Accuracy: X&Y 0.5°.
Interface: 3.3~5V, TTL, LDO embedded. Compact & easy to install with high-density 4-layer board and gold-plated stamp holes. Adaptive range switching for beginners. Development kits include software, manual, protocol, SDK, and sample codes.
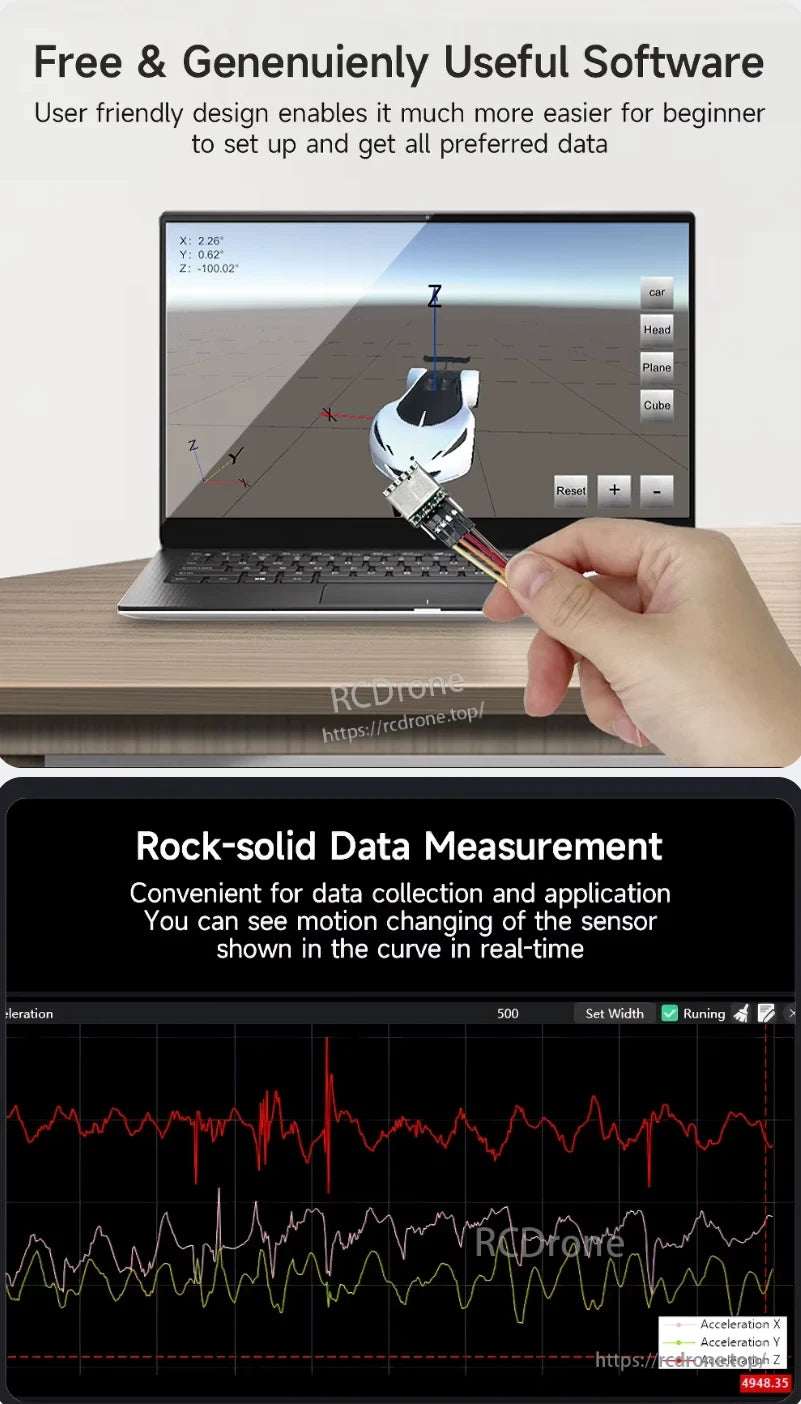
Free & genuinely useful software offers user-friendly design for easy setup and data retrieval. Real-time motion tracking with rock-solid data measurement displays acceleration changes in X, Y, Z axes via dynamic curves.
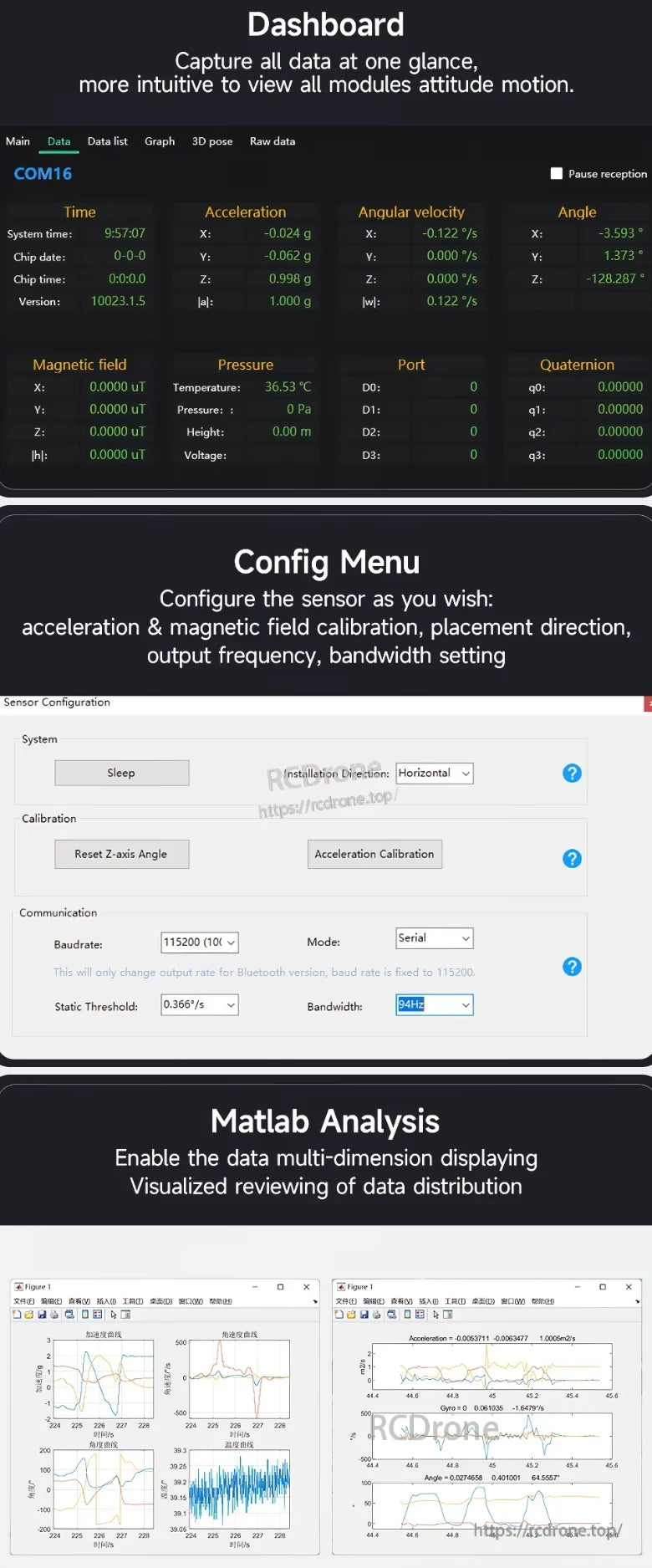
Dashboard displays real-time sensor data including acceleration, angular velocity, angle, magnetic field, pressure, and quaternion. Config menu allows calibration, installation direction, baud rate, and bandwidth settings. Matlab analysis enables multi-dimensional data visualization.
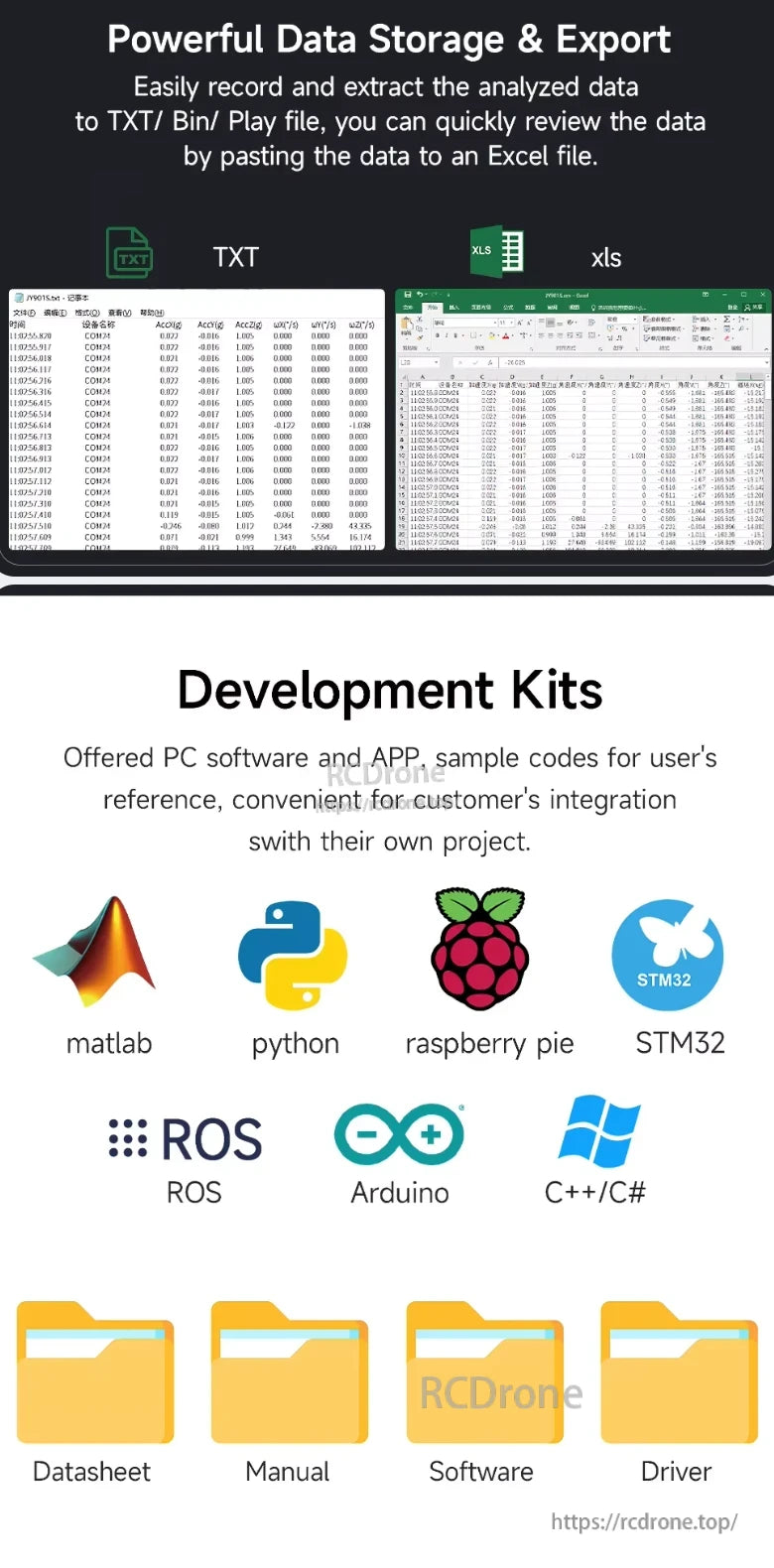
Powerful data storage and export to TXT, BIN, or Play files; compatible with MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#. Includes datasheet, manual, software, and driver for easy integration.
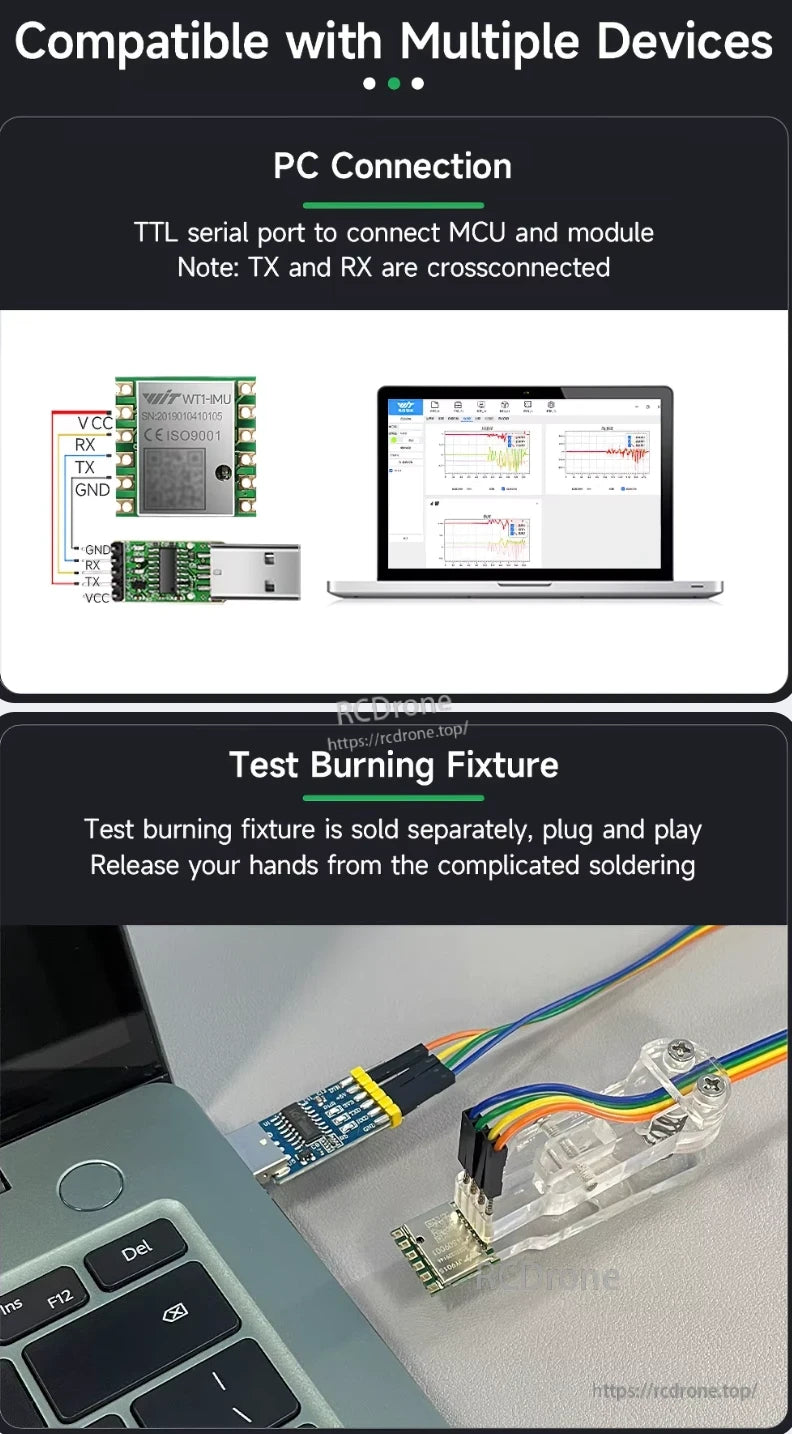
WitMotion WT1-IMU supports PC connection via TTL serial port with cross-connected TX and RX. Compatible with multiple devices. Test burning fixture sold separately, plug and play for easy setup without soldering.
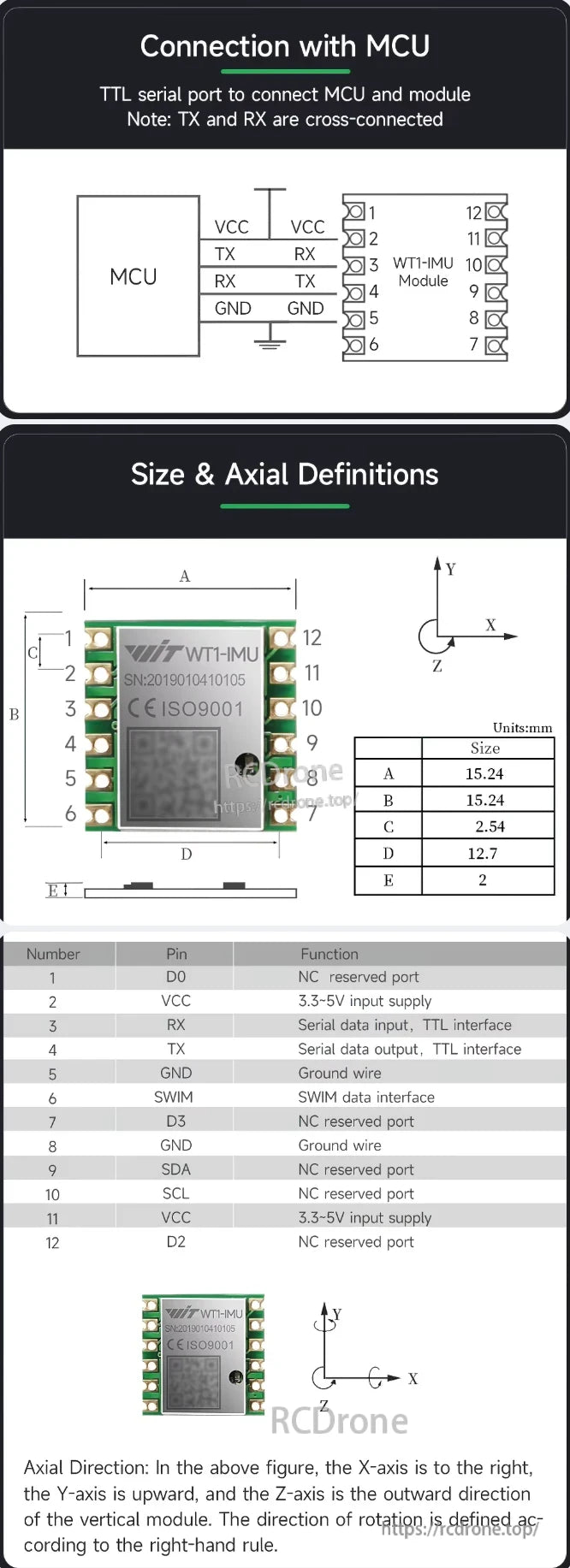
WitMotion WT1-IMU dual-axis angle sensor offers TTL serial connection, 12-pin layout, compact 15.24×15.24×2.54 mm size, right-hand rule axes, and includes VCC, GND, TX, RX, SWIM, SDA, SCL pins.

IMU sensor applications: mining, farming, robotics, towers, automation, drones, tracking, monitoring.
Related Collections