









WitMotion WT901C 9-Axis AHRS IMU — Accelerometer Gyroscope Magnetometer with Angle & Quaternion, 0.05° Accuracy, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Axis AHRS IMU — Accelerometer Gyroscope Magnetometer with Angle & Quaternion, 0.05° Accuracy, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Couldn't load pickup availability
Overview
The WitMotion WT901C is a compact 9-axis AHRS IMU that fuses a 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer with WitMotion’s fusion/Kalman filtering to output angles (roll/pitch/yaw), angular velocity, acceleration, magnetic field, and quaternion. It delivers 0.05° static XY accuracy (0.1° dynamic), supports 0.2–200 Hz update rates, and communicates over TTL, RS232, or RS485 (Modbus)—ideal for inclination, vibration, and attitude measurement in automation, leveling platforms, VR/AR, and industrial testing.
Key features
-
High accuracy AHRS: XY static 0.05°, dynamic 0.1°; right-hand Cartesian axes.
-
Wide I/O & voltage: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (default 9 600).
-
Configurable output: 0.2–200 Hz (default 10 Hz); user-selectable contents.
-
Full 9-axis data: Acceleration, angular velocity, magnetic field, angle & quaternion.
-
Visualization tools: Windows MiniIMU software with real-time graphs, raw-data logging/export (TXT), 3D motion demo, and visual magnetic calibration.
-
Developer resources: Drivers (CH340/CP2102), manuals/datasheet, sample code for 51/C++/STM32/Arduino/Matlab, and Android app.
-
Flexible install: Vertical or horizontal mounting; compact 51 × 36 × 15 mm, ~20 g.
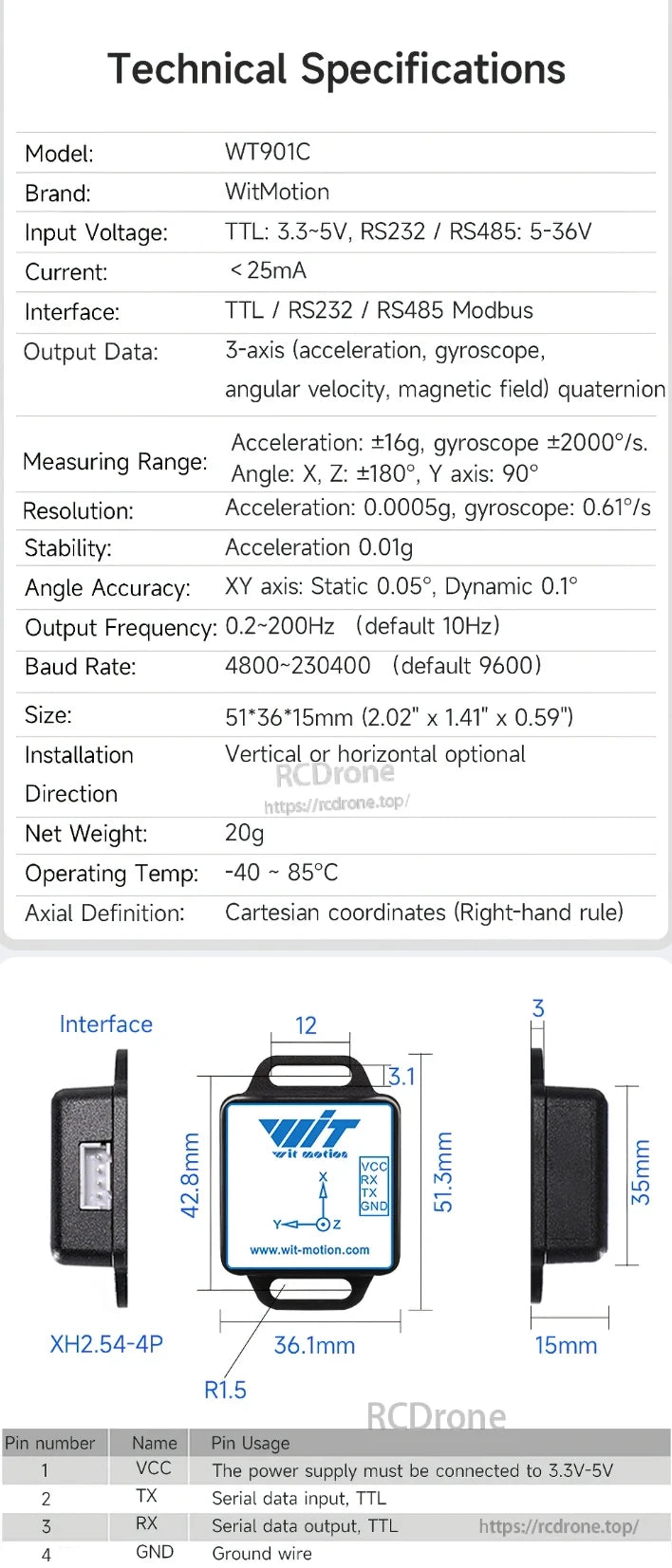
Technical specifications
-
Model/Brand: WT901C / WitMotion
-
Interfaces: TTL / RS232 / RS485 (Modbus)
-
Input voltage: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Current: < 25 mA
-
Output data: 3-axis acceleration, gyroscope (angular velocity), magnetic field, angle, quaternion
-
Measuring range: Acc ±16 g; Gyro ±2000 °/s; Angle X,Z ±180°, Y 90°
-
Resolution: Acc 0.0005 g; Gyro 0.61 °/s
-
Stability: Acc 0.01 g
-
Angle accuracy: XY static 0.05°, dynamic 0.1°
-
Output frequency: 0.2–200 Hz (default 10 Hz)
-
Baud rate: 4 800–230 400 (default 9 600)
-
Size / Weight: 51 × 36 × 15 mm / ≈ 20 g
-
Operating temp: −40 ~ 85 °C
-
Axis definition: Cartesian coordinates, right-hand rule
Dimensions & connector (TTL version)
-
Body: 51.3 mm (H) × 36.1 mm (W) × 15 mm (D); mounting ears radius R1.5
-
Connector: XH2.54-4P
-
Pinout (left→right on label VCC/RX/TX/GND):
-
VCC — power 3.3–5 V
-
TX — Serial data input, TTL
-
RX — Serial data output, TTL
-
GND — ground
-
Note: Axis graphic is printed on the housing (X↑, Y→, Z•), aiding alignment.
Angle output protocol (frame 0x55 0x53)
| Byte | Content | Meaning |
|---|---|---|
| 0 | 0x55 | Header |
| 1 | 0x53 | Angle frame ID |
| 2–3 | RollL/RollH | X-axis angle |
| 4–5 | PitchL/PitchH | Y-axis angle |
| 6–7 | YawL/YawH | Z-axis angle |
| 8–9 | VL/VH | Firmware version (low/high) |
| 10 | Sum | Checksum |
Angle conversion:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Acceleration and angular-velocity frames are similar; see manual.)
Software & tooling
-
Windows (MiniIMU.exe): device config (ranges, bandwidth, output rate), real-time graphs, raw-data view, 3D pose visualization, export to TXT.
-
Mag calibration: visual ellipse-fit workflow to reduce bias (rotate around X/Y/Z).
-
MCU integration: direct serial connection; TTL recommended for simple MCU hookup (Arduino/STM32, etc.).
-
Resources included: Datasheet.pdf, Manual.pdf, CH340 & CP2102 drivers, example code, Android App, demo videos.
Typical applications
Automation | Tilt/level monitoring | Vibration monitoring | Leveling platforms | IoT system integration | Industrial testing | VR/AR headsets | Consumer electronics.
Details

Cost-effective AHRS IMU with 0.05° accuracy in X and Y axes. Features inclination, vibration, and attitude sensing using WitMotion Fusion Algorithm. Includes acceleration, gyroscope, angle, magnetic, Kalman filtering, and quaternion functions.
WitMotion WT901C IMU offers 3-axis sensing with acceleration, gyroscope, and magnetometer. Provides quaternion output. Supports TTL, RS232, RS485. Measures ±16g, ±2000°/s, ±180° angles. Compact 51×36×15mm size. Operates from -40 to 85°C.

WitMotion WT901C IMU supports automation, VR headsets, leveling, and vibration monitoring. It works for consumer electronics, IoT, industrial testing, and AR/VR. Comes with free software for real-time angle data display.

WitMotion WT901C IMU config menu allows sensor calibration, data output settings, and real-time motion visualization. It supports 9-axis algorithm, adjustable acceleration, gyro, bandwidth, GPS time zone. Real-time graphs show acceleration and angular velocity for precise measurement.
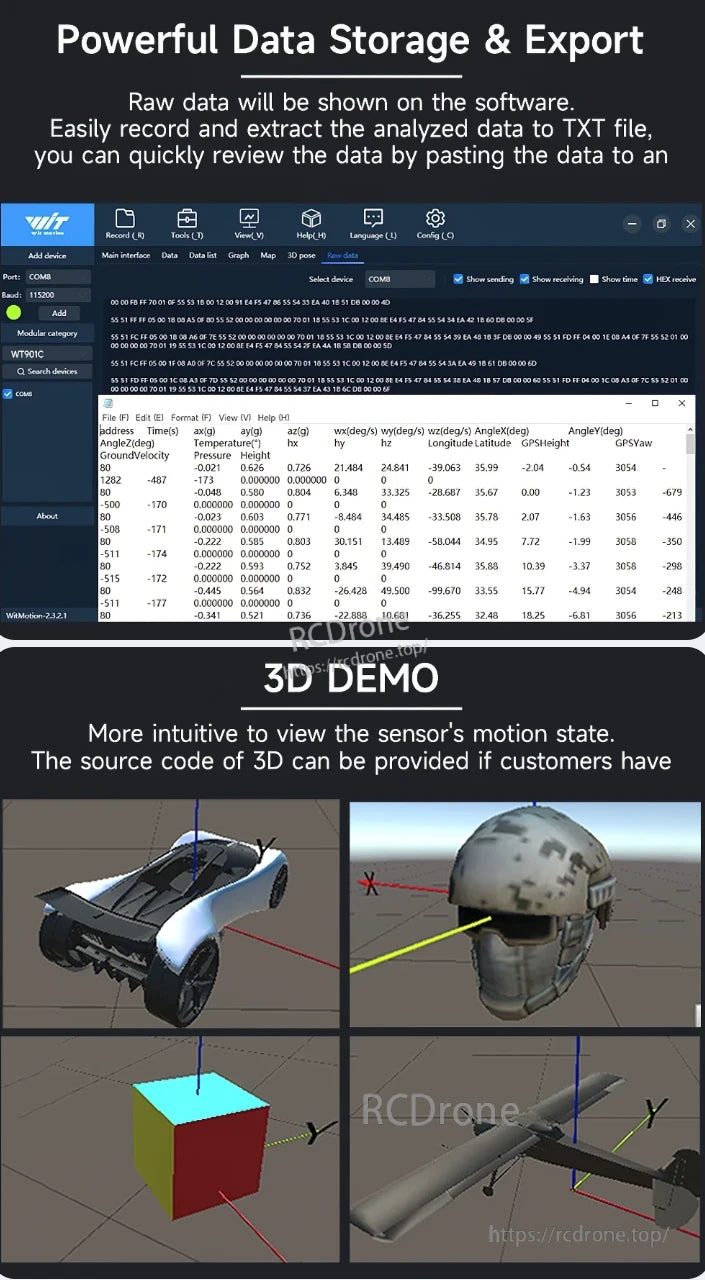
WitMotion WT901C IMU offers powerful data storage, easy TXT export, and 3D motion visualization with available source code.
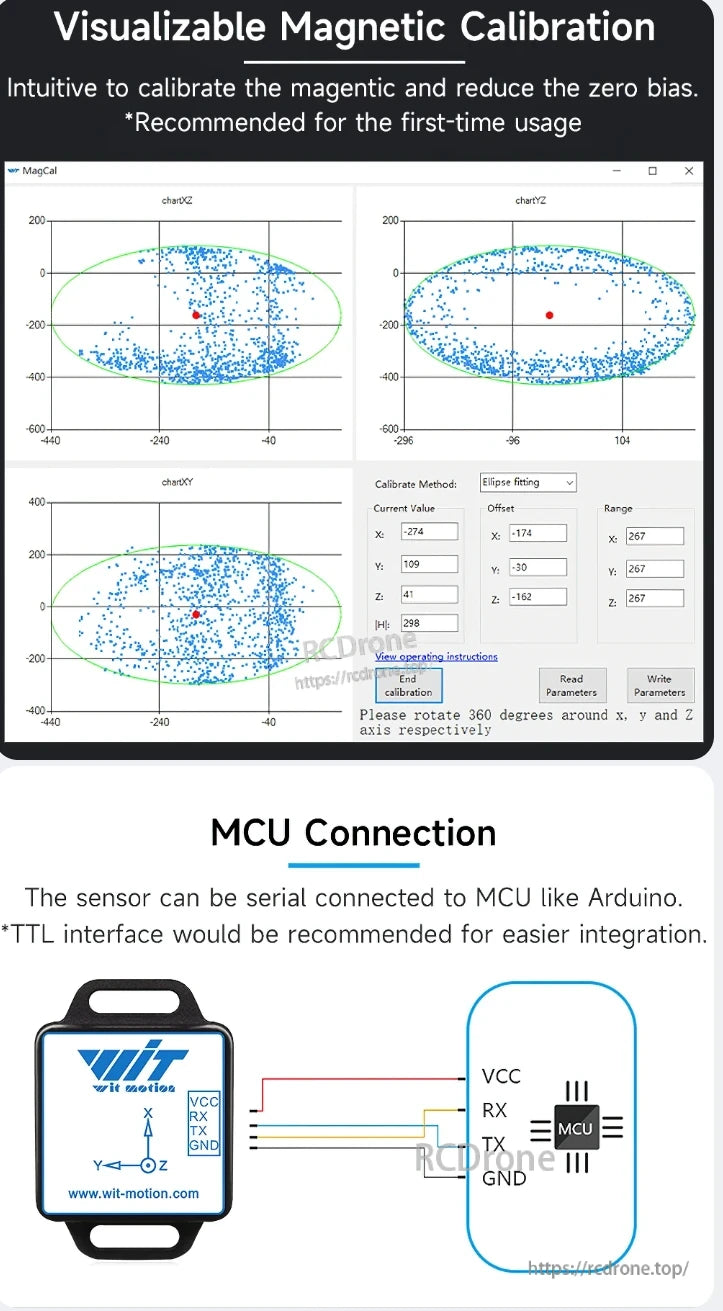
Visualizable magnetic calibration for WT901C IMU with ellipse fitting method. MCU connection via TTL interface recommended. Sensor connects to Arduino-like MCUs using VCC, RX, TX, GND pins.
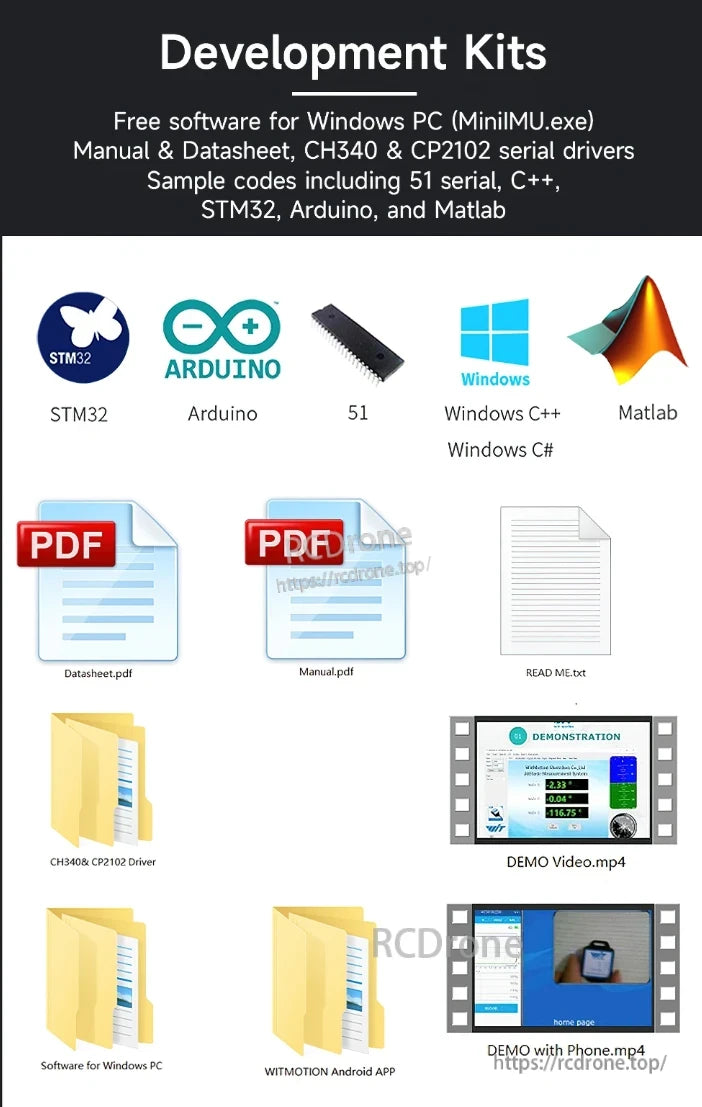
Development Kits include free software for Windows, manual, datasheet, CH340 & CP2102 drivers, sample codes for 51, C++, STM32, Arduino, and Matlab, along with demo videos and Android app.
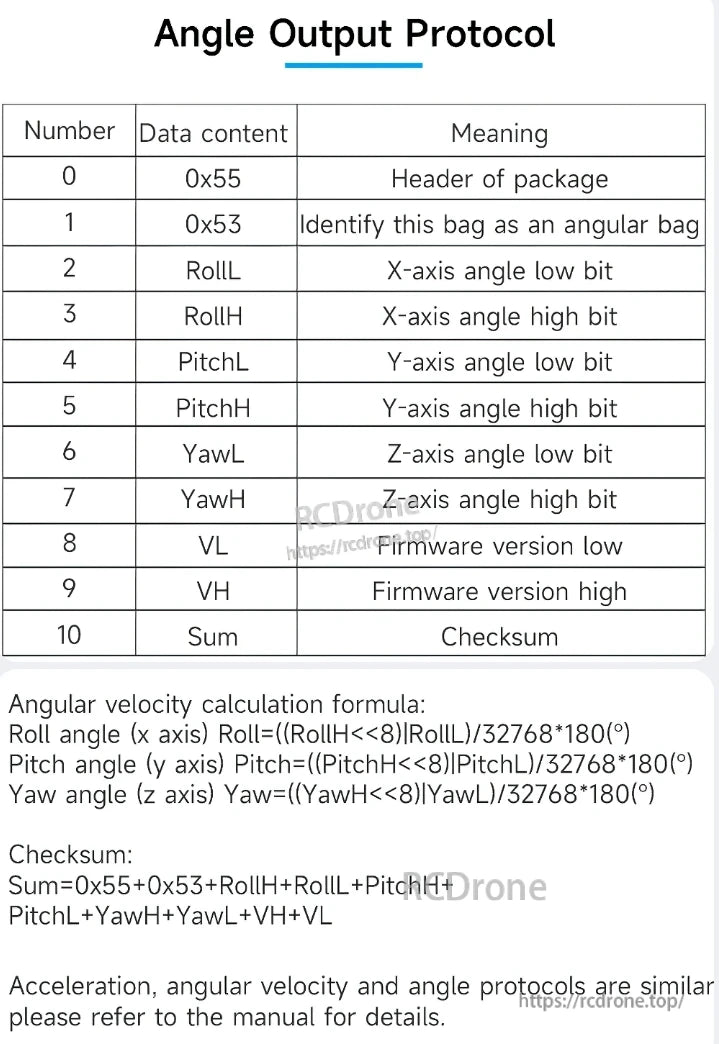
Data structure for WT901C IMU angle output includes header, roll, pitch, yaw, firmware version, and checksum. Formulas for calculations and verification are provided. Similar structures exist for acceleration and angular velocity.
Related Collections









