






WitMotion WTGAHRS1/2 10-Axis GPS-IMU Accelerometer Gyroscope Magnetometer Barometer AHRS, 0.2–200 Hz, UART/I²C, BDS+GPS Navigation
WitMotion WTGAHRS1/2 10-Axis GPS-IMU Accelerometer Gyroscope Magnetometer Barometer AHRS, 0.2–200 Hz, UART/I²C, BDS+GPS Navigation
WitMotion
Couldn't load pickup availability
Overview
WTGAHRS1/2 are GNSS-aided AHRS/IMU modules that fuse a 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer, 3-axis Euler angle and a barometer with BDS/GPS positioning. They deliver stable attitude, heading, longitude/latitude, altitude and ground-speed at 0.2–200 Hz using Kalman filtering. Core accuracy is X/Y 0.2° and Z 1° (post-calibration, away from magnetic interference). They provide UART-TTL and I²C (400 kHz) outputs, free Windows upper-computer software, and rich examples for STM32/Arduino/Windows/Matlab—ideal for UAVs, UGVs, robotics and vehicle navigation.
Model selection
| Model | Antenna | Supply | Current | Output rate | Angle accuracy |
|---|---|---|---|---|---|
| WTGAHRS1 | External GNSS (BDS+GPS) | 3.3–5 V | < 50 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
| WTGAHRS2 | Internal GNSS (BDS+GPS) | 3.3–5 V | < 40 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
IMU & mechanical specifications (WTGAHRS1/2)
-
Size: 72.5 mm × 38 mm × 27 mm
-
Sensors: 3-axis Acc; 3-axis Gyro; 3-axis Mag; 3-axis Angle; Barometer
-
Ranges: Acc ±16 g; Gyro ±2000 °/s; Angle ±180°
-
Barometer accuracy: 1 Pa
-
Typical measurement error: 1°
-
Interfaces: UART-TTL (baud 4,800–921,600), I²C (supports 400 kHz)
-
Output contents: time, acceleration, angular velocity, Euler angle, magnetic field, pressure, altitude, longitude, latitude, ground speed
-
Weight: WTGAHRS1 70.6 g; WTGAHRS2 62.4 g
GNSS specifications
-
Systems/Bands: BDS/GPS/GLONASS/GALILEO/QZSS/SBAS; C/A code 1.023 MHz
-
RF: three receiving channels; S11/S22 SWR ≤ 1.3; 50 Ω ± 5%
-
Horizontal accuracy: < 2.5 m (autonomous), < 2 m (SBAS) [CEP50%, 24 h static, −130 dBm, ~6 usable sats]
-
Speed accuracy: < 0.1 m/s; Course accuracy: < 0.5°; Timing: 30 ns; Reference: WGS-84
-
Dynamics: altitude 50,000 m; velocity 50,000 m/s; acceleration ≤ 4 g
-
Sensitivity: tracking −162 dBm; acquisition −148 dBm
-
Start times: cold 35 s; warm 32 s; hot 1 s
-
1PPS: 0.25 Hz–1 kHz; Position update: 1–10 Hz (default 1 Hz)
-
Interface: UART/TTL
Software and development
-
Windows upper-computer software: data logging, 3D model, curve plotting, dashboard, module configuration
-
Example code/resources: STM32 UART demo, Arduino library, 8051 demo, Windows C/C# and Matlab examples, Android APP
-
Quick test wiring (USB-TTL): GND–GND, VCC–5 V, TX–RX, RX–TX
Typical applications
UAV/UGV AHRS, robotics and AGV/AMR navigation, vehicle positioning and speed/attitude measurement, antenna/solar trackers, platform stabilization, education and algorithm research.
What’s included
-
WTGAHRS1 or WTGAHRS2 sensor (per selection)
-
GNSS antenna (WTGAHRS1 external-antenna version)
-
User guide and download links for PC software and examples
Buyer notes
-
Z-axis/heading accuracy depends on calibration and magnetic environment.
-
Choose WTGAHRS1 when you need an external GNSS antenna; choose WTGAHRS2 for a compact build with an internal antenna.
Details

WitMotion WTGAHRS1 AHRS+GPS module includes 3-axis accelerometer, gyroscope, magnetometer, barometer, and GPS. Provides high-precision attitude, heading, and position data for robotics and navigation.

WitMotion WTGAHRS1, 10-axis AHRS module with ICM-42605 and AK8963 chips. Features 3-axis accelerometer, gyroscope, magnetometer, GPS, and TTL interface. Supports 3.3-5V, <50mA current, 4800-921600 baud rate, and ±250-2000 deg/s gyro range.
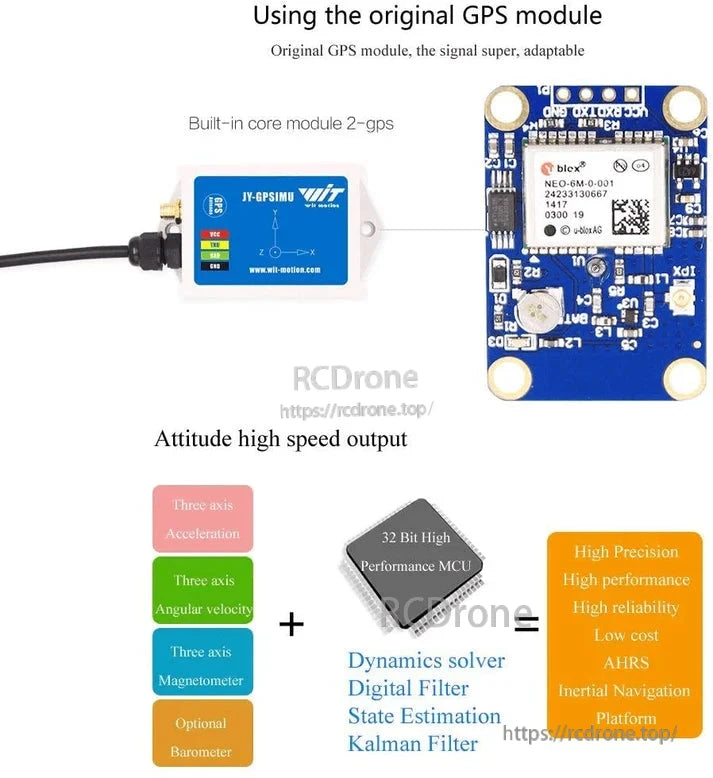
WitMotion WTGAHRS10-Axis AHRS includes GPS, high-speed attitude output, 32-bit MCU, and integrated sensors. Combines acceleration, angular velocity, magnetometer, optional barometer with digital and Kalman filters for reliable, low-cost inertial navigation.


WitMotion JY-GPSIMU 10-Axis AHRS with labeled wiring colors

Related Collections






