












WitMotion WT901C-485 9-Axis IMU Accelerometer Gyroscope Digital Compass (RS485/RS232/TTL), 0.05° Angle Accuracy, 0.2–200 Hz AHRS
WitMotion WT901C-485 9-Axis IMU Accelerometer Gyroscope Digital Compass (RS485/RS232/TTL), 0.05° Angle Accuracy, 0.2–200 Hz AHRS
RCDrone
Couldn't load pickup availability
Overview
The WitMotion WT901C-485 is a compact 9-axis AHRS IMU based on a triaxial MPU9250-class sensor suite (accelerometer + gyroscope + magnetometer) and WitMotion’s fusion/Kalman algorithm. It delivers angle, acceleration, angular velocity, magnetic field, and quaternion outputs with XY static accuracy 0.05° (dynamic 0.1°) and 0.2–200 Hz adjustable update rate. Multiple physical interfaces (RS485/RS232 Modbus & TTL UART) and wide input ranges make the WT901C-485 easy to integrate with Arduino/STM32/MCUs, PCs, and industrial controllers. Official Windows software (MiniIMU.exe) provides real-time graphs, 3D demo, data logging/export, and visual magnetic calibration.
Key features
-
9-axis outputs: angle (Roll/Pitch/Yaw), 3-axis acc/gyro/mag, quaternion.
-
High stability & accuracy: XY 0.05° static, 0.1° dynamic; acceleration stability 0.01 g.
-
Flexible I/O: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (default 9,600).
-
Adjustable rate: 0.2–200 Hz (default 10 Hz).
-
Wide supply: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA typical.
-
Tooling & SDKs: Windows app, Android app, CH340/CP2102 drivers, sample code for C/C++/STM32/Arduino/Matlab.
-
Magnetic calibration & 3D demo for first-time setup; live plots and TXT export.
-
Industrial design: –40~85 °C, 51×36×15 mm, vertical or horizontal mounting.
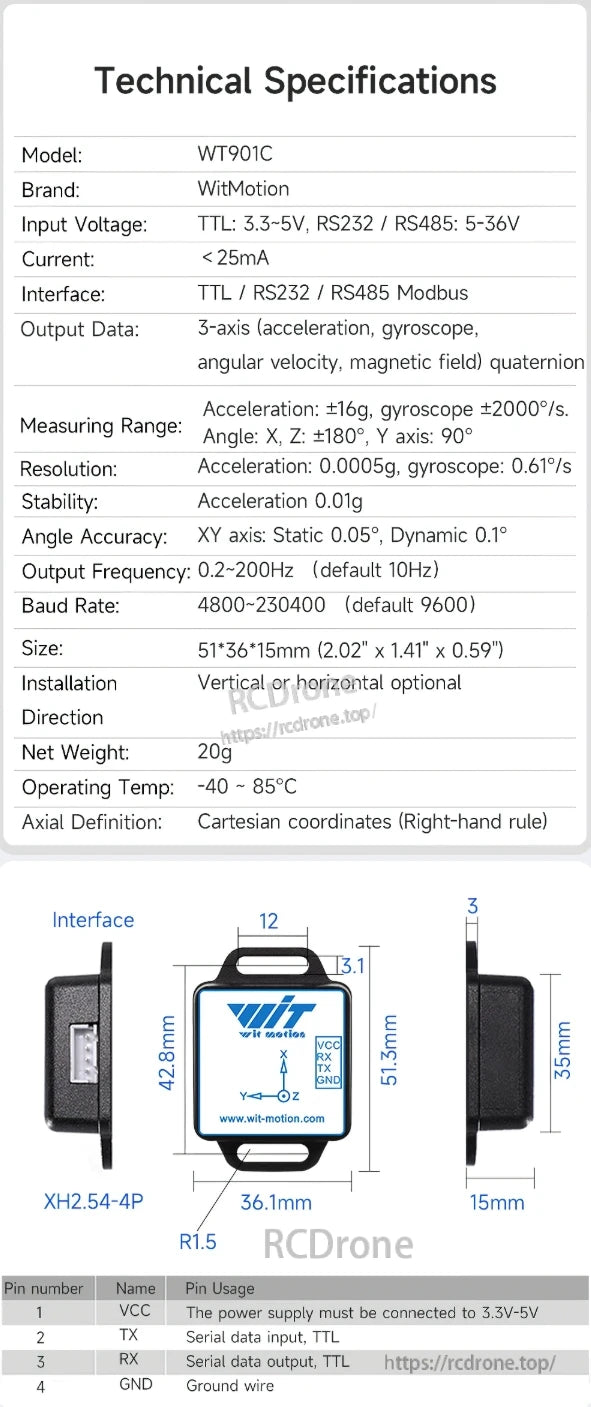
Technical specifications
| Item | Spec |
|---|---|
| Model | WT901C (WT901C-485 variant) |
| Interfaces | TTL / RS232 / RS485 (Modbus) |
| Input voltage | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Current | < 25 mA |
| Output data | Acceleration, angular velocity, magnetic field, angle, quaternion |
| Measuring ranges | Acc ±16 g, Gyro ±2000 °/s; Angle: X,Z ±180°, Y 90° |
| Resolution | Acc 0.0005 g, Gyro 0.61 °/s |
| Stability | Acceleration 0.01 g |
| Angle accuracy | XY static 0.05°, dynamic 0.1° |
| Output frequency | 0.2–200 Hz (default 10 Hz) |
| Baud rate | 4,800–230,400 (default 9,600) |
| Size / weight | 51×36×15 mm, 20 g |
| Operating temp | –40 ~ 85 °C |
| Axes | Cartesian, right-hand rule |
| Installation | Vertical or horizontal |
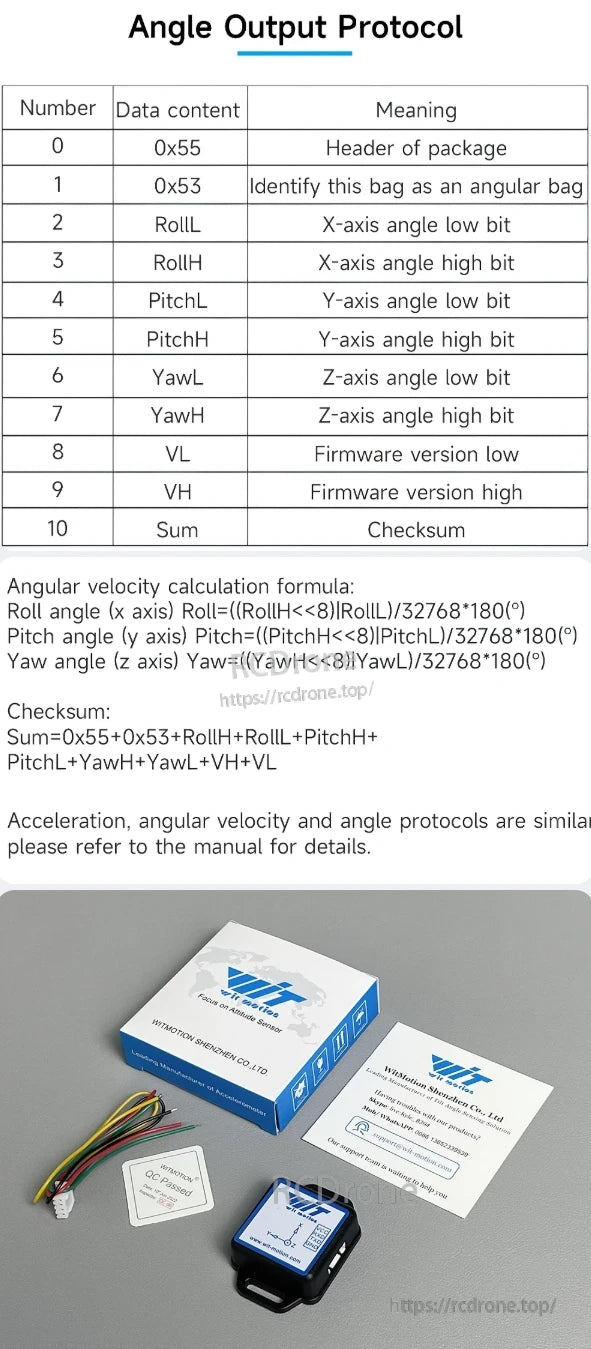
Angle frame (0x55 0x53) – output protocol
| Byte index | Content | Meaning |
|---|---|---|
| 0 | 0x55 | Packet header |
| 1 | 0x53 | “Angle” frame ID |
| 2–3 | RollL/RollH | X-axis angle (low/high) |
| 4–5 | PitchL/PitchH | Y-axis angle (low/high) |
| 6–7 | YawL/YawH | Z-axis angle (low/high) |
| 8 | VL | Firmware version low |
| 9 | VH | Firmware version high |
| 10 | Sum | Checksum |
Angle decoding
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Sum = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Acceleration and angular-velocity frames follow the same layout style—see manual.)
Dimensions & Connector
Enclosure size: 51 × 36 × 15 mm (H × W × D), with mounting ears; weight ≈ 20 g.
Connector: XH2.54-4P (board header on the sensor).
Pinout (TTL version)
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power input 3.3–5 V |
| 2 | TX | Serial data input, TTL level |
| 3 | RX | Serial data output, TTL level |
| 4 | GND | Ground |
Notes: Use TTL levels for direct MCU integration. RS232/RS485 variants use their respective voltage levels and wiring standards.
Software & tools
-
MiniIMU.exe (Windows): configuration (algorithm, install direction, ranges, bandwidth), real-time graphs, raw/hex view, data recording and TXT export.
-
3D demo: visualize orientation in real time (source available).
-
Visual magnetic calibration: ellipse-fit wizard to remove bias (recommended for first use).
-
Drivers & code: CH340/CP2102 drivers; examples for STM32, Arduino, C/C++, Matlab; Android app; PC/phone demo videos.
Typical applications
Automation and robotics, leveling platforms, tilt-angle monitoring, vibration monitoring, consumer electronics, IoT system integration, industrial testing, VR/AR headsets.
Details

Cost-effective AHRS IMU with 0.05° accuracy in X Y axes. Features inclination, vibration, attitude sensing using WitMotion Fusion Algorithm. Includes acceleration, gyroscope, angle, magnetic, Kalman filtering, and quaternion functions.
WitMotion WT901C IMU sensor offers 3-axis acceleration, gyroscope, angular velocity, and magnetic field sensing. It supports TTL/RS232/RS485 interfaces, has a ±16g acceleration range, ±2000°/s gyro, 0.05° static angle accuracy, and operates between -40°C and 85°C.

WitMotion WT901C IMU Sensor offers automation, VR headsets, leveling, and vibration monitoring. Applications include consumer electronics, IoT integration, industrial testing, and AR/VR. Free software provides user-friendly attitude measurement with real-time angle data.
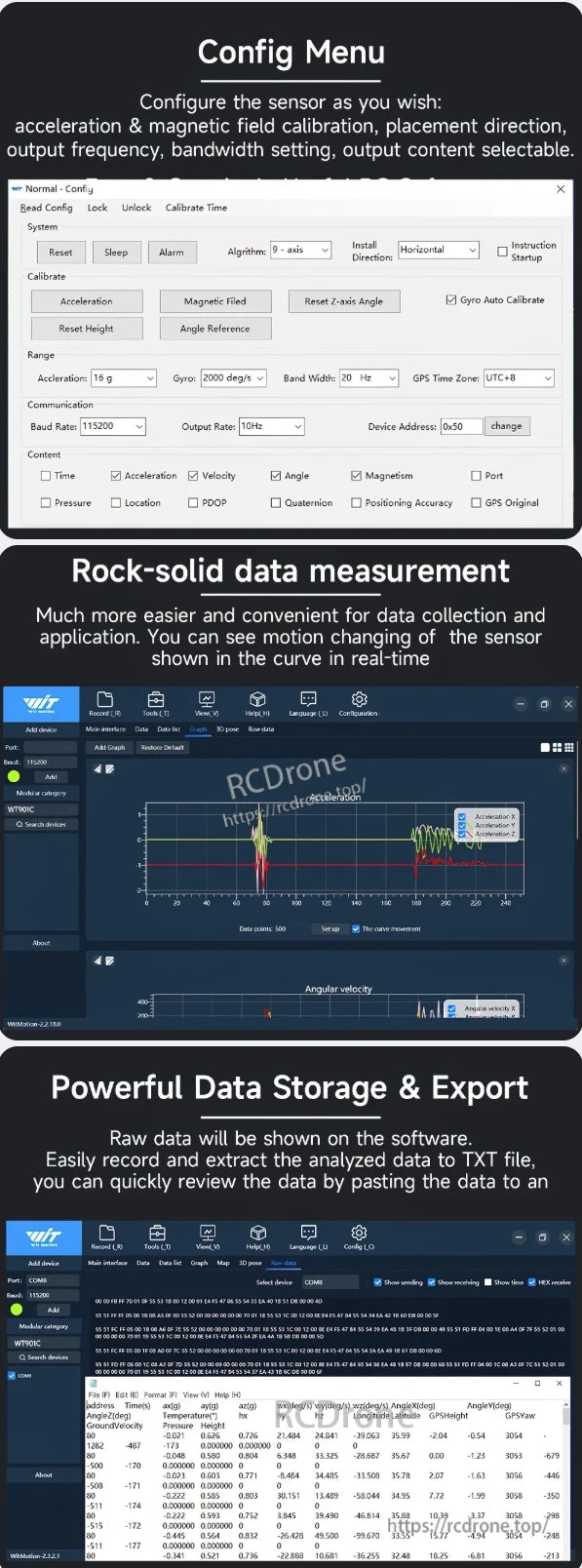
WitMotion WT901C IMU sensor offers configurable settings for acceleration, magnetic field, and orientation. It provides real-time data visualization, robust measurement, and supports data storage/export in TXT format for analysis.
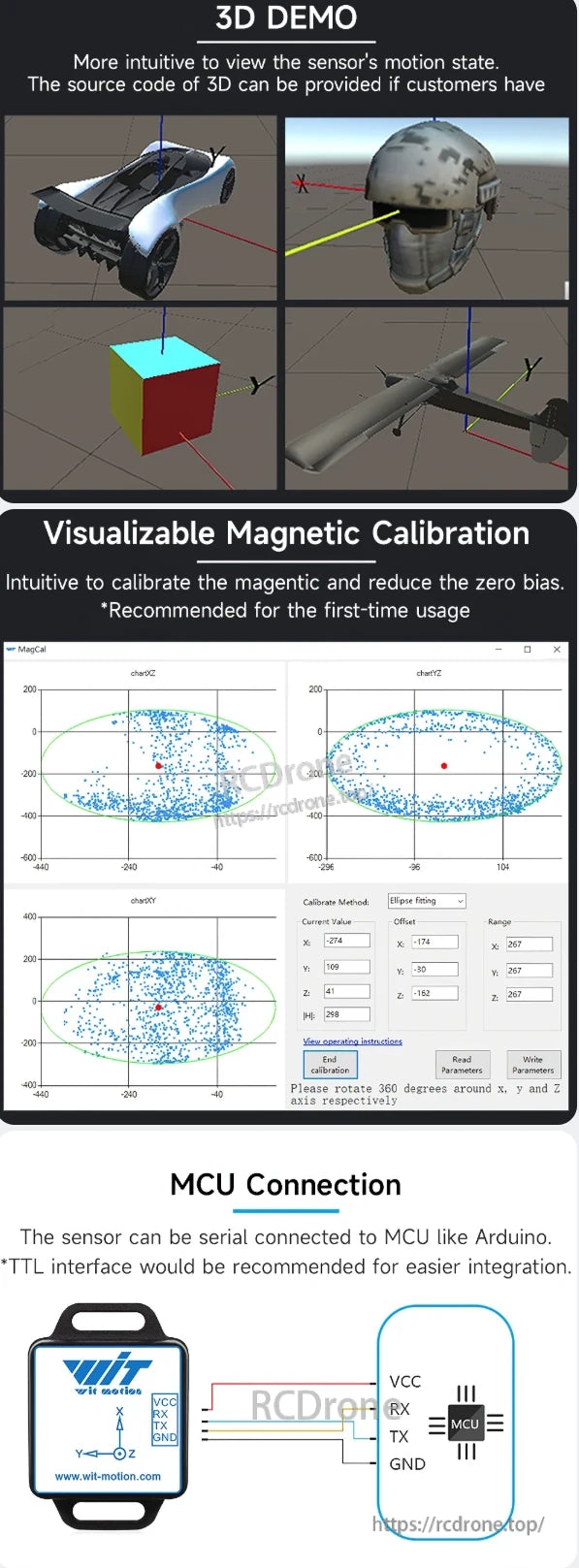
3D demo visualizes sensor motion with car, helmet, cube, and drone models. Magnetic calibration interface allows intuitive adjustment. MCU connection details feature TTL interface for Arduino, with labeled VCC, RX, TX, GND pins.

Development Kits include free Windows software, drivers, manuals, and sample codes for STM32, Arduino, C++, MATLAB. Features PDFs, demo videos, and Android app support for WT901C IMU Sensor.
IMU sensor WT901C angle output protocol details: data structure, angular calculations, checksum formula, packaging. Features roll, pitch, yaw angles, firmware version, and checksum.
Related Collections












