







Yahboom JetCobot 7-DOF Visual Collaborative Robotic Arm for Jetson Nano B01 4GB/Orin Nano SUPER/Orin NX SUPER
Yahboom JetCobot 7-DOF Visual Collaborative Robotic Arm for Jetson Nano B01 4GB/Orin Nano SUPER/Orin NX SUPER
Yahboom
Couldn't load pickup availability
Overview
JetCobot is a 7-axis visual collaborative robotic arm that uses an NVIDIA Jetson series development board as the main control board (Jetson Nano B01 4GB / Jetson Orin Nano SUPER / Jetson Orin NX SUPER). With a UR-like robot configuration, ROS robot operating system, and an inverse kinematics algorithm, it supports coordinate control, motion planning, gripping, sorting, and related vision-interaction tasks.
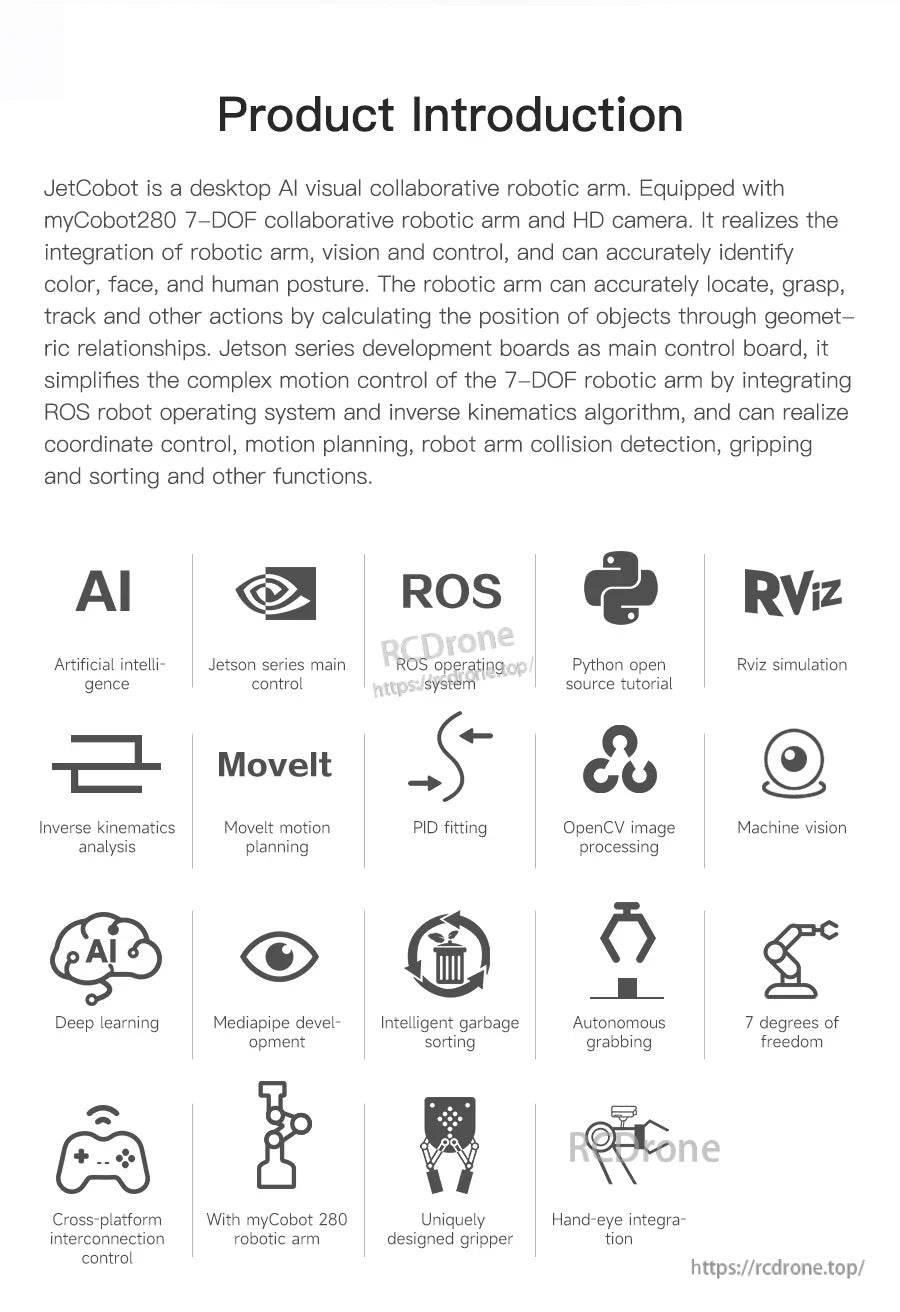
JetCobot integrates a robotic arm and camera system. It is equipped with a 0.3MP USB camera (110° field of view) and supports OpenCV image processing, machine vision, and deep learning workflows for functions such as color interaction, face detection/tracking, label recognition, model training, and gesture interaction.
Key Features
- 7-DOF structure with UR-like configuration: Smooth body design, large range of motion, and hidden servo wiring (as described in the comparison chart).
- Inverse kinematics + ROS workflow: Supports coordinate control and motion planning.
- MoveIt + RViz support: Includes URDF kinematics simulation model, MoveIt simulation control/trajectory planning, collision detection, and spatial gripping scenarios.
- AI visual recognition and target tracking: Color recognition and tracking, color block sorting, color block grabbing, color interaction, face recognition and tracking, and label recognition/intelligent stacking (Apriltag label codes).
- Deep learning / model training: Supports garbage classification workflows and region-based grabbing examples (region identification: grabbing and place; region detection: customize grabbing).
- MediaPipe development / AI interaction upgrade: Gesture control action group, gesture recognition control stack, robotic arm recognition and palm tracking, and gesture posture control robotic arm.
- Multiple control methods: Supports MoveIt simulation control, handle control, and PC web control (Jupyter Lab control is also shown).
Specifications
| Product | JetCobot AI visual collaborative robotic arm |
| Degrees of freedom | 7 |
| Maximum effective arm span | 270MM |
| Joint rotation range | -153° to 153° |
| Repeat positioning accuracy | ±0.5mm |
| Camera | 0.3MP USB camera |
| Camera field of view | 110° |
| Camera frame rate (shown) | 30fps |
| Visual dimension (chart) | Plane 2D image |
| Gripper (shown) | Electric gripper |
| Gripper open-close angle (chart) | 5cm |
| Gripper range (shown) | 20-45mm |
| Gripper force (shown) | 150g force |
| Structure type (chart) | UR-like robot structure |
| Main control (chart) | Jetson Nano B01 / Jetson Orin Nano SUPER / Jetson Orin NX SUPER |
| Function (chart) | Interconnection control; MoveIt motion planning; RViz robot simulation; 2D visual interaction |
| Voice (chart) | / |
| Display (chart) | / |
Jetson Master Control Options (Reference Chart)
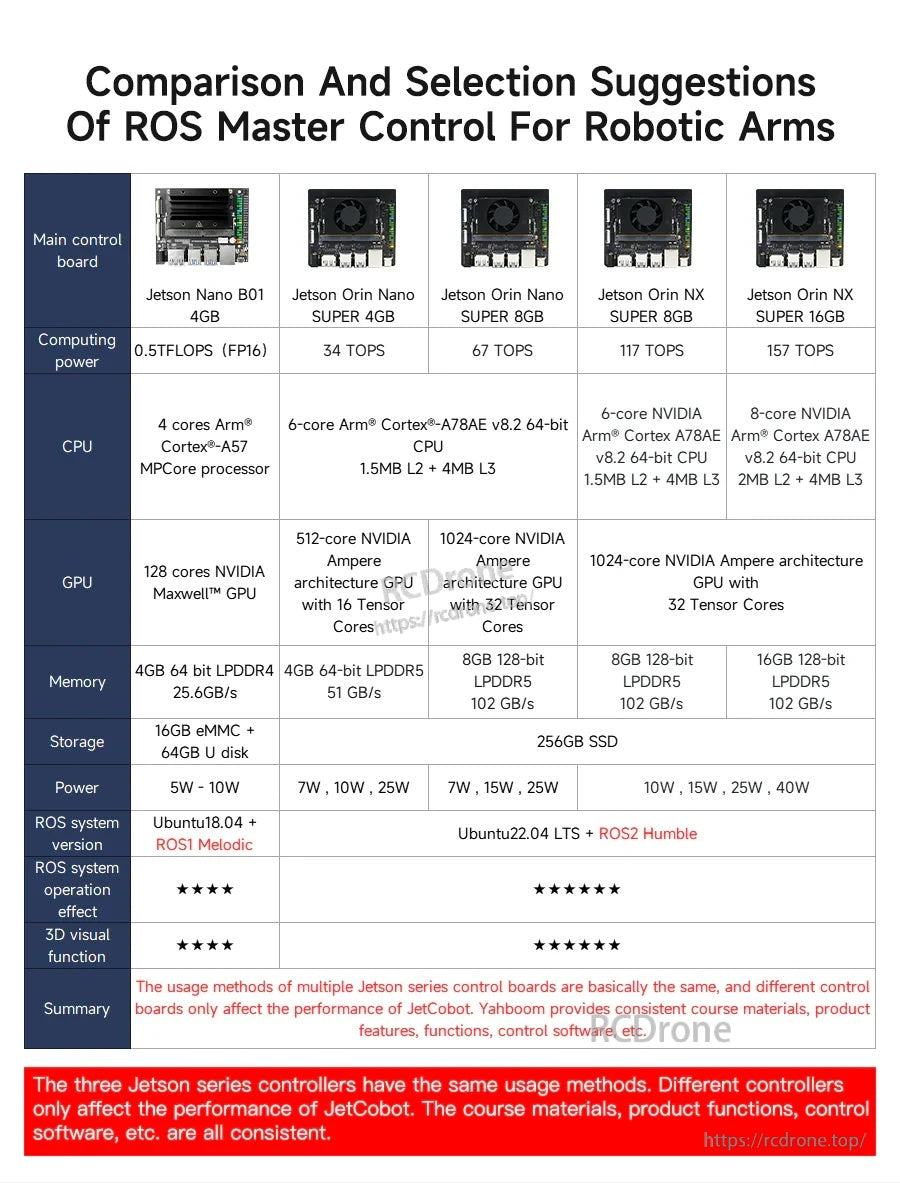
| Main control board | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 8GB | Jetson Orin NX SUPER 16GB |
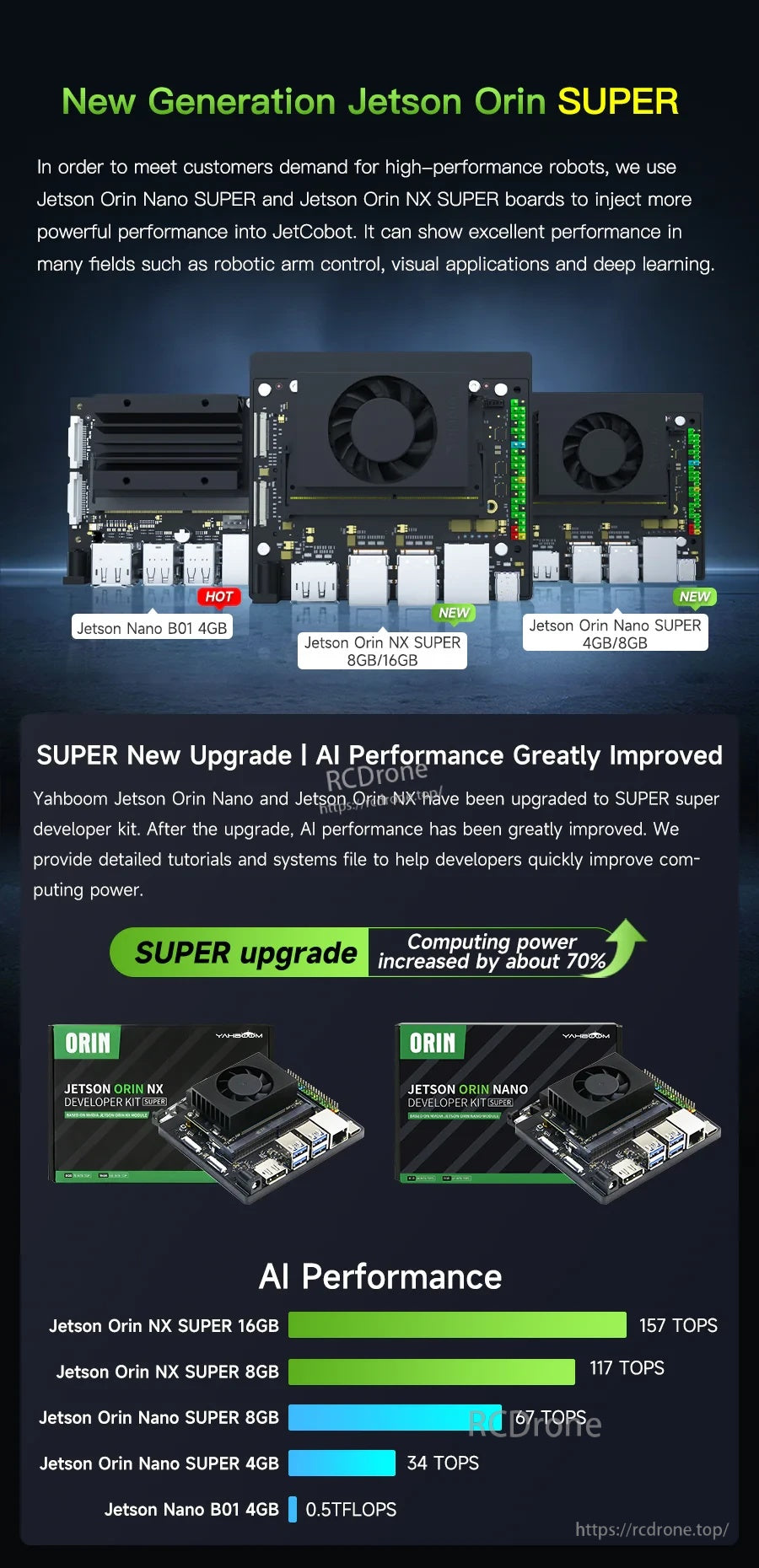
| Computing power | 0.5TFLOPS (FP16) | 34 TOPS | 67 TOPS | 117 TOPS | 157 TOPS |
| CPU | 4 cores Arm Cortex-A57 MPCore processor | 6-core Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 6-core Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 6-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 8-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU; 2MB L2 + 4MB L3 |
| GPU | 128 cores NVIDIA Maxwell GPU | 512-core NVIDIA Ampere architecture GPU with 16 Tensor Cores | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| Memory | 4GB 64-bit LPDDR4 25.6GB/s | 4GB 64-bit LPDDR5 51GB/s | 8GB 128-bit LPDDR5 102 GB/s | 8GB 128-bit LPDDR5 102 GB/s | 16GB 128-bit LPDDR5 102 GB/s |
| Storage | 16GB eMMC + 64GB U disk | 256GB SSD | |||
| Power | 5W - 10W | 7W, 10W, 25W | 7W, 15W, 25W | 10W, 15W, 25W, 40W | |
| ROS system version | Ubuntu18.04 + ROS1 Melodic | Ubuntu22.04 LTS + ROS2 Humble | |||
The chart also notes that the usage methods of multiple Jetson series control boards are basically the same; different control boards mainly affect JetCobot performance.
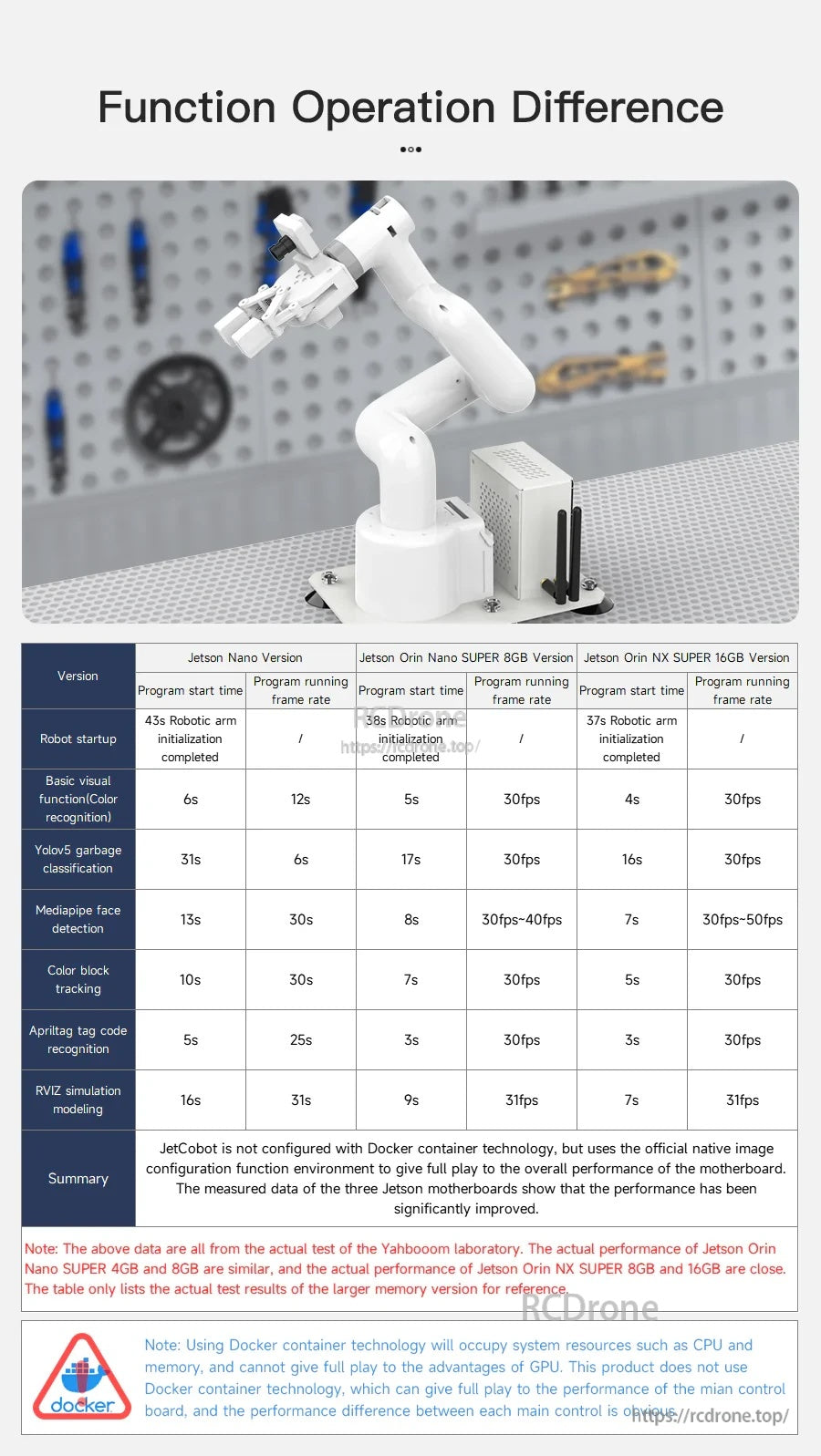
Measured Function/Performance Difference (Reference Chart)
| Item |
Jetson Nano Version Program start time / Program running frame rate |
Jetson Orin Nano SUPER 8GB Version Program start time / Program running frame rate |
Jetson Orin NX SUPER 16GB Version Program start time / Program running frame rate |
| Robot startup | 43s Robotic arm initialization completed / / | 38s Robotic arm initialization completed / / | 37s Robotic arm initialization completed / / |
| Basic visual function (Color recognition) | 6s / 12s | 5s / 30fps | 4s / 30fps |
| Yolov5 garbage classification | 31s / 6s | 17s / 30fps | 16s / 30fps |
| Mediapipe face detection | 13s / 30s | 8s / 30fps-40fps | 7s / 30fps-50fps |
| Color block tracking | 10s / 30s | 7s / 30fps | 5s / 30fps |
| Apriltag tag code recognition | 5s / 25s | 3s / 30fps | 3s / 30fps |
| RVIZ simulation modeling | 16s / 31s | 9s / 31fps | 7s / 31fps |
Notes shown with the chart: JetCobot is not configured with Docker container technology; it uses an official native image configuration function environment to give full play to overall motherboard performance. The data is from an actual Yahboom laboratory test; Jetson Orin Nano SUPER 4GB and 8GB performance is similar, and Jetson Orin NX SUPER 8GB and 16GB performance is close.
What's Included
- myCobot280 7-DOF collaborative robotic arm (JetCobot)
- Electric gripper
- USB camera
- Jetson main control (Jetson Nano B01 / Jetson Orin Nano SUPER / Jetson Orin NX SUPER, depending on version)
- OLED screen (listed in the shipping list chart)
- Accessories (as listed in the shipping list chart)
Applications
- ROS learning, kinematics, and motion planning (MoveIt / RViz)
- Machine vision and OpenCV-based interaction experiments
- AI interaction demos: color tracking, label recognition (Apriltag), gesture recognition, and model training workflows
- Desktop grasping, sorting, and basic coordinate-based pick-and-place tasks
Manuals / Documentation
- Tutorials: https://www.yahboom.net/study/JetCobot
For pre-sales selection help or after-sales support, contact https://rcdrone.top/ or email [email protected].
Details
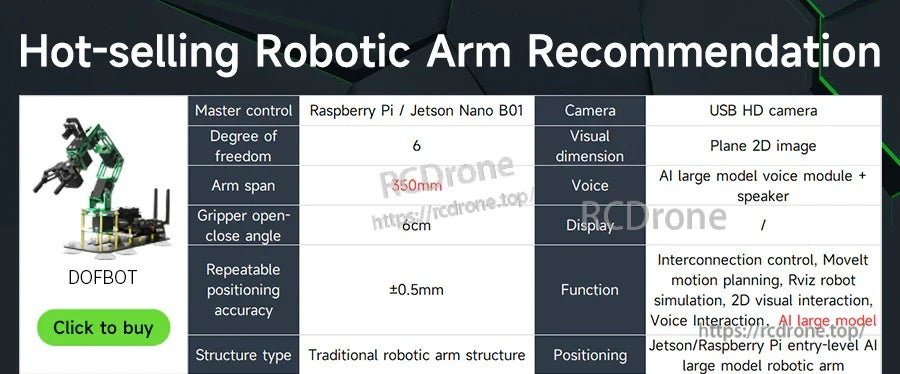
Compare JetCobot with other ROS master-control options to choose the right platform for your application.
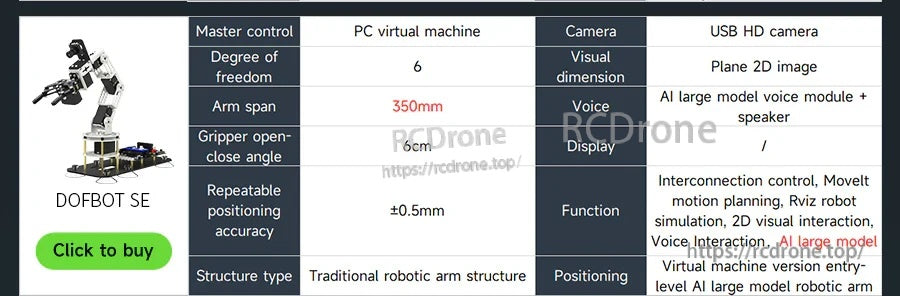
Multiple Yahboom arm platforms share a similar ROS workflow, while hardware and vision options vary by model.
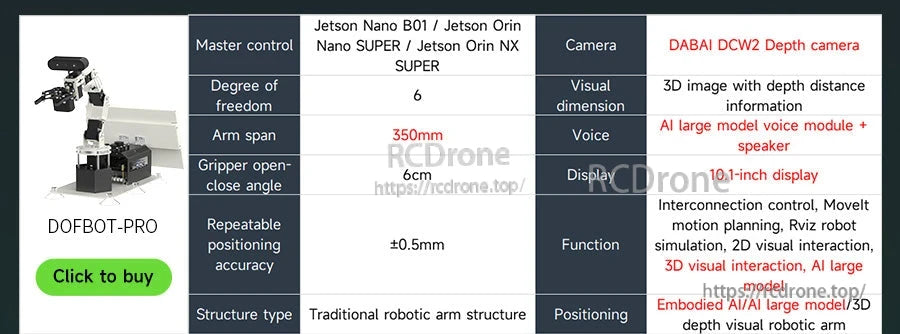
Depth-camera configurations support 3D vision tasks such as distance-aware tracking and interaction.
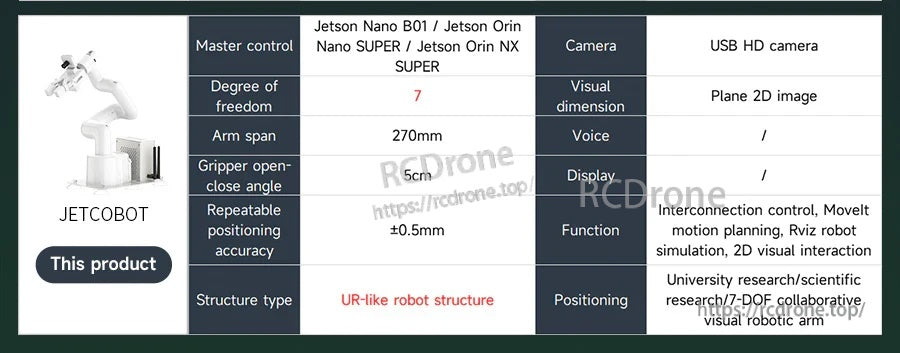
JetCobot focuses on a 7-DOF UR-like structure with millimeter-level repeatability for coordinated motion tasks.
Yahboom JetCobot is a desktop 7-DOF visual collaborative robotic arm built around NVIDIA Jetson control boards.
A complete software stack supports ROS control, MoveIt planning, RViz visualization, and OpenCV-based vision.
Select Jetson Nano B01, Orin Nano SUPER, or Orin NX SUPER based on the compute needed for your AI pipeline.
A clear Jetson comparison helps match CPU/GPU and memory capacity to ROS and vision workloads.
Performance varies by Jetson controller, while the JetCobot feature set and course examples remain consistent.

The UR-like configuration provides a wide range of motion with a cleaner build for classroom and lab use.
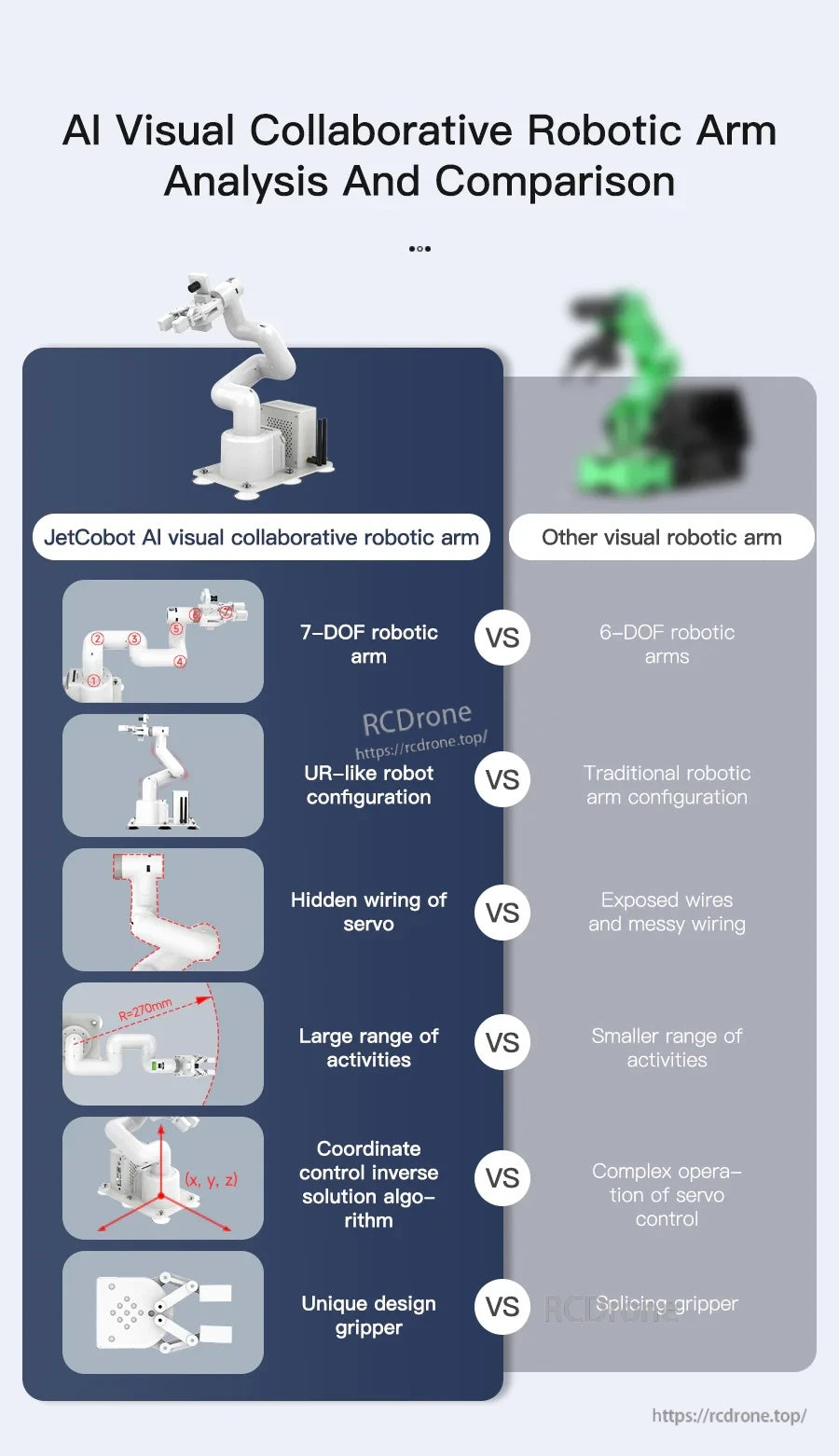
A 7-DOF layout improves flexibility for positioning, grasping, and path planning in tight workspaces.
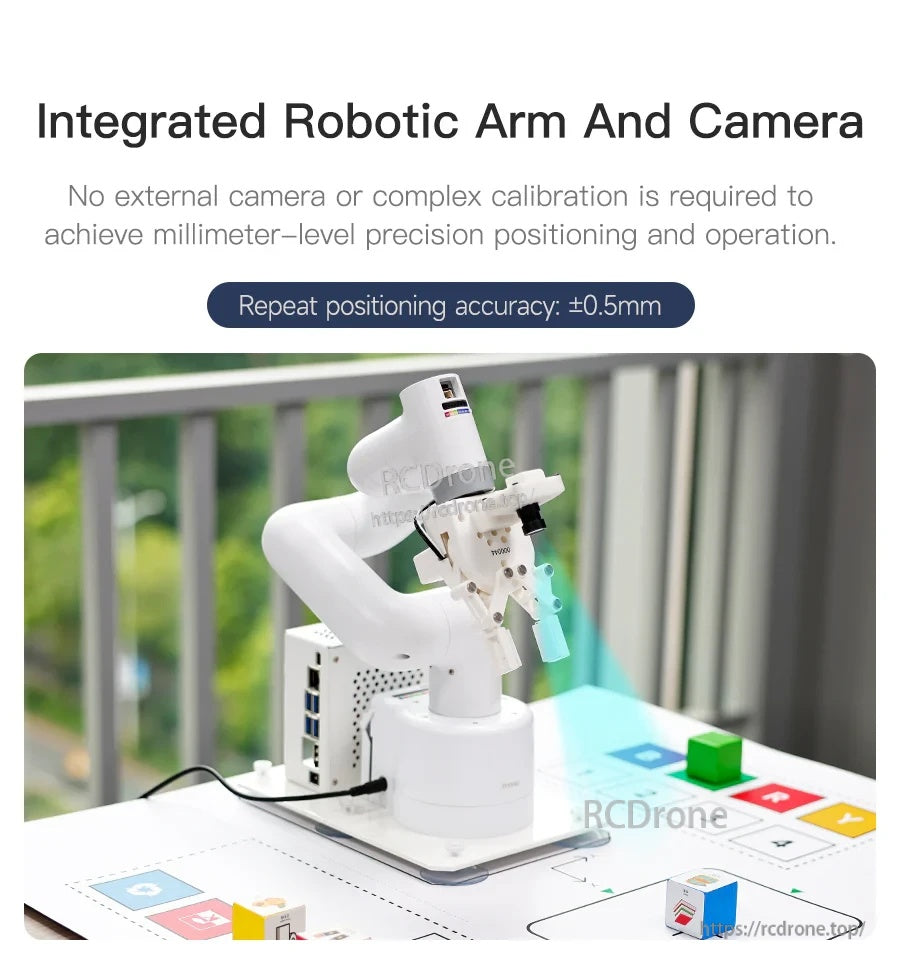
An integrated USB camera enables visual picking and sorting workflows without complex external camera setups.
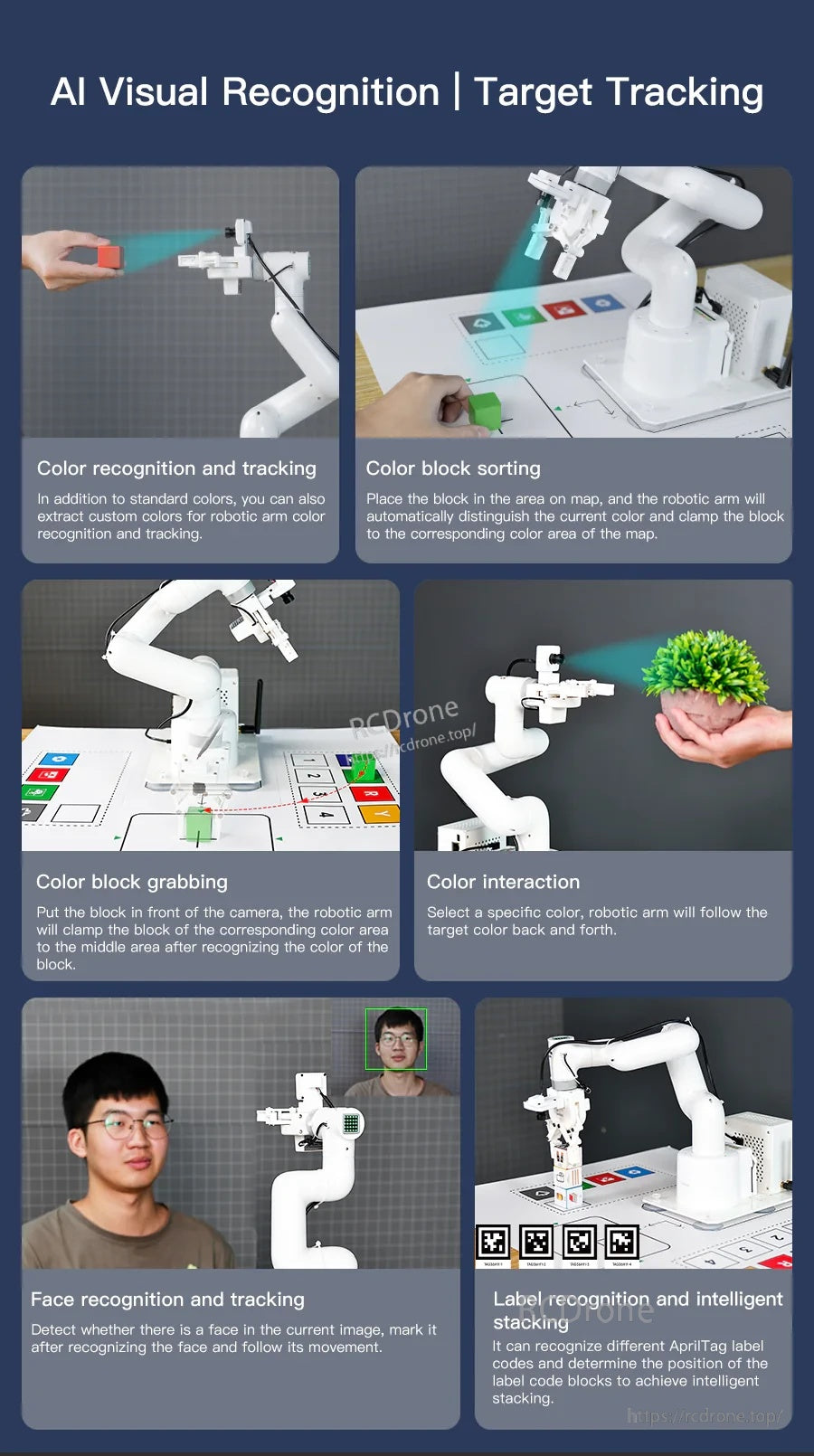
Built-in demos cover color recognition, block sorting, tag-based stacking, and tracking-based interaction.

Use deep-learning model training and MediaPipe gesture interaction to build more responsive pick-and-place tasks.
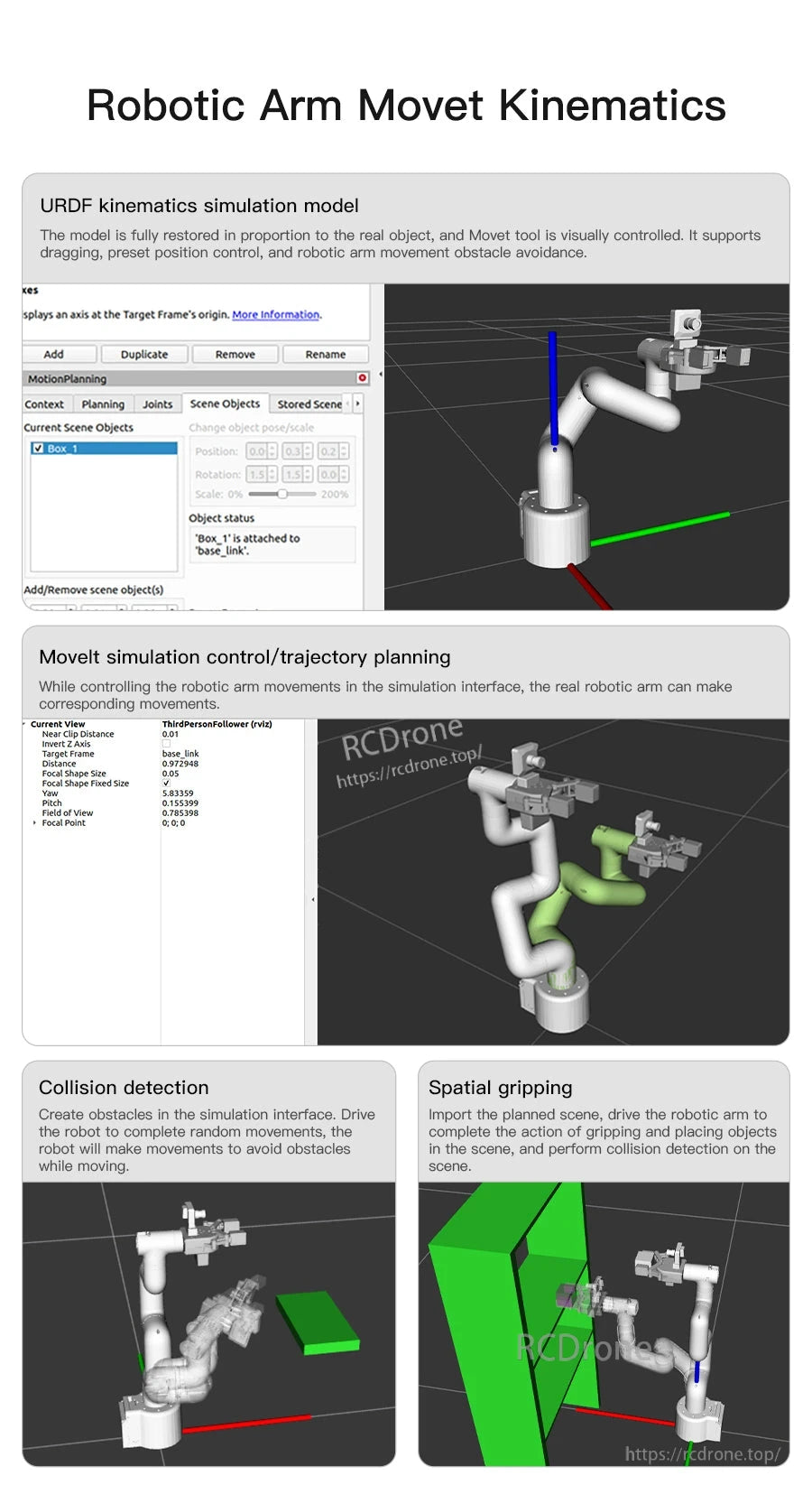
MoveIt and URDF models support simulation, trajectory planning, and collision checking before running on hardware.

Control JetCobot through a browser-based Jupyter environment or a USB gamepad for quick testing and demos.

Inverse kinematics enables coordinate input for repeatable positioning and consistent end-effector orientation.

Seven joints (J1–J7) provide extra flexibility for motion planning and coordinated grasping.
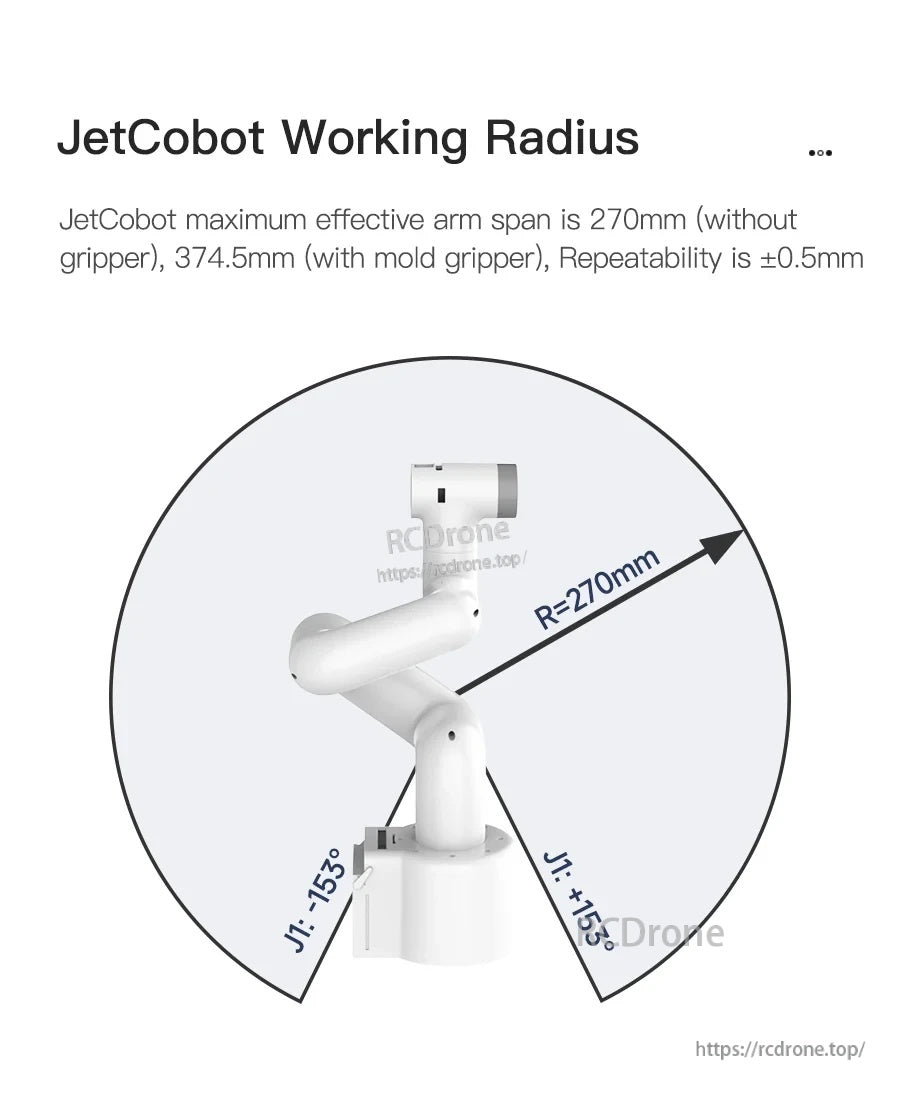
JetCobot offers a 270mm maximum effective arm span (without gripper), with J1 base rotation of ±153° and ±0.5mm repeatability.
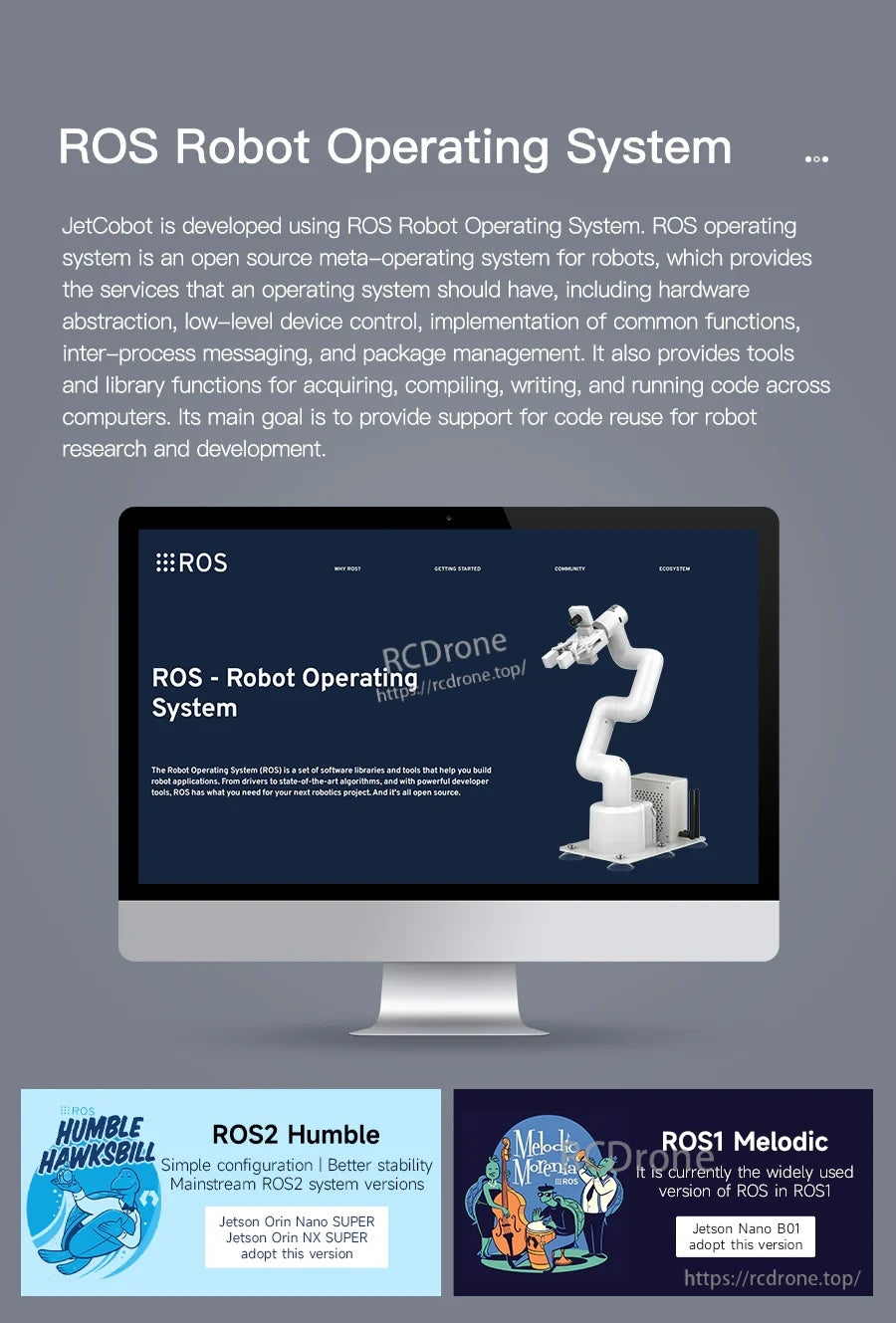
JetCobot is built around the ROS Robot Operating System and lists compatibility with ROS2 Humble and ROS1 Melodic.
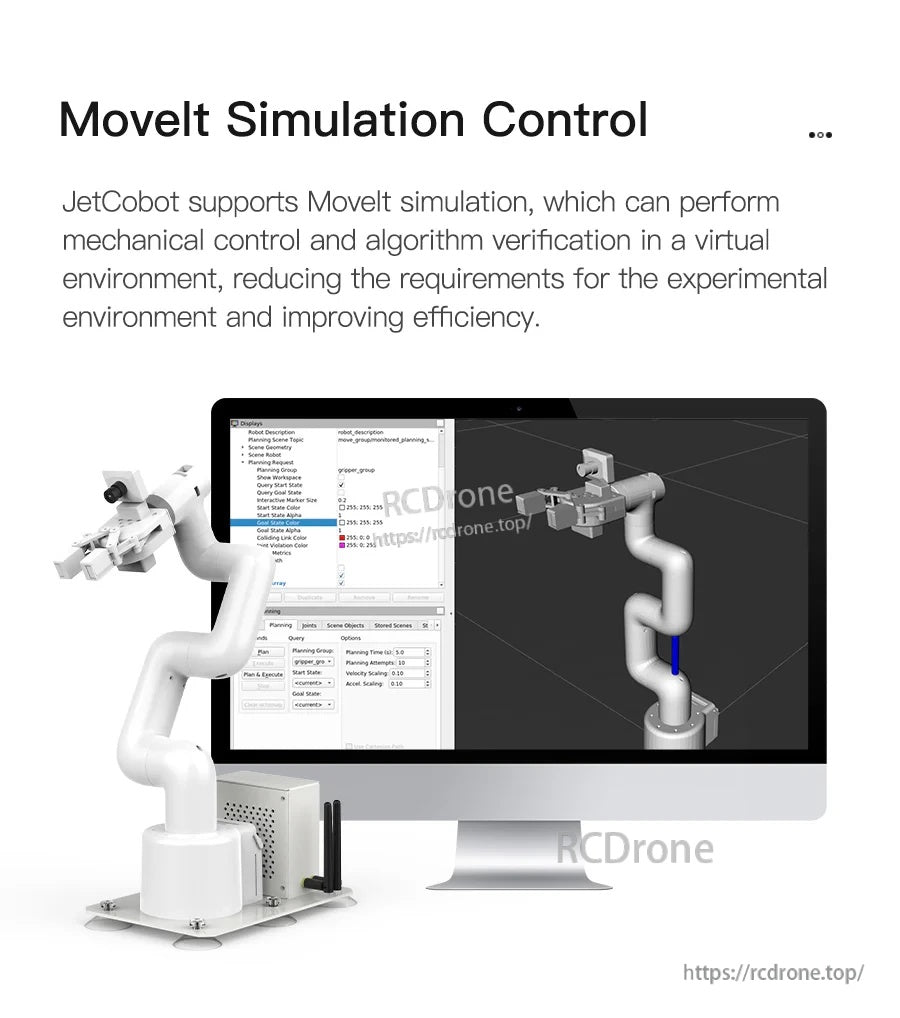
MoveIt simulation support lets the JetCobot robotic arm be tested and controlled in a virtual environment before running on hardware.
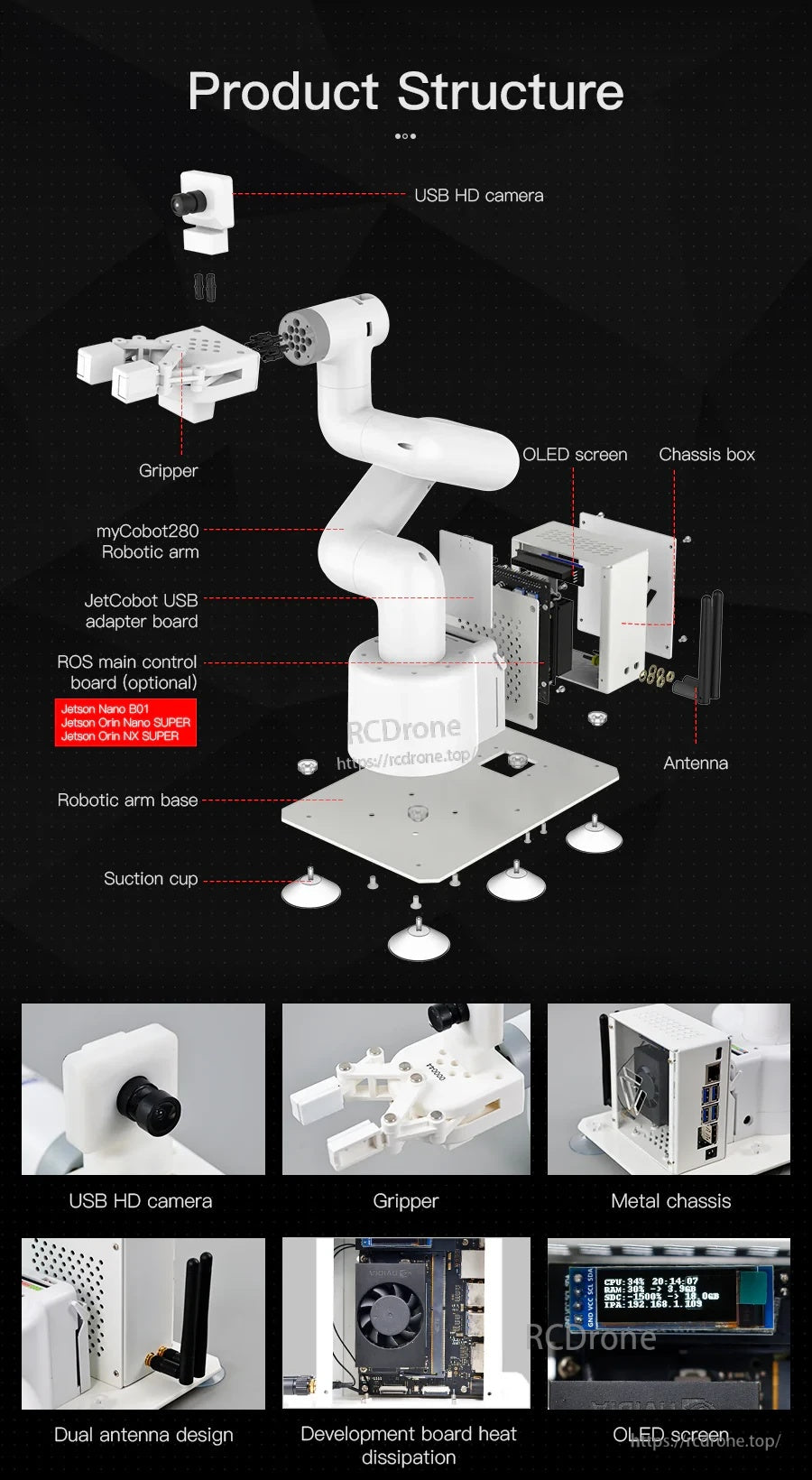
The JetCobot arm kit combines a gripper, USB HD camera, OLED screen, and a suction-cup base for stable desktop setups.
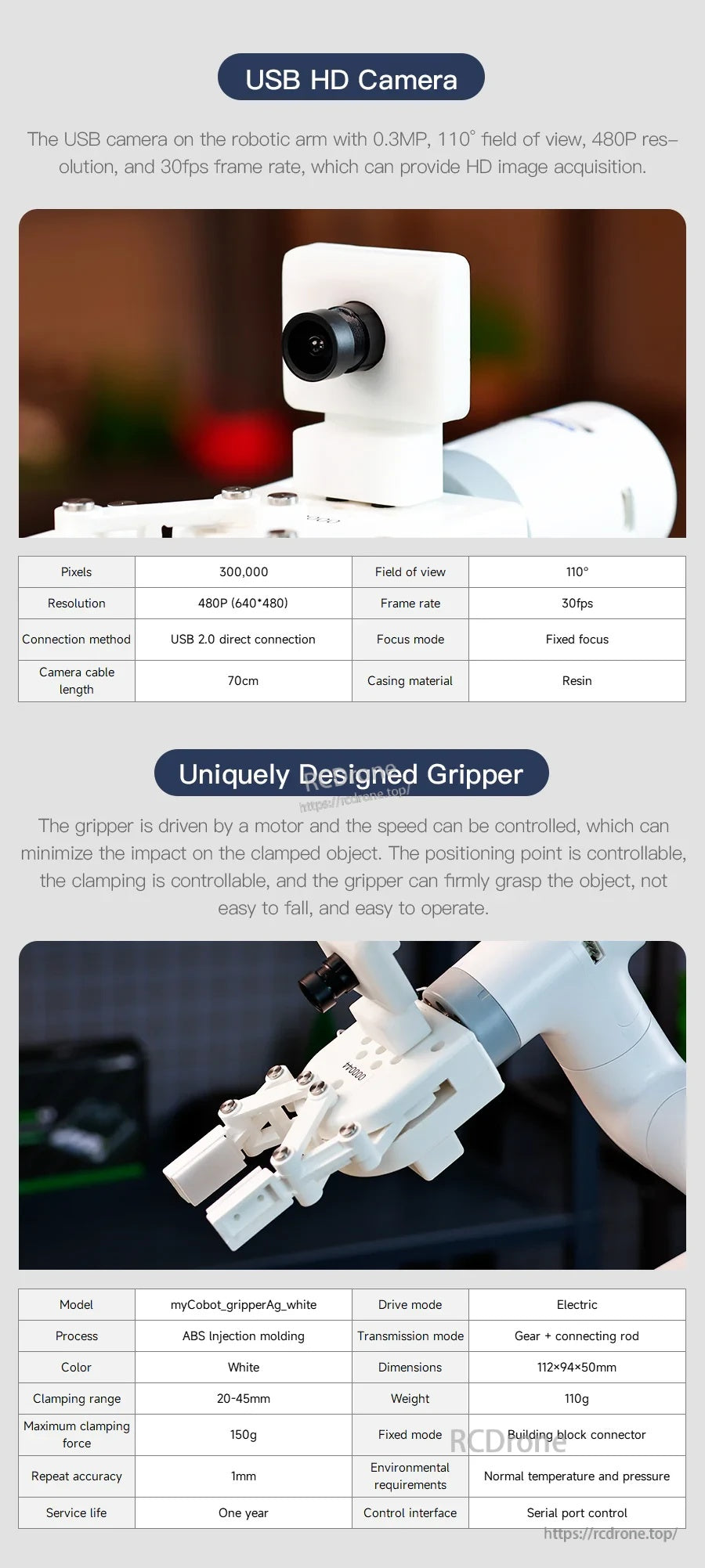
The JetCobot arm pairs a USB HD camera (480p, 30 fps, 110° field of view) with a compact electric gripper for vision-guided picking and placement tasks.
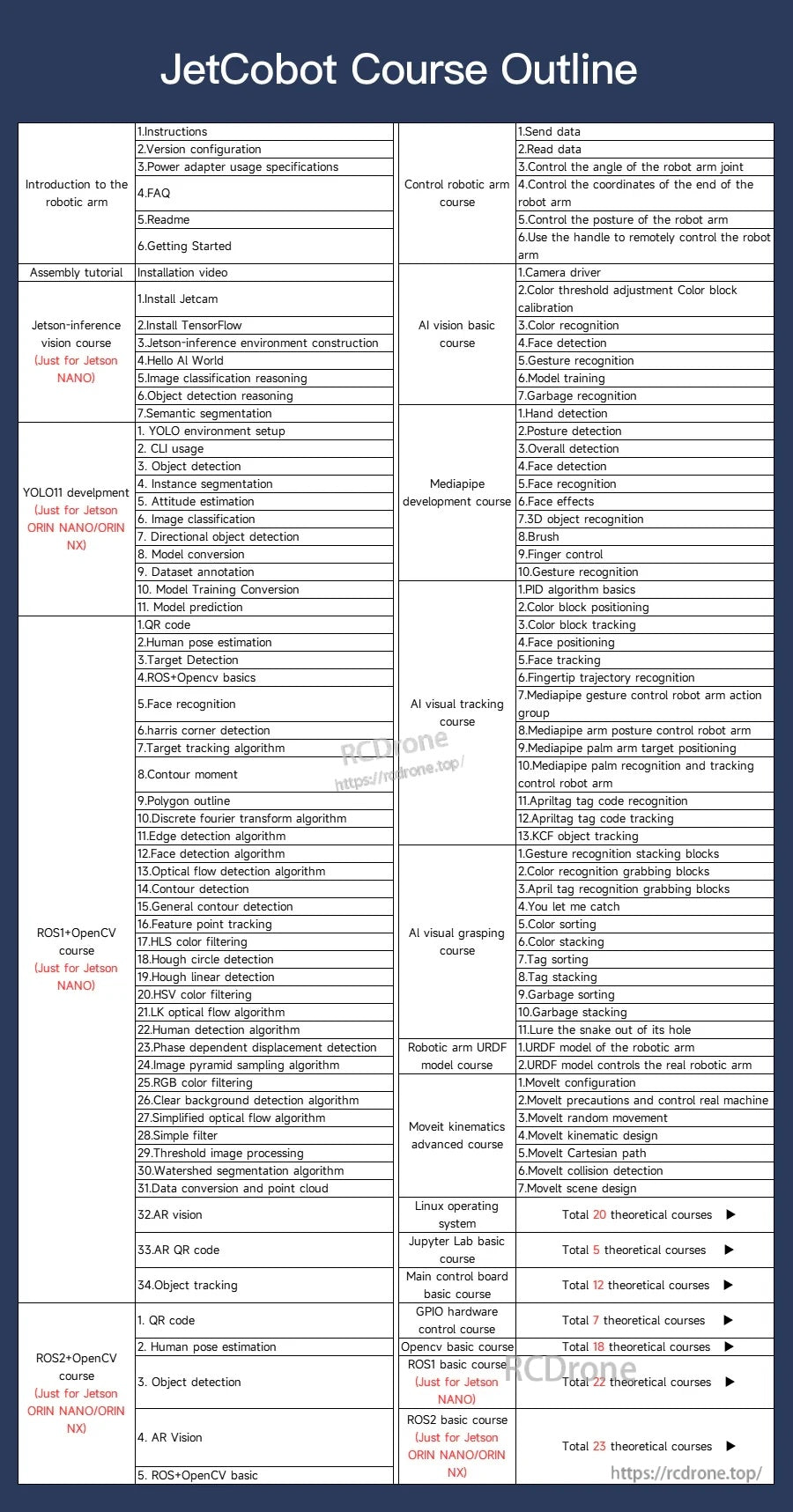
The JetCobot curriculum covers setup and assembly, ROS/Ubuntu basics, SLAM mapping, AI vision with MediaPipe, and visual tracking and grasping exercises.
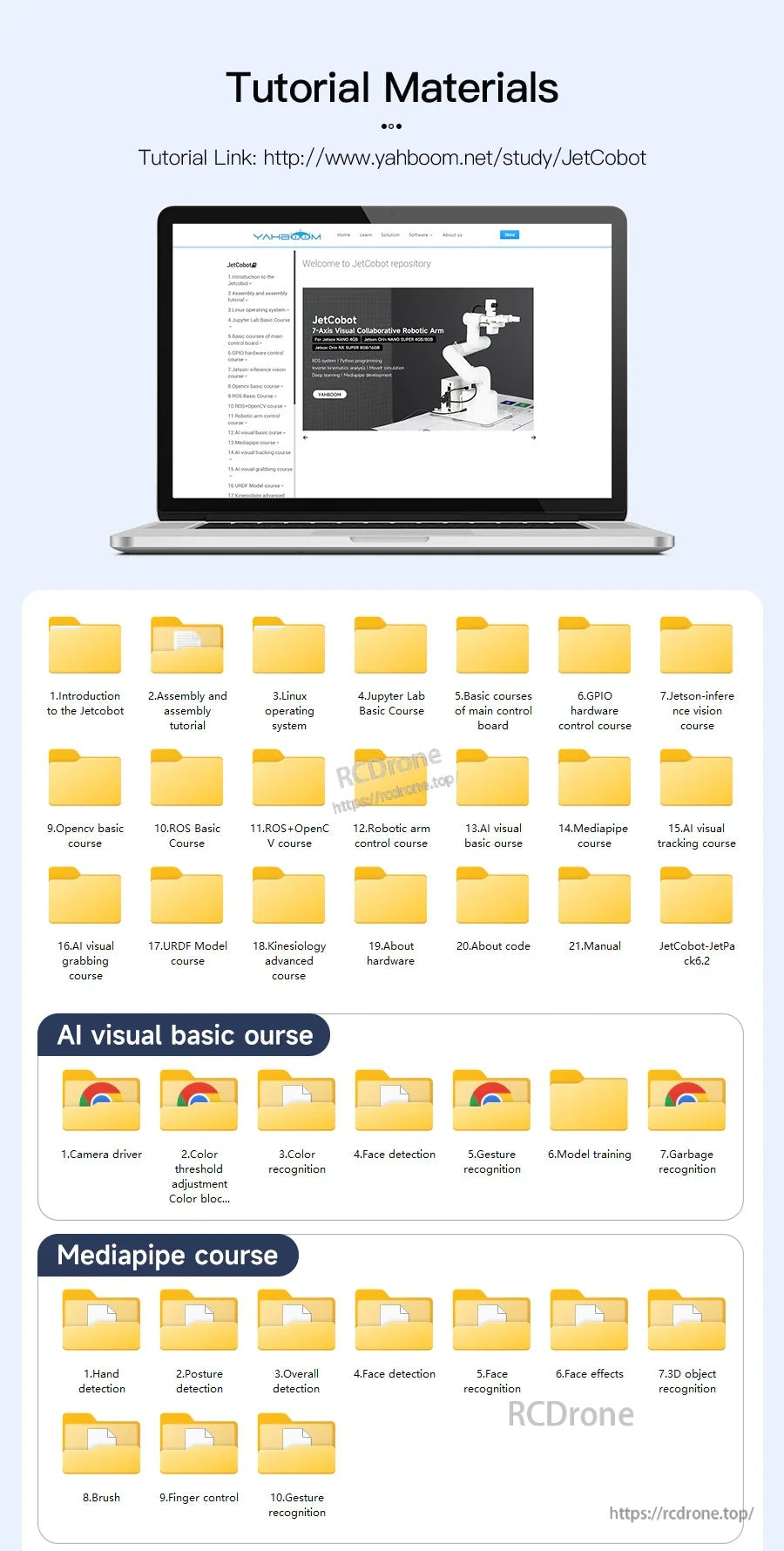
JetCobot tutorial materials include organized download folders and course content such as AI visual basics and Mediapipe, with a study link at yahboom.net/study/JetCobot.
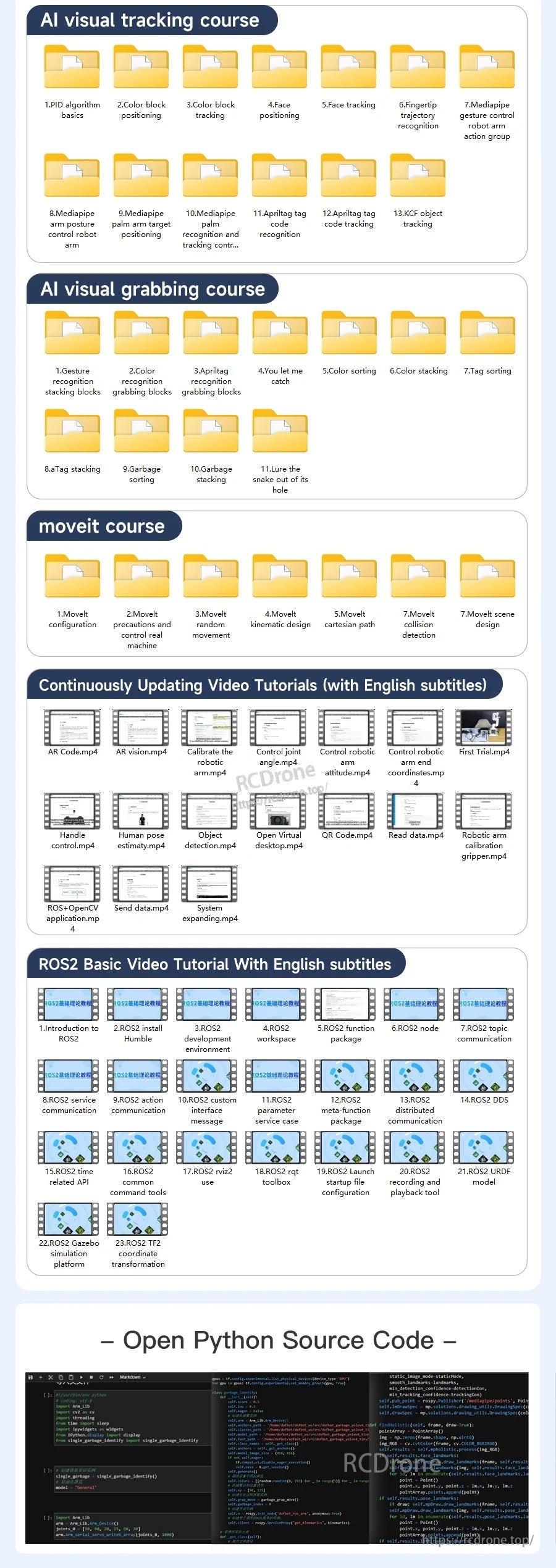
JetCobot learning resources include AI visual tracking and grabbing courses, MoveIt tutorials, ROS2 basics, and open Python source code.
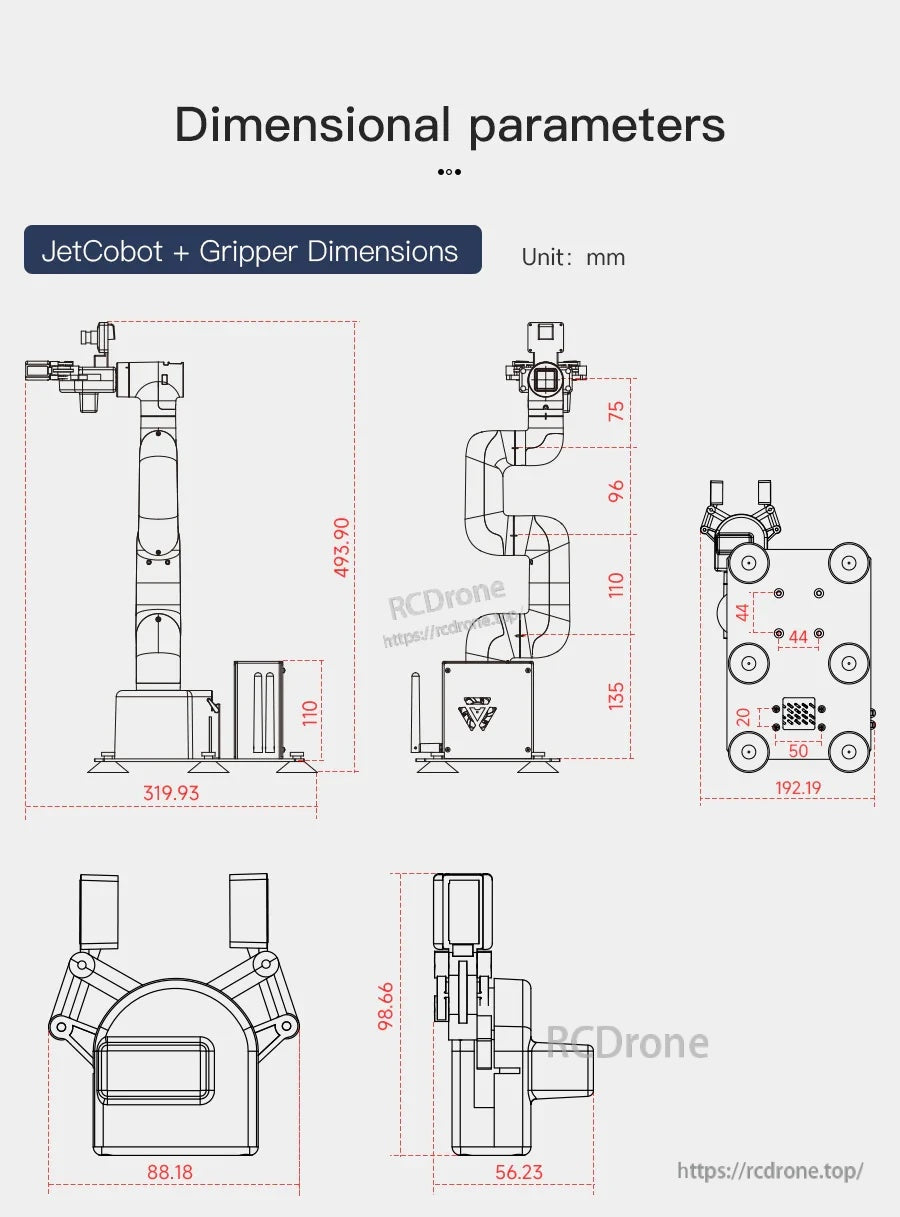
JetCobot with gripper dimensions are provided in millimeters to help plan mounting space and overall arm clearance.
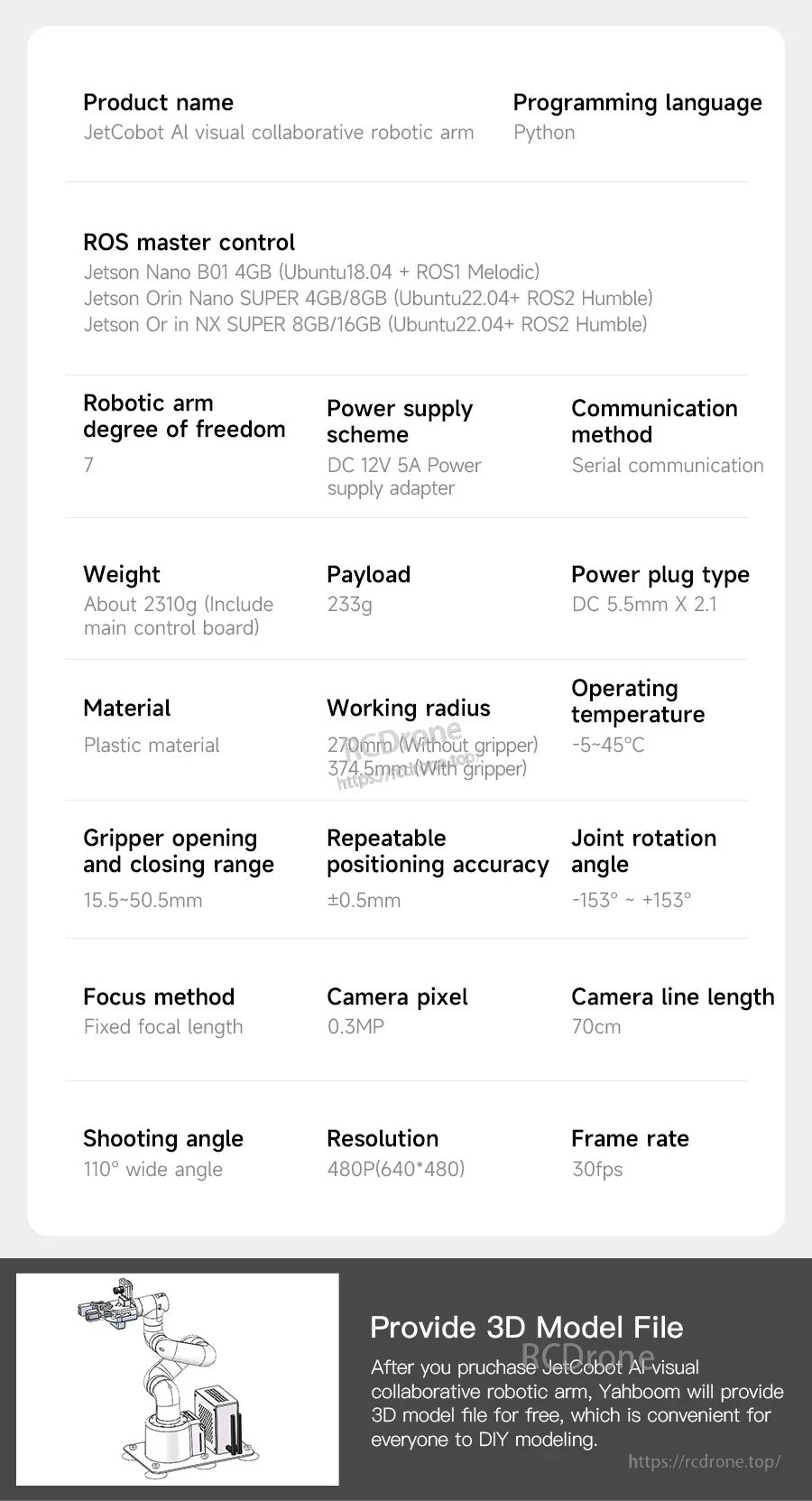
JetCobot supports Python programming with ROS options for Jetson Nano B01 and Jetson Orin Nano/NX, plus a fixed-focus 0.3MP camera (480P, 30fps, 110° wide angle).
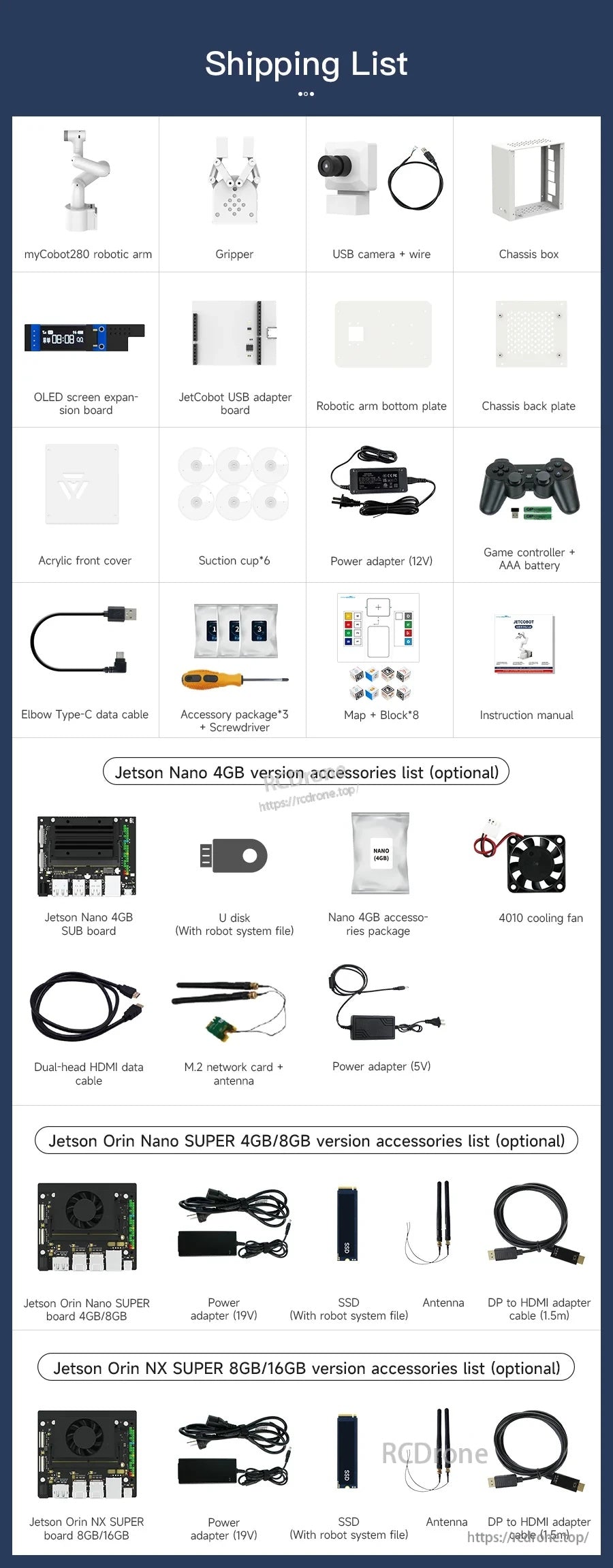
The JetCobot kit includes the gripper, USB camera, chassis components, power adapter, and wiring, with optional Jetson Nano/Orin accessories listed.
Related Collections











